2A1. General. The Pitometer underwater
log, rotary balance type, is made by the Pitometer Log Corporation, New York, New York.
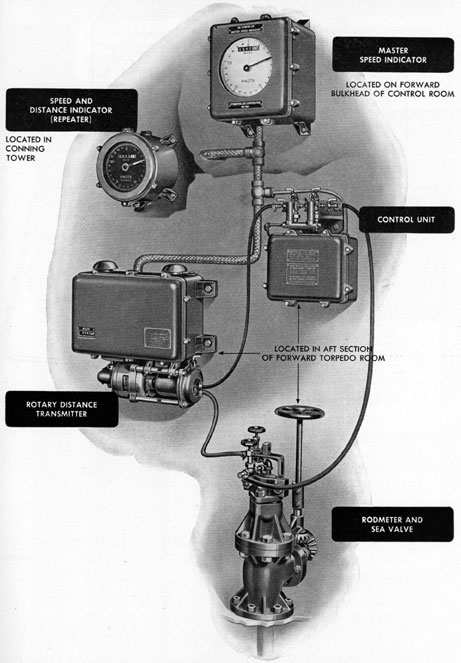
This system, illustrated in Figure 2-1, consists of five major components. Each instrument is watertight, and is designed for either
panel or bulkhead mounting.
2A2. Rodmeter. The rodmeter, commonly
called the sword, is located in the forward
torpedo room below the light draft water line.
It projects through the hull of the ship, into
the water, and is the unit in which static and
dynamic pressures are produced and transmitted to the other units of the system. When
in use, the rodmeter extends into the water
for a distance of about 3 feet. Being located
in the forward part of the ship, the rodmeter
contacts water that is least affected by the
movement of the ship or by the turbulence
of the water created by the action of the
propellers.
2A3. Sea valve. The sea valve forms a support for the rodmeter and provides a means
of closing the opening through which the
rodmeter passes when the rodmeter is withdrawn, or fully housed. It is located in a
well below the deck in the forward torpedo
room, and is bolted to the inner hull below
the light draft water line. A tube extends
from the underside of the inner hull to the
outer hull where it is welded to a flange and
guide bushing. The guide bushing forms the
lower support for the rodmeter. When the
rodmeter is withdrawn, closing of the sea
valve prevents sea water from flooding the
forward torpedo room.
2A4. Control unit. The control unit is
mounted in the forward torpedo room and is
suspended on a gimbal bracket which tends
to keep the unit in an upright position regardless of the pitching or rolling of the ship.
This unit provides a means of automatically
controlling the operation of the rotary distance transmitter. It consists of a sensitive
bellows enclosed in a watertight housing, and
a set of electrical contacts. The inside of
the bellows is hydraulically connected to the
pump of the rotary distance transmitter, while
the outside of the bellows is connected to the
static orifice of the rodmeter. The electrical
contacts control the supply of current to the
rotary distance transmitter pump drive motor.
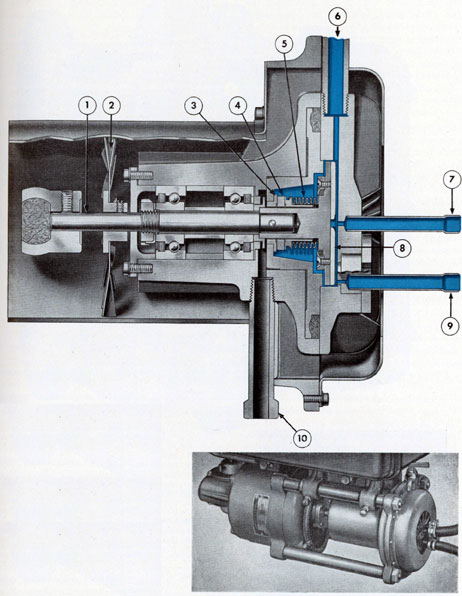
2A5. Rotary distance transmitter. The rotary
distance transmitter is located in the forward
torpedo room, below the light draft water
line. It is the unit that develops the force
applied to equalize the dynamic pressure produced within the rodmeter. It consists of an
electrically driven transtat assembly, an electric motor which drives a centrifugal-type
pump, and a distance transmitting unit. By
means of these components, rotary motion is
transmitted to the master speed indicator,
and to the speed and distance indicator.
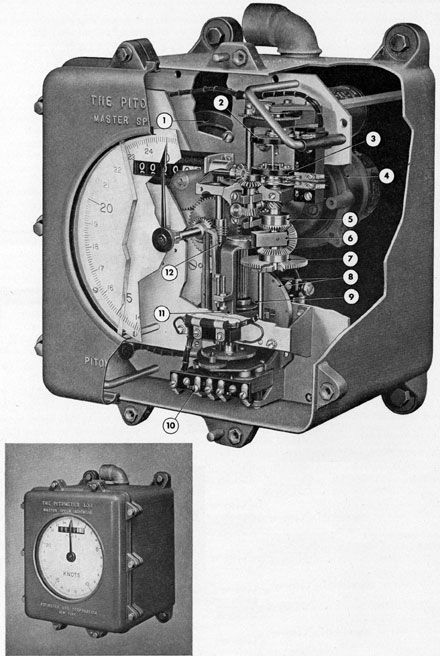
2A6. Master speed indicator. The master
speed indicator (Figure 2-3) is mounted on a
panel near the control room steering station.
Revolutions, the number of which are proportional to the distance traveled, are received
by this unit from one of the self-synchronous
transmitters in the rotary distance transmitter. These revolutions are registered on
a counter and, by means of a time element,
are converted into a speed indication in knots.
This indication is transmitted to the speed
and distance indicator.
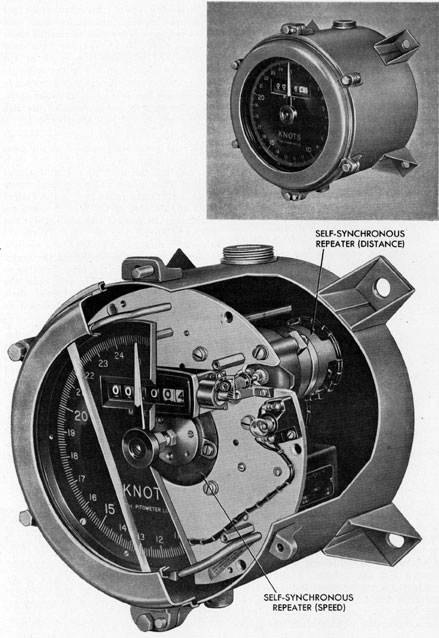
2A7. Speed and distance indicator. The
speed and distance indicator, commonly called
the repeater, is mounted in the conning tower.
It repeats the speed and distance readings of
the master speed indicator.
2A8. Constant frequency supply unit. Some
installations of the Pitometer underwater log
system include another unit known as the
constant frequency supply unit. This unit is
designed to supply a constant 60-cycle current
at 115 volts to the system.
4
Figure 2-1. Components of Pitometer underwater log-rotary balance type.
5
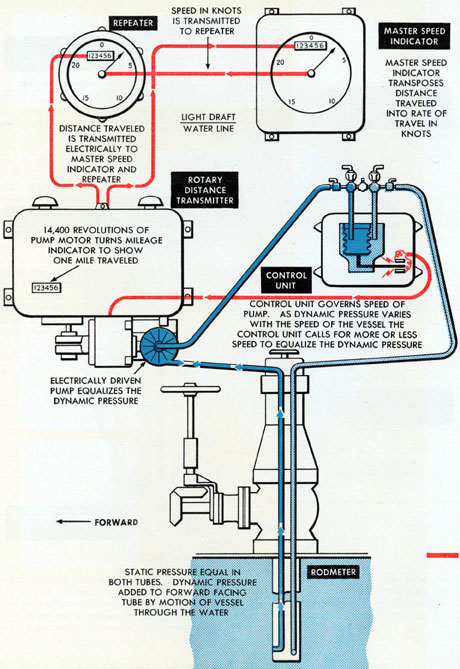
Figure 2-2. Operation of Pitometer rotary balance system.
2B1. Sea valve and rodmeter. While the ship
is stationary, the water pressure in the rodmeter is static and the log system is in balance.
As soon as the ship is underway, the forward
motion creates additional pressure through
the dynamic orifice in the rodmeter, while the
pressure through the static orifice remains the
same. This creates an unbalanced condition
in the control unit, and causes it to operate.
(See Figure 2-2.)
2B2. Control unit. As the dynamic pressure
increases, it is transmitted through the pump
of the rotary distance transmitter to the inside of the bellows in the control unit. The
pressure on the outside of the bellows (static
pressure) has not changed, and because of
this, the increased pressure inside the bellows
causes it to expand. Movement of the bellows
actuates the external contact arm, forming
an electrical contact through the contact
points at the outer end of the arm. Current
then flows to the follow-up motor in the rotary
distance transmitter.
2B3. Rotary distance transmitter. The follow-up motor operates the transtat, an electric transformer which supplies current to
the pump drive motor. As the pump drive
motor operates, the pressure produced by the
pump opposes the dynamic pressure created
in the rodmeter, reducing the pressure inside the bellows in the control unit. The
bellows then contracts, returning to its former
position. The contracting movement of the
bellows draws the external contact arm upward,
breaking the flow of current through
the contact points. The pump continues to
operate at a constant speed until a variation
in the speed of the ship causes a variation in
the pressure inside the bellows. The pump
motor is geared to a distance counter, and is
so designed that for every 14,400 revolutions
of the pump, 1 mile is recorded on the distance counter, regardless of the speed at
which that mile is covered. The distance reading is electrically transmitted to the master
speed indicator and to the repeater.
2B4. Master speed indicator. The master
speed indicator (Figure 2-3) receives the distance reading from the rotary distance transmitter, and registers it on a counter. This
reading is of distance traveled, and bears no
relation to the rate of speed. Through suitable gearing that connects the mechanism
recording the known revolutions per mile
with a mechanism that is operating at a known
number of revolutions per minute, speed in
knots is computed and registered on the dial
of the master speed indicator. This reading
is electrically transmitted to the speed and
distance indicator, or repeater, in the conning
tower.
2B5. Speed and distance indicator (repeater).
The speed reading of the master speed indicator, and the distance reading of the rotary
distance transmitter are transmitted electrically to the mechanism in the speed and distance indicator, and are registered on the
dial and counter of that unit.
C. RODMETER AND SEA VALVE
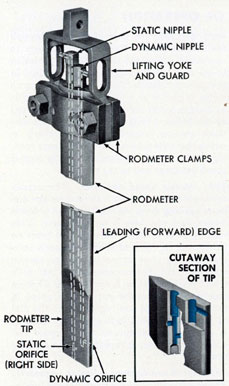
2C1. Rodmeter. The rodmeter is made of
manganese bronze, and is 8 feet 3 inches long this length is necessary because the rodmeter
projects through the inner and outer hulls
of the submarine. It is of oval, cross-section
construction, with a fiat tip at its lower end.
Two water passages are formed in the rodmeter (Figure 2-4). The upper ends of these
passages terminate in nipples to which a rubber hose is attached by means of a clamp.
Some types of rodmeter are equipped with
valves so that these passages can be closed
when the ship is submerged to a depth greater
than 200 feet, to prevent damage to the sensitive bellows in the control unit (Figure 2-5).
The lower end of the forward passage in the
rodmeter terminates in an opening or orifice
in the forward edge, and is known as the
dynamic tube and orifice. The lower end of
the after passage terminates in two openings
(one on either side of the tip), which are
known as the static tube and orifices. These
two orifices are not placed diametrically opposite each other, and therefore, cross pressures
7
Figure 2-4. Cutaway view of rodmeter.
which would affect the accurate operation of
the system do not develop. A lifting yoke
and guard are attached to the upper end of
the rodmeter by clamps, serving as a means
of raising or lowering the rodmeter, and also
forming a protection for the nipples. When
lowered, the rodmeter projects about 3 feet
through the hull into the water. A lifting
device is provided in the ship for raising and
lowering the rodmeter, and for replacing it
in the event of damage. The rodmeter must
always be raised, or housed, when the submarine docks or when, for tactical reasons,
the submarine is allowed to rest on the ocean
floor.
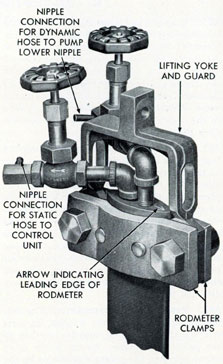
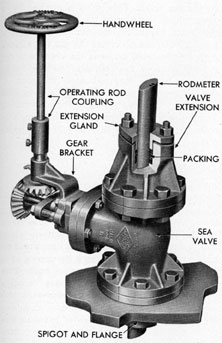
2C2. Sea valve. The sea valve is the mechanism that supports the rodmeter when the
rodmeter is extended into the sea and that
Figure 2-5. Radmeter with valves attached.
prevents water from entering the ship when
the rodmeter is removed. The valve is a 3inch gate type, operated by means of a handwheel on an operating rod which in turn is
bevel-geared to the valve stem. The sea valve
is bolted to the inner hull of the ship. A 5inch valve extension with a packing land
is mounted on the top flange of the valve.
This extension provides an upper support
when the rodmeter is projected into the sea,
and also provides a leakproof joint around
the rodmeter.
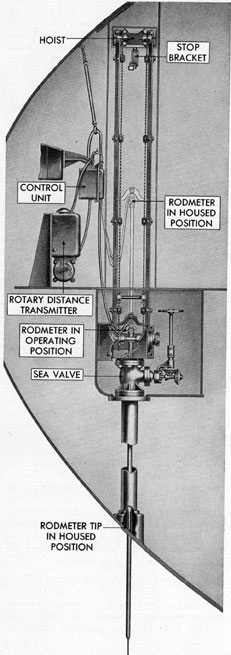
2C3. Rodmeter hoist. Submarines are
equipped with either one of two types of
rodmeter hoist (Figure 2-7) for raising and
lowering the rodmeter. One type consists
of a double sprocket and roller chain arrangement, and the other type is a single chain and
8
Figure 2-6. Sea valve.
single sprocket assembly. The upper
sprockets are mounted either on the side of
the hull or on a suitable panel near the installed rodmeter. The lower sprockets are
mounted in the sea valve and rodmeter well.
Sprockets are connected by roller chains.
Operation is by means of a hand crank
through a worm gear drive. In the single
chain hoist assembly, the chain is connected
to the clamp and guard assembly of the rodmeter by means of a connecting link which is
pinned to the chain and to the clamp and
guard assembly. In the double sprocket and
double roller chain type of hoist, the chains
are connected to a lifting bar which in turn
is pinned to the lifting yoke and guard of
the rodmeter. As the hand crank is operated,
the chains rotate around the sprockets, thereby raising or lowering the rodmeter. The
hoist crank normally is stowed in brackets
in the rodmeter and sea valve well. To operate
the hoist, a deck plate is first raised and the
Figure 2-7. Rodmeter and hoist installed.
9
crank is lifted off its brackets and placed on
the hoist operating rod. When in the lowered,
or operating, position, the clamp and guard
on the upper end of the rodmeter are flush
with the top of the extension on the sea valve.
Approximately 32 turns of the crank are required to raise the rodmeter to the normal
housed position. The normal housed position
of the rodmeter is defined as the position that
will permit the tip to just clear the outer hull;
In this position, approximately half of the
length of the rodmeter is above the extension
on the sea valve. This point is marked by a
plate which is mounted on the hull side of
the hoist bracket. The rodmeter is fully
housed when the tip clears the sea valve gate.
Approximately 82 turns of the crank are required to raise the rodmeter to the fully
housed position. Approximately 90 turns of
the crank are required to raise the rodmeter
to its extreme raised position for inspection.
The sea valve should be closed whenever the
rodmeter is raised to the fully housed position.
D. CONTROL UNIT
2D1. Control unit case. The control unit
case (Figure 2-8) is mounted on a gimbal
bracket, and is suspended above the rotary
distance transmitter in the forward torpedo
room. Tapped openings which contain pipe
plugs are located on the upper and lower
sides of the case to permit access to the
upper and lower adjustable stop rods. A third
opening is provided in one end of the case to
permit access to the inner contact arm clamp.
The case cover, equipped with a rubber seal,
is doweled in position on the case and secured
to the case with cap screws.
2D2. Valve and pipe assembly. A valve and
pipe assembly is mounted above the control
unit case to permit venting, or bleeding, of air
from the hydraulic system. Two vent cocks
are provided to vent the bellows chamber;
one vent cock is connected to the piping that
terminates inside the bellows; the other
vent cock is connected to piping that terminates in the bellows housing outside the
bellows. The inside of the bellows is hydraulically connected to the nipple fitting on
the center of the pump; the outside of the
bellows is connected hydraulically to the
nipple fitting on the static tube of the rodmeter. A control valve is mounted at the
control unit end of each of these hydraulic
lines. A bypass valve is mounted between the
static and dynamic control valves.
2D3. Bellows assembly. The primer bellows
assembly used on submarines consists of a
hydraulic bellows which is mounted in a cast
bronze watertight housing to protect the
bellows from the high pressures caused by
submersion. The primer bellows is mechanically, connected to an external contact arm
which actuates electrical circuits through a
lever. The upper end of the bellows is secured
to the bellows housing by a bellows ring.
The lower end of the bellows is connected to
a seal bellows mounting stud by means of a
cap screw and bellows extension post. The
seal bellows mounting stud passes through
the bellows housing and is secured to the
contact lever shaft by a bellows shoulder
screw. A water seal is provided between the
bellows mounting stud and the pressure
bellows housing by a seal bellows. The seal
bellows is attached to the pressure bellows
housing by means of a bellows seal cap and
gasket. The contact lever shaft is supported
in ball bearings which in turn are mounted in
a pillow block.
A Y-shaped external contact arm is
mounted on the ends of the contact lever
shaft by adjustable clamps. Upper and lower
adjustable stop rods are provided to limit the
motion of the bellows, thereby preventing
damage to the interior parts at times of excessive pressure differences in the bellows.
As the ship moves forward, the dynamic pressure in the bellows causes the bellows and its
attached linkage to move downward, establishing electrical contact at the lower end of
the external contact arm.
2D4. Electrical contacts. Upper and lower
platinum contacts are attached to springs on
an extension of the external contact arm. A
pigtail wire connects the inner arm of the
external contact arm with the right-hand
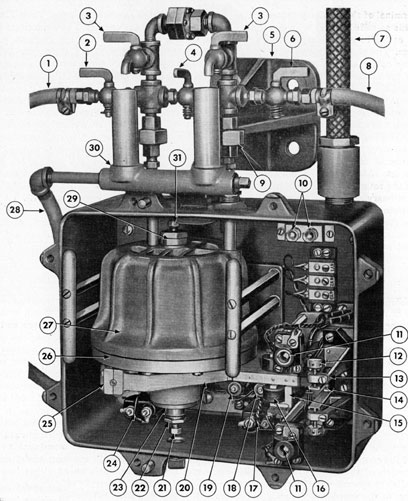
17. CONDENSER 0.5 MICROFARAD
18. 1000-OHM RESISTOR
19. 100-OHM RESISTOR
20. EXTERNAL CONTACT ARM
21. LOWER ADJUSTABLE STOP SCREW (SHORT)
22. GLAND NUT
23. HOUSING END CAP
24. CONDENSER 0.5 MICROFARAD
25. OUTER CONTACT ARM CLAMP
26. BELLOWS HOUSING COVER
27. BELLOWS HOUSING
28. DRIP TUBE DRAIN HOSE
29. BELLOWS HOUSING CAP
30. DRIP TUBE FITTING AND GIMBAL SUPPORT
31. UPPER ADJUSTABLE STOP SCREW (LONG)
Figure 2-8. Control unit, cover removed.
11
terminal of the auxiliary center contact block.
This so-called pigtail wire is a light wire and
is coiled to prevent any drag on the contact
arm. The pigtail is connected from the auxiliary center contact block through a resistor
to the center terminal of the terminal block
located in the upper right side of the control
unit. Upper and lower stationary contact
points are mounted in brackets in the control
unit, and mate with the contact points on the
end of the external contact arm. The upper
stationary contact is connected to the upper
terminal of the terminal block, and thence
to one shading coil of the follow-up motor
in the rotary distance transmitter. The lower
stationary contact is connected to the lower
terminal of the terminal block and thence
to the other shading coil of the follow-up
motor. Magnetic coils mounted one above
and one below the external contact arm are
known as antihunting coils. Their function is
to assist the operation of the contact by causing a rapid break of the contacts when the
bellows pressures are equalized. When the
ship begins to move forward, or to increase
speed, the bellows and its attached linkage
move downward. The contact arm also moves
downward, establishing contact between the
arm and the lower stationary contact. Current
then passes to the transmitter mechanism in
the rotary distance transmitter, actuating the
pump to equalize the pressure in the bellows.
Conversely, when the ship slows down or
stops, the contact arm moves upward to make
contact with the upper stationary contact.
Current then flows through the transmitter
mechanism in the rotary distance transmitter,
and causes the pump to slow down to a point
at which the pressures in the bellows are
equalized.
E. ROTARY DISTANCE TRANSMITTER
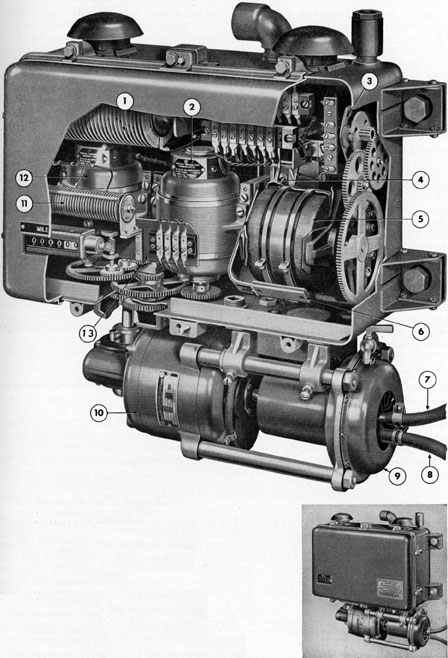
2E1. Rotary distance transmitter. The rotary
distance transmitter (Figure 2-9) consists
of four major units: the pump, the pump drive
motor, the distance transmitting unit, and the
motor-driven transtat assembly. The pump
and the pump drive motor are mounted beneath the rotary distance transmitter case.
The case contains the motor-driven transtat
assembly, rectifiers, two electrical transmitters, a counter, and a gear train which connects the transmitters with the pump drive
motor. The functions of the rotary distance
transmitter are to control the speed of the
pump, to equalize the pressures in the bellows
of the control unit, and to transmit the rotary
motion of the pump (14,400 revolutions per
mile) to a counter in the master speed indicator, to the speed and distance indicator, and
to the dead reckoning analyzer.
2E2. Motor driven transtat. The transtat
assembly derives its name from the fact that
it functions as a combination transformer
and rheostat. Electric current from the control unit, actuated by the control unit external
contact arm, flows through a shading coil of
the follow-up motor in the rotary distance
transmitter, and causes this motor to operate.
When the contact arm moves downward, the
follow-up motor runs in a counterclockwise
direction. This motor, through a gear train
at the right side of the transtat assembly,
then moves the rotating brush arm of the
transtat toward its high voltage end. Alternating current starts flowing through the
rectifiers, which change the current to d.c.,
and on to the pump drive motor armature.
When the current becomes approximately
15 volts, the pump starts to turn over slowly,
gradually increasing in speed until the pump
pressure equalizes the pressures in the bellows, at which time the contact arm centers
and shuts off the flow of current to the follow up motor. The pump continues to operate
at a substantially constant speed until such
time as the ship's speed either increases or
decreases. When the ship decreases its speed,
the opposite action occurs. The opposite
shading coil of the follow-up motor is energized, causing the motor to turn in a clockwise direction. The transtat brush arm moves
toward its low voltage end, and the pump
slows down until the pressures in the bellows are again equalized.
2E3. Pump. Figure 2-10 shows a centrifugal-type pump. The pump shaft is coupled
to a pump-driven motor shaft, which drives
a radially bladed impeller. Hydraulic pressure developed by the pump is used to oppose
12
1. ARMATURE RECTIFIER
2. SELF-SYNCHRONOUS TRANSMITTER TO DRT SYSTEM (360 R.P. MILE)
3. FOLLOW-UP SWITCHES
4. LIMIT SWITCHES
5. TRANSTAT
6. TRANSTAT ARM
7. PRESSURE HOSE TO CONTROL UNIT
8. DYNAMIC PRESSURE HOSE FROM RODMETER
9. PUMP
10. PUMP MOTOR
11. FIELD RECTIFIER
12. SELF-SYNCHRONOUS TRANSMITTER TO MASTER SPEED INDICATOR (60 R.P. MILE)
13. COUNTER MOUNTING PLATE WITH MOTOR TERMINAL BLOCK.
Figure 2-9. Cutaway view of rotary distance transmitter.
13
the dynamic pressure which is transmitted
through the rodmeter. The pump is so designed that it turns 14,400 revolutions for
every mile the ship travels. The pump is
equipped with two hydraulic nipples. The
outer nipple is hydraulically connected to
the dynamic nipple of the rodmeter. The
center nipple is hydraulically connected to
the left-hand nipple of the control unit.
When the ship moves forward, the pump
drive motor drives the pump impeller, producing a pressure at the outer nipple which
opposes the dynamic pressure from the rodmeter. When the pump impeller reaches a
speed sufficient to produce a balance between
these opposing forces, the external and internal pressures of the bellows in the control
unit are" equal. The contact arm in the control
unit is in its central position, the transtat
brush arm maintains its approximate position
with a slight hunting, motion, and the pump
drive motor drives the pump at an approximately steady speed until the ship's speed
increases or decreases.
2E4. Pump drive motor. The electric motor
that drives the pump receives its power from
rectifiers in the rotary distance transmitter,
which change the a.c. supply to d.c. Direct
current is used because speed regulation of
a d.c. motor is superior to that of an a.c.
motor. The field rectifier (small rectifier)
supplies a voltage to the motor field which
is constant regardless of motor speed. The
armature rectifiers (large rectifiers) supply
a variable voltage to the motor armature.
This voltage is controlled by the position of
the transtat brush arm. With the field voltage
constant, the motor will not operate until the
armature voltage reaches approximately 15
volts. Above 15 volts, the greater the armature
voltage, the greater will be the pump motor
speed. The motor also drives a shaft and
a slow speed gear train which is connected to
a counter and two self-synchronous transmitters. The gear train is so designed that for
every 14,400 turns of the pump drive motor
shaft, one mile is registered on the counter.
The left-hand transmitter turns at the rate
of 60 revolutions per nautical mile. These
revolutions are transmitted to the master
speed indicator and to the speed and distance
indicator. A second transmitter located in
the left center of the case is turned at the rate
of 360 revolutions per nautical mile and
transmits these revolutions to the dead reckoning analyzer.
F. MASTER SPEED INDICATOR
2F1. Master speed indicator. The master
speed indicator (Figures 2-3 and 2-11),
located near the control room steering station, consists of the following components:
self-synchronous repeater, self-synchronous
transmitter, slip ring and contact assembly,
differential assembly, lead screw drive motor,
counter, roller and disk assembly, and a constant speed (synchronous) motor. These components are mounted on a main mounting
plate in such a manner that the whole assembly can be removed from the case as a unit
for inspection and tests.
2F2. Self-synchronous repeater. The self-synchronous repeater receives rotary motion
at the rate of 60 revolutions per nautical mile
from the self-synchronous transmitter in the
rotary distance transmitter. This rotary
motion of the repeater shaft is transmitted
through a worm and worm gear to a counter
in the master speed indicator which registers
the distance traveled. The shaft extension of
the self-synchronous repeater also carries a
spiral gear which meshes with the spiral gear
fastened to the upper shaft of the differential.
When the repeater shaft is turned, the upper
differential gear is also turned.
2F3. Differential. The upper end of the
differential shaft is connected to the slip
ring and contact assembly. The lower differential gear is meshed through a spur gear
with the roller shaft and pinion of the lead
screw assembly. The upper differential gear
is free to rotate on the differential shaft. The
small differential pinion gear is free to rotate
on the differential spider, and is in mesh with
both differential bevel face gears. If the
speeds of the two bevel face gears are not
equal, the spider, which is rigidly attached
to the differential shaft, will rotate in a direction corresponding to that of the faster running gear. This turns the slip ring and contact
14
1. IMPELLER SHAFT
2. PUMP FAN
3. ROTARY SEAL INSERT
4. SEAL RING
5. ROTARY SEAL BELLOWS
6. VENTING COCK
7. HOSE CONNECTING NIPPLE, TO CONTROL UNIT
8. PUMP IMPELLER
9. HOSE CONNECTING NIPPLE, TO RODOMETER
10. DRIP FITTING
Figure 2-10. Cutaway view of rotary pump.
15
1. SELF-SYNCHRONOUS TRANSMITTER
2. FOLLOW-UP CONTACT ASSEMBLY
3. SLIP RING AND CONTACT ASSEMBLY
4. SELF-SYNCHRONOUS REPEATER
5. UPPER DIFFERENTIAL GEAR
6. DIFFERENTIAL SPIDER
7. LOWER DIFFERENTIAL GEAR
8. CONSTANT SPEED MOTOR AND DISK
9. FRICTION ROLLER AND PINION
10. LEAD SCREW DRIVING MOTOR
11. YOKE
12. LEAD SCREW
Figure 2-11. Cutaway view of master speed indicator.
16
assembly which is mounted on the differential shaft.
2F4. Slip ring and contact assembly. The
slip ring and contact assembly turns with the
spider and the differential shaft. This causes
one of the contact points to push up against
one side of the contact of the follow-up
contact assembly, which is frictionally
mounted on the follow-up shaft. Closing this
contact shorts out one of the shading coils
of the lead screw driving motor, causing the
motor to run in one of two directions, depending on which shading coil is shorted out.
2F5. Lead screw driving motor. The lead
screw driving motor is geared to the lead
screw. As the motor turns the lead screw,
the yoke assembly which is meshed with the
lead screw, moves upward or downward on
the lead screw, depending on which way the
screw is turning. The friction roller and
roller shaft and pinion which are mounted in
the lead screw yoke also move with the yoke.
2F6. Constant speed motor and friction disk.
The constant speed (synchronous) motor is
energized, by a 60-cycle controlled frequency
a.c. The current is obtained from the constant
frequency supply unit in the ship. Through
gearing, this motor operates a slow speed
shaft on which a spider and disk assembly is
mounted. The disk turns at 100 rpm. A spring
arrangement keeps the disk in positive contact
with the friction roller. When the roller is
at the center of the disk it will not revolve,
because of its central position. As the roller
is moved away from the center of the disk
by the action of the lead screw, it rotates at
an increasing speed. Its revolutions are
transmitted through the roller shaft and
pinion to a spur gear which carries the lower
differential gear. When the speed of the lower
differential gear equals the speed of the
upper differential gear, the spider stops revolving. This causes the follow-up contact to
open, and the lead screw driving motor stops.
The roller stays in one position on the disk
until a change occurs in the ship's speed.
2F7. Anti-hunting mechanism. When the two
differential gears are revolving at the same
speed, and the differential spider and shaft
stop moving, the contacts are still closed
lightly. This would cause the lead screw
motor to move the roller beyond the desired
point, and hunting of the pointer would result due to the contact arm hitting first one
contact point and then the other. To control
this, a gear driven by a pinion at the extreme
top end of the lead screw, drives the center
contact very slowly in the same direction as
the differential shaft. This will open the
contacts just before the differential: shaft
stops moving, allowing final adjustment to
the exact balance point.
2F8. Speed transmission. A full revolution
of the pointer measures the speed of the
ship from 0 to 25 knots. As the lead screw
turns, the worm at the upper end of the lead
screw turns a worm gear which moves the
pointer to indicate- speed in knots. The rear
end of the pointer shaft is connected to a
self-synchronous transmitter which electrically transmits the speed in knots to the speed
and distance indicator, the torpedo data computer, and the gyrocompass speed corrector.
G. SPEED AND DISTANCE INDICATOR
2G1. Speed and distance indicator. The
speed and distance indicator (Figure 2-12) is
located in the conning tower. The unit consists of two self-synchronous repeaters, a
counter, a dial and pointer. Speed is received from the master speed indicator self-synchronous transmitter, and distance is received from the transmitter in the rotary
distance transmitter. The shaft of the large
repeater self-synchronous motor carries the
speed-indicating pointer. The function of
the counter is to repeat the number of nautical miles traveled. The indicator dial is illuminated by three Navy type TF 53 lamps,
which are rheostat-controlled by an exterior
knob. The complete mechanism can be removed from the case as a unit.
17
Figure 2-12. Cutaway view of speed and distance indicator.
18
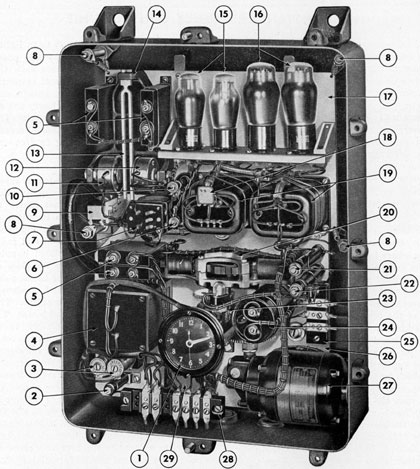
H. CONSTANT FREQUENCY CONTROL UNIT
2H1. Constant frequency supply unit. Older
type submarines are equipped with a constant
frequency supply unit (Figure 2-13). Recently commissioned submarines derive their
constant frequency supply from the ship's
regular a.c. supply. The Pitometer rotary
balance unit is composed of two parts: the
converter which changes d.c. to a.c. of a constant frequency of 60 cycles per second at 115
volts, and the control unit which controls the
output of the converter to maintain a constant
frequency. Constant frequency voltage is
supplied to the constant speed motor which
drives the friction disk assembly in the master
speed indicator, and to the shaft revolution
indicator.
2H2. Converter. The converter consists of
an armature having its d.c. and a.c. windings
in the same slots of the armature core. The
d.c. windings connect to the commutator on
one end of the armature, and the a.c. windings
connect to two collector rings on the opposite
end of the armature. The converter is prevented from rotating more than 1750 rpm until
speed control is taken over by the control
unit by a speed regulator assembly. This
speed regulator consists of a rotating disk
on which are mounted two electrical contacts.
When the disk tends to rotate more than
1750 rpm, the contacts are opened by centrifugal force, and the converter slows down.
When the converter begins to drop slightly
below 1750 rpm, the contacts close. This action tends to keep the converter operating at
a substantially constant speed. When the control unit takes over control of the speed of
the rotary converter, it holds it at 1800 rpm.
2H3. Control unit. The control unit consists of an electrically driven tuning fork, an
amplifier circuit to amplify the tuning fork
frequency, a phonic wheel motor assembly
which is driven at a constant speed by the
tuning fork impulses, a differential gear assembly, a rheostat, a synchronous motor, and
an electric clock.
2H4. Electric clock. The clock operates on
60-cycle a.c. supplied by the converter, and is
a means of checking frequency.
2H5. Rotor (stroboscope). A neon light is
mounted beneath the rotor in the phonic
wheel motor. This light flashes each time
the tuning fork vibrates. Visual inspection
of the rotor, when operating, should show
the white marks on the rotor clearly and distinctly. This indicates that the impulses from
the tuning fork are being amplified correctly
and that the rotor is rotating in frequency
with the fork frequency.
2H6. Operation of constant frequency supply.
When the constant frequency supply unit is
energized, the starting magnet starts the
tuning fork vibrating. These impulses are
amplified and picked up by the pick-up phone,
where they are further amplified and fed to
the driver phone. These amplified impulses
keep the fork vibrating. The impulses are
also picked up by the amplifier tubes, power
tubes, transformers, chokes, and condensers
which further amplify the impulses. They
are then fed to the phonic wheel motor. This
motor is attached through gearing to the
upper differential gear, which is free to rotate:
on the differential shaft. Two differential
pinion gears attached to the spider are meshed
with the upper and lower differential gears,
and are free to rotate with these gears. The
spider is rigidly attached to the differential
shaft. The lower differential gear is also free
to rotate on the differential shaft, and is
driven by a synchronous motor which rotates
at the same speed as the converter armature.
The lower end of the differential shaft is
connected through spur gears to a rheostat
shaft. The rheostat shaft controls the rheostat contact arm, which in turn regulates the
converter field current, increasing or decreasing the speed of the converter armature, and
thereby the output frequency of the converter.
If the frequency of the controlled 60-cycle
a.c. supplied by the converter should drop,
the speed of the synchronous motor driving
the lower differential gear would also drop.
The upper and lower differential gears would
not be rotating at the same speed. Consequently the spider and shaft would turn in the
direction of the faster moving gear. The rheostat
Figure 2-13. Constant frequency control unit, cover removed.
20
arm is turned so as to insert more resistance in the converter field circuit, thereby
increasing the speed of the converter and of
the synchronous motor. When the lower
differential gear is rotating at the same speed
as the upper differential gear, the spider and
shaft stop turning; the rheostat arm remains
stationary until further change in frequency
occurs. When the upper and lower differential gears are rotating at the same speed,
the output frequency of the converter is
exactly 60 cycles.