This chapter will introduce some of the numerous devices that may be used to control the flight of a guided missile. We will discuss four types of control systems: pneumatic, pneumatic-electric, hydraulic -electric, and electric. Throughout the chapter we will deal with general principles, rather than the actual design of any specific missile.
5A2. Definitions
A missile GUIDANCE system keeps the missile on the proper flight path from launcher to target, in accordance with signals received from control points, from the target, or from other sources of information. The missile CONTROL system keeps the missile in the proper flight attitude. For example, the missile axis must lie along the desired trajectory, rather than at an angle. The missile must be roll stabilized; that is, a fixed plane through the missile axis must remain parallel to a fixed reference plane outside the missile. Flight attitude stabilization is absolutely necessary if the missile is to respond properly to guidance signals. For example, assume that the missile has rolled 90 degrees clockwise from the proper attitude. Now, if it receives a "right turn" command from the guidance system, operation of the control surfaces will actually turn the missile downward, rather than to the right. But if the control system keeps the missile in the proper attitude, guidance signals will be correctly interpreted, and will produce the desired correction in the missile flight path.
When the control system determines that a change in missile attitude is necessary, it makes use of certain controllers and actuators to move the missile control surfaces. The guidance system, when it determines that a change in missile course is necessary, uses these same devices to move the control surface. Thus the guidance and control systems overlap. For convenience, we will assume that the controllers and actuators are a part of the control system, rather than the guidance
system. We can therefore say that the output signals from the guidance system are put into effect by a part of the control system.
To summarize: the missile control system, discussed in this chapter, is responsible for missile attitude control. The guidance system, discussed in chapter 6, is responsible for missile flight path control.
5A3. Purpose and function: basic requirements
The control system is made up of several sections that are designed to perform, insofar as possible, the functions of a human pilot. To accomplish this purpose, the control surfaces must function at the proper time and in the correct sequence. For example, in driving your car, you remember that you must make a turn at a certain distance from the starting point. You therefore anticipate the turn. In a missile control system, the remembering is done by INTEGRATING DEVICES and the anticipation is done by RATE DEVICES. These devices will be described later.
The first requirement of a control system is a means of a sensing when control operations are needed. The system must then determine what controls must be operated, and in what way. For example, the system may sense that the missile nose is pointing to left of the desired course. Obviously, right rudder is required. (Other missiles may make use of different control surfaces.) The length of time rudder control is needed depends on the size of the error. Should the attitude deviation be to one side and also either up or down, simultaneous action by rudder and elevator controls would be needed.
5A4. Factors controlled
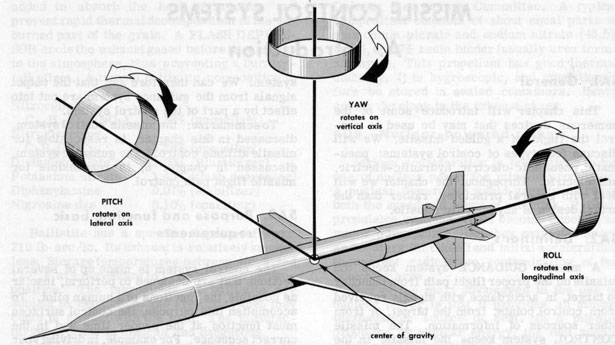
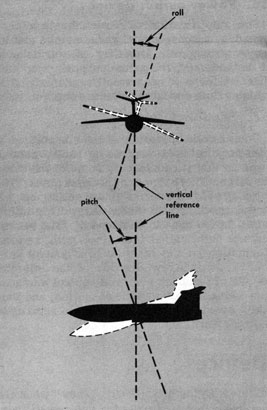
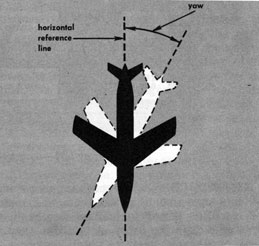
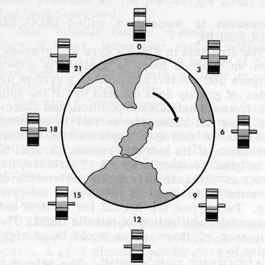
Missile course stability is made possible by devices which control the movement of the missile about its three axes. The three flight control axes are shown in figure 5A1. These are the pitch, yaw and roll axes.
66
Figure 5A1.-Three control axes of a missile.
PITCH. In certain missiles, pitch control is obtained by the use of elevators similar to those used on light airplanes. Other methods will be described in the next section of this chapter. For the present, it is sufficient to say that pitch control means control of the up-and-down movements of the missile, as shown in the illustration.
YAW. Missile movement about the yaw axis is controlled by the rudder. Other methods for controlling yaw will be covered in the following section of this chapter.
ROLL. Roll deviations are controlled by differential movements of rudders, elevons, or other flight control surfaces.
5A5. Methods of control
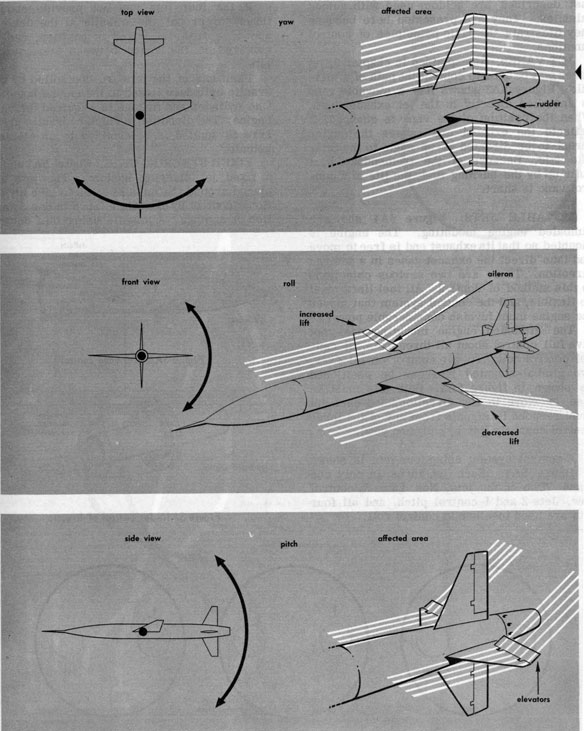
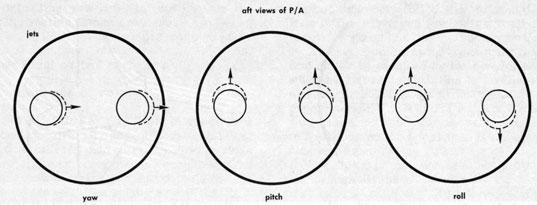
CONTROL SURFACES. The primary control surfaces of aircraft, and of some missiles, are rudder, aileron, and elevator. The functions of these surfaces are shown in figure 5A2. The top view shows how the rudder controls the direction of travel. The rudder is attached to a section of the tail structure called the vertical stabilizer. In addition to course control, the
rudder is also used in yaw stabilization of the plane or missile.
The center view of figure 5A2 shows how the ailerons can control roll. The ailerons are attached to the trailing edges of the main lifting surfaces. When one aileron is lowered, the opposite aileron is raised. Usually, the ailerons are coupled to other surfaces in such a manner that good roll control is obtained.
The elevators are attached to a section of the tail assembly called the horizontal stabilizer. The elevators give pitch control; both elevators go up and down simultaneously.
A study of the drawings will show that control action is obtained by the control surfaces when they present opposition to air flow in such a manner that a force is produced. This force, pushing against the control surface, causes the wing or tail to which the surface is attached to move in a direction opposite to the control surface movement.
But this type of control is not suitable for use at high altitudes, because the air is so thin that it produces very little force against the control surfaces. High speeds introduce other problems so that the basic control surfaces
67
Figure 5A2.-Functions of primary control surfaces.
68
just described are seldom used with guided missiles. They are presented here because they illustrate the basic principles of control functions.
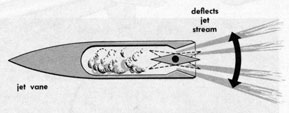
JET VANES. As explained in chapter 2, jet vanes maybe used to control the path of a missile. Figure 5A3 shows how a movable vane is installed directly in the jet exhaust path. When the position of the vane is changed, it deflects the exhaust and causes the engine thrust to be directed at an angle to the missile axis. Because of the tremendous heat built up by the burning fuel, the life of a control vane is short.
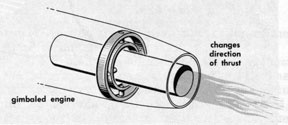
MOVABLE JETS. Figure 5A4 shows a gimbaled engine mounting. The engine is mounted so that its exhaust end is free to move and thus direct the exhaust gases in a desired direction. There are two serious objections to this method of control. All fuel lines must be flexible, and the control system that moves the engine must furnish considerable power.
The gimbaled engine mounting does not give full control about all three axes. It cannot control roll. To get control on all axes, two gimbal-mounted jets can be positioned as shown in figure 5A5. Both jets must be free to move in any direction, and each jet must respond to signals from any of the three control channels (pitch, roll, and yaw).
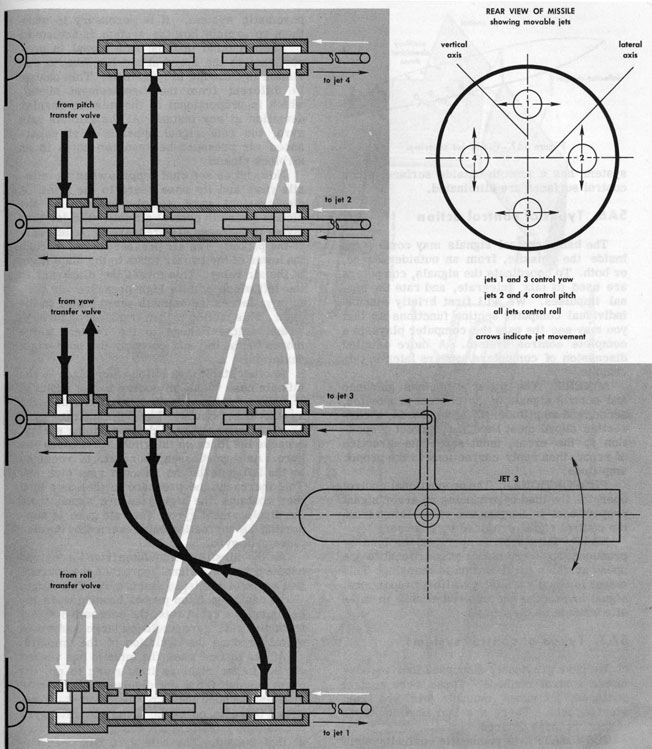
A control system using four jets is shown in figure 5A6. Each jet turns in only one plane. Two of the jets, Nos. 1 and 3, control yaw. Jets 2 and 4 control pitch, and all four jets are used together to control roll.
If the four jets can not provide enough thrust to propel the missile at the desired speed, a fifth jet, fixed in position, can be centered in the space between the movable jets.
Positions of the jets are controlled by hydraulic cylinders linked to the engine housing. One cylinder and linkage is required for each engine. The direction in which hydraulic pressure is applied is determined by an electric actuator.
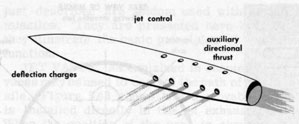
FIXED STEERING JETS. Figure 5A7 shows a fixed jet steering system. The jets are placed around the missile so as to give directional control by exerting a force in one direction or another. A missile using this control
Figure 5A3.-Jet vane control
Figure 5A4.-Jet control of direction.
Figure 5A5.-Control by two jets.
69
Figure 5A6.-Four movable jet control.
70
Figure 5A7.-Fixed jet steering.
system has a smooth outside surface, since control surfaces are eliminated.
5A6. Types of control action
The basic control signals may come from inside the missile, from an outside source, or both. To coordinate the signals, computers are used to mix, integrate, and rate the signal impulses. We will first briefly discuss individual computer section functions so that you may see the part the computer plays in a complete control system. A more detailed discussion of computers appears later in this chapter.
MIXERS. The mixer combines guidance and control signals in the correct proportion, sense, and amplitude. In other words, a correction signal must have the correct proportion to the error, must sense the direction of error, then apply corrections in the proper amplitude.
PROPORTIONAL. The proportional control operates the load by producing an error signal proportional to the amount of deviation from the control signal produced by a sensor.
RATE. Rate control operates the load by producing an error signal proportional to the speed at which the deviation is changing. This output is usually combined with a proportional signal to produce the desired change in missile attitude or direction.
5A7. Types of control systems
We have previously discussed four aerodynamic control methods. These were control surfaces, jet vanes, movable jets, and fixed steering jets. There are four basic methods of moving these devices.
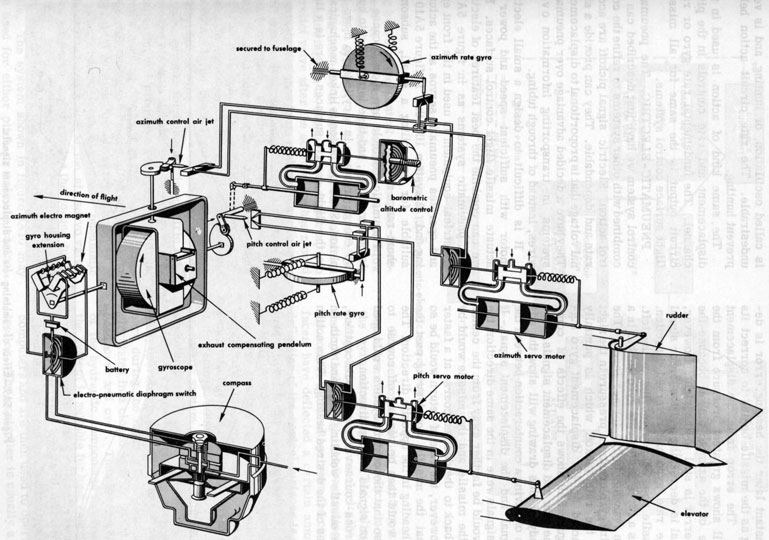
PNEUMATIC. A pneumatic control system is shown in figure 5A8. (Some of the operating controls shown are not directly a part of the
pneumatic system. It is necessary to show them to explain how the system is actuated.)
Keep in mind that the rate signal is proportional to the speed at which a missile deviation is changing in magnitude. This change is different from the displacement signal, which is proportional to the missile angular deviation at any instant. At the azimuth rate gyro, the rate signal appears as an unbalanced air pressure between two holes in an airblock pickoff.
Now, let us see what happens when the missile yaws and its nose veers to the right. A displacement gyro signal develops at the pickoff (azimuth control air jet). The jet then pivots to increase air pressure in the left hole of the pickoff. The air pressure is fed through the lower of the two air tubes to the diaphragm of the air relay. This forces the diaphragm to the left which admits high-pressure air that, in turn, forces the azimuth servo motor to the right. This motion is then transferred through a mechanical linkage to the rudder, which moves to the left and corrects the nose-right deviation.
Another stabilizing action takes place as the missile nose veers off course to the right. A signal is produced by the azimuth rate gyro as the nose moves. The azimuth rate gyro exerts a force on the right restraining spring, because the force on the gimbal precesses the gyro. As it precesses, more air is received by the left hole of the azimuth rate pick off. This increases the pressure in the same tube that contains the high pressure signal from the displacement gyro. The rate gyro is supporting the correction being exerted by the displacement gyro.
As the missile path deviates from its desired heading, the rate signal increases the corrective action of the displacement gyro. Therefore, if the deviation from proper heading were increasing at a rapid rate, the corrective signal from the rate gyro would be large and would quickly reduce the deviation of the missile.
At the instant when the missile has veered as far to the right as it is going to go, the error signal from the displacement gyro is greatest because the error is greatest. However, there is no signal from the rate gyro because the missile is not changing its heading at that instant. The rate gyro has been returned to its mid-position by the restraining springs.
71
Figure 5A8.-Pnuematic control system.
72
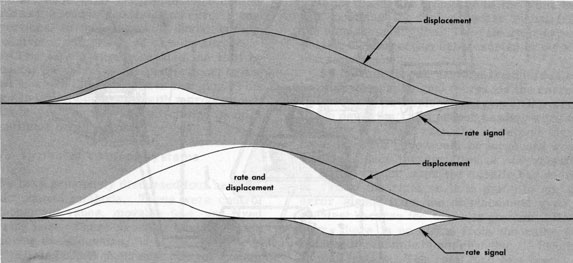
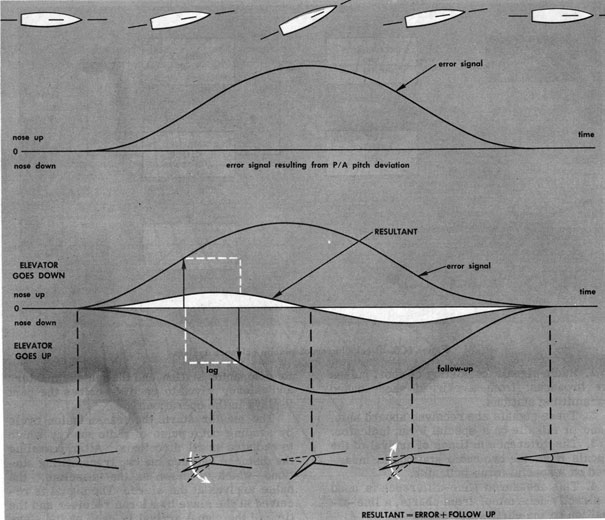
An instant later the heading error is decreasing as the missile begins to correct its heading. The error from the displacement gyro still shows greatest pressure from the left hole of the azimuth pickoff because the heading error is still to the right. However, the signal is decreasing and the error signal from the rate gyro has reversed direction. The missile nose is now moving to the left. This puts a force on the rate gyro gimbal in a direction opposite to the former force. The precessing gyro creates a pressure in the right hole of the rate pickoff which is partially counteracted by the displacement gyro signal. Figure 5A9 shows the effects of combining the rate and displacement signals.
A study of this drawing will show the advantages of having a counteraction between the rate signal and the displacement signal. If the two signals were in the same direction, the rudder would be farther away from the center axis of the missile and the missile would be heading back to the desired course at a faster rate. However, the rate of return would be so rapid that the missile would swing past the correct heading in the opposite direction. The missile would then be veering off course to the left so that the control system would need correction signals for that direction.
The cross-course variations would continue, with the missile wobbling back and forth on both sides of the desired heading. This action
is called oscillation, or hunting, and is very undesirable. The rate circuit action helps prevent hunting.
The same kind of action is used in the displacement and rate controls in the pitch channel. The fundamental rate gyro or rate circuit output is the same for all missile flight surface control systems.
PNEUMATIC-ELECTRIC. The pneumatic control system we have just described can be combined with other systems to refine the control action. Electric signal pickoff are accurate and dependable. They can provide a signal voltage that is proportional to displacement. They have a decided advantage over pneumatic systems in transporting information over wires, instead of through tubing.
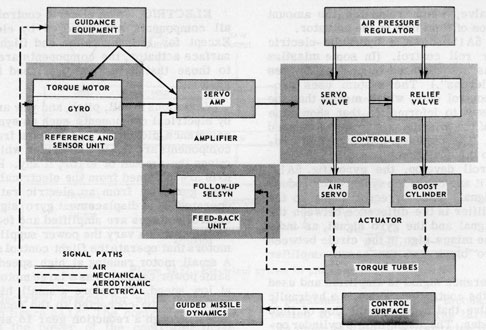
It is difficult to design a small electric motor with sufficient speed and power to actuate missile flight control surfaces. But we can combine the best features of electric and pneumatic systems as in figure 5A10. Electrical equipment is used in the front end, and operates pneumatic servos at the actuating end. A system like that in figure 5A10 is suitable for controlling a small, subsonic, short-range missile.
Pneumatic controls are slow because air is compressible, and time is required to build up enough pressure in a cylinder to move the piston. Since the piston is linked mechanically to the flight control surfaces, there is a time
Figure 5A9.-Effect of combining rate and displacement signals.
73
Figure 5A10.-Pneumatic-electric control systems.
lag between the control signal and the movement of the control surface. But the slow response can be speeded up by adding a booster cylinder, as shown in figure 5A10.
The increase in response speed is obtained by allowing air to escape, through ports, into a relief valve after the servo valve has moved a certain distance from midposition. The relief valve lets high-pressure air into the boost cylinder, which then acts in parallel with the actuator cylinder to move the flight control surfaces. The additional force provided by the boost cylinder makes it possible to obtain large control surface deflections in either direction.
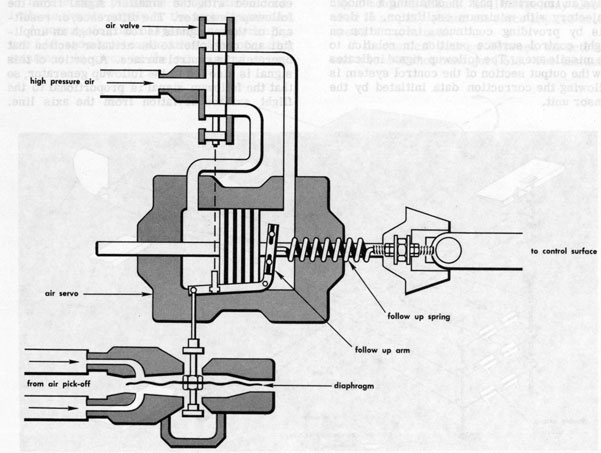
The sensors for a pneumatic-electric system are electric pickoffs that detect gyro displacement and produce a voltage proportional to the heading deviation angle. This voltage is small, and must be amplified before it can operate a solenoid and air servo valve.
The change from electric to pneumatic operation takes place at the air servo valve. The air servo motor rotates the torque tubes which are connected to the control surfaces and extend into the center section of the missile. The system shown in figure 5A10 may be used for either pitch or azimuth control.
The servo amplifier receives a followup signal from the control surface, in addition to the gyro error signal. The voltage signal voltage is fed back with a polarity that opposes the input voltage. The feedback voltage cancels the control input voltage when the control surfaces have deflected a certain amount. The deflection of the control surfaces is therefore proportional to the input signal.
HYDRAULIC-ELECTRIC. This combination is similar to the pneumatic-electric, except that the actuators are moved by hydraulic fluid pressure instead of air pressure. This removes some of the disadvantages of a pneumatic system, since the fluid is not compressible.
In a hydraulic-electric system, a continuously operated pump maintains hydraulic pressure during the flight. The hydraulic fluid is circulated in a closed system, so that it can be used over and over. Thus the operating time of the hydraulic components is unlimited, and the system is suitable for long range missiles.
Variations in pitch, roll, and yaw are sensed by gyro reference units with electric pickoffs. The pickoff voltages are fed to amplifiers and computers and are then used to operate a controller. The controller is usually a hydraulic
515354 O-59-6
74
transfer valve, which regulates the amount and direction of fluid flow to the actuator.
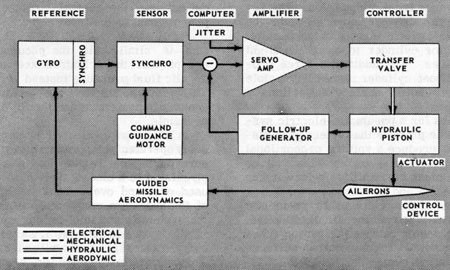
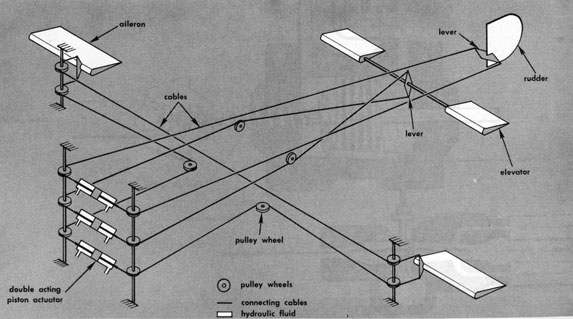
Figure 5A11 shows a hydraulic-electric system for roll control. (In some missiles the ailerons are replaced by control devices called "rollerons".) The system uses proportional control only, which means that the controls react to information that shows the deviation of the missile axis from the desired flight path. The displacement signal is proportional to the deviation.
Should roll develop, the gyro (fig. 5A11) will detect it and cause the synchro to produce an error signal. The correction signal to the servo amplifier is the difference between the followup signal and the gyro signal, as indicated by the minus sign in the circle between the synchro block and the servo amplifier triangle.
The difference signal is amplified and used to operate the controller, which is a hydraulic transfer valve that regulates the flow of fluid to the cylinder. The piston in this cylinder operates the ailerons (rollerons; controllable jets; etc.) through mechanical linkages.
The equipment represented by the block labeled "jitter" provides an a-c voltage with a frequency of about 25 cycles per second. This is applied to the transfer valve and other equipment, to keep them in constant vibration and prevent the friction that may develop when the parts are not moving.
ELECTRIC. In an electric control system, all components are powered by electricity. Except for the controller and flight control surface actuator, the components are similar to those that have been described for other systems.
Variations in roll, pitch, and yaw are sensed by electrical components such as synchros or reluctance pickoffs. The signals from these components are fed to a computer which determines the amount of error, if any. Rate signals are obtained from the electrically driven rate gyro, or from an electric rate circuit operated by a displacement gyro signal. The control voltages are amplified and fed to controllers, which vary the power supplied to the motors that operate the flight control surfaces. A small motor running at high speed has the same power capability as a large motor running at low speed. Therefore a small, high-speed motor can be connected to the control surfaces through a reduction gear to secure the necessary torque.
A constant-speed motor, operating through a clutch, is best suited for rapid control operation, because the gear train inertia tends to cause an undesirable lag in control surface response. The lag may be great enough to make the missile oscillate about the desired trajectory. The use of a clutch helps to overcome this effect.
Figure 5A11.-Hydraulic-electric system for roll control.
75
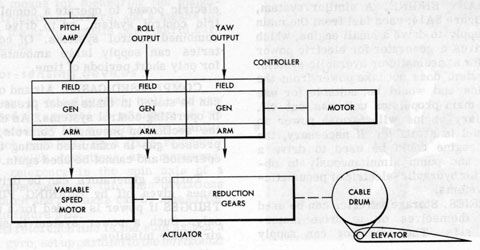
Figure 5A12.-Electrical system for pitch control.
An electrical system for pitch control is shown in figure 5Al2. The controller section converts the power of the controller drive motor to power for the three-channel variable-speed motors. These motors operate when a signal is received from the amplifiers. Let us assume that the pitch amplifier furnishes a signal. This signal is applied in such a way that the magnetic field of the pitch generator is increased. This causes the generator to develop an output voltage, which is fed to the variable-speed motor. The shaft of the variable speed motor then begins to turn, putting an additional load on the controller drive motor.
The speed of the controller drive motor must remain reasonably constant, regardless of loading. Otherwise, if the pitch output decreases, the speed of the motor would decrease; this would result in decreased output from the roll and yaw generators at the same time. As a result, there would be undesirable cross-coupling between control channels so that the pitch signal would affect other channels, and vice versa.
5A8. Energy sources
The energy required to operate the control surfaces may be taken from any of the following sources.
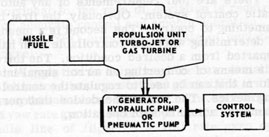
MISSILE ENGINE. The propellant of the missile may be used as a source of energy to operate the control system. Figure 5A13 shows how a generator, a hydraulic pump, or
a pneumatic pump may be mechanically connected to a turbo-jet or gas turbine engine. If a pump is used, it will provide the pressure needed for a hydraulic or pneumatic system. A power source of this type is practical even though some of the power developed by the engine is used to drive accessory equipment. There is ample power left for thrust.
Figure 5A13.-How energy is obtained from the missile engine.
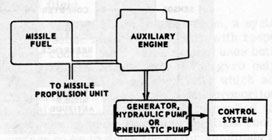
Figure 5A14.-Auxiliary engine power.
76
AUXILIARY ENGINE. A similar system, shown in figure 5A14, uses fuel from the main missile supply to drive a small engine, which in turn drives a generator for electric power or a pump for a pneumatic or hydraulic system.
This system does not take power from the main engine and would be suitable for use when the main propulsion unit was cut off. The auxiliary engine will furnish power so long as fuel is available. If necessary, the auxiliary engine could be used to drive a generator and pump simultaneously to obtain power for hydraulic-electric or penumatic-electric systems.
BATTERIES. Storage batteries can be used either by themselves or to drive motor-generator sets. The generator can supply
electric power to operate a completely electric control system, or to drive pumps for combined control systems. Of course, batteries can supply large amounts of power for only short periods of time.
COMPRESSED GASES. Air and other gases can be stored in tanks under pressure for use in operating control systems. As explained in the section on pneumatic controls, the compressed gas is exhausted during the control operation and cannot be used again.
Turbine generators can be driven by the gases given off by BURNING FUEL CARTRIDGES if power is needed for a short time only. Such a power system is suitable for air-to-air missiles.
B. Requirements of a Missile-Control Servo System
5B1. General
Missile control is similar to any automatic control function. The system corrects some controllable quantity, and then checks the results as a basis for further corrections.
There are four requirements of any automatic control system. Obviously, the first is something to control. The second is a means of determining when any controllable item has departed from a desired condition. The third is a means of converting an error signal into a form that can be used to regulate the controlling device. The last is the device that performs the actual control operation.
5B2. Controllable factors
Factors that must be controlled by the missile control system are pitch, roll, and yaw. The system must provide a means of determining when the missile has departed from the desired attitude. Deviations are sensed by gyros. Electrical, mechanical, and electronic components are interconnected to form a complete control system.
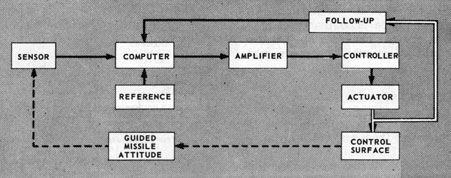
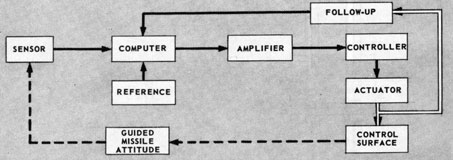
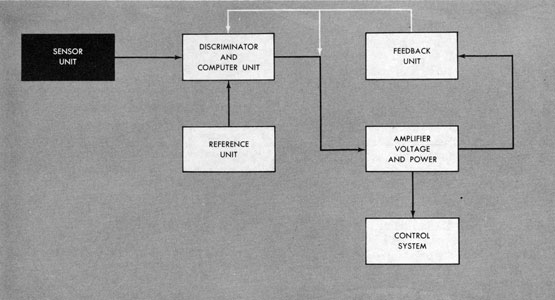
The control system shown in figure 5B1 can set up fixed reference lines in space, from which deviations in attitude can be measured. It provides a mechanical and electrical means for operating the missile flight control
Figure 5B1.-Block diagram of missile control system.
77
surfaces, a means for measuring the magnitude and direction of errors, and a means for translating the error signals into control surface movement.
5B3. Error-sensing devices
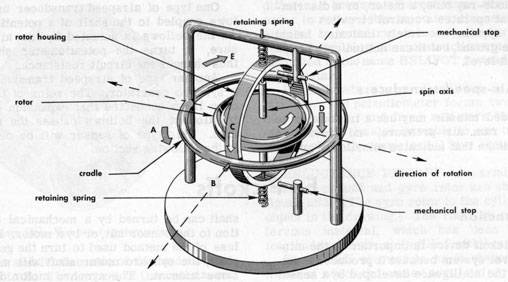
Deviations in missile pitch, roll, and yaw are detected by gyros. A minimum of two gyros is necessary for missile flight stabilization. Each gyro sets up a fixed reference line from which deviations are measured. One such reference is the spin axis of a vertical gyroscope; from this axis deviations about the pitch and roll axes can be measured, as shown in figure 5B2.
A second reference line is the spin axis of a horizontal gyro, set up parallel to the horizontal axis of the missile as shown in figure 5B3.
Gyros used for missile control applications are divided into two classes: gyros used for
Figure 5B2.-Vertical reference line.
Figure 5B3.-Horizontal reference line.
stabilizing (control) purposes and gyros used for both guidance and stabilization. If turns or other maneuvers are necessary, a third gyro is required so that there will be one gyro for each sensing axis.
In addition to the control signals from the vertical and horizontal gyros, which are proportional to the deviation of the missile from the desired trajectory, a signal that is proportional to the rate of deviation is required for accurate control and smooth operation. A RATE GYRO furnishes the rate of deviation signal.
A gyro that is being used for rate deviation indications has a restricted gimbal that is free to rotate about one axis only. The spin axis of a yaw rate gyro is mounted parallel to the missile line of flight. The roll rate gyro spin axis is parallel to the missile pitch axis, and at right angles to the line of flight. The pitch rate gyro spin axis is parallel to the yaw axis of the missile and at right angles to the line of flight.
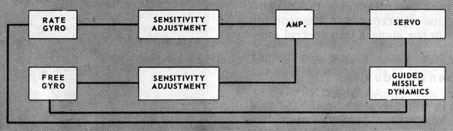
Figure 5B4 shows, in block form, a system used to sense motion of a missile with respect to one control axis. This system uses both a rate gyro and a free gyro. The gyro output signals are fed to an amplifier, which adds them and gives an output voltage proportional to their sum. This voltage is applied to a servo motor, which positions the flight control surface so as to drive the error amplitude and the rate of change toward zero.
78
Figure 5B4.-A control channel using rate and free gyros.
TRANSDUCERS. A transducer is a device which is operated by power from one source and supplies power to another device in the same or a different form. A familiar example is the phonograph pick-up which converts the lateral motion of the needle in a record groove to electrical impulses which are then amplified. In most missile applications, a transducer is used in a similar manner-to change mechanical motion to an electrical voltage. More information on transducers will be given later in this chapter.
5B4. References
In order to accurately determine errors, the complete control system must have reference values built in. The system is then capable of sensing a change, comparing the change to a reference, determining the difference, then starting a process that will reduce the difference, to zero.
The reference units in a missile control system are of three kinds-voltage references, time references, and physical references. A more detailed discussion of references will appear in the next section of this chapter.
5B5. Correction-computing devices
We have shown that sensor units detect errors in pitch, roll, and yaw, and that a reference unit furnishes a signal for comparison with the sensor output.
Although the sensor output represents an error to be corrected, it is seldom used to operate control surfaces directly. It must be changed to include additional information, and then amplified in order to operate the controls. These operations are represented by the block labeled "computer" (fig. 5B1). The computer section is normally composed of mixers, integrators, and rate components.
5B6. Power output devices
The amplification of error signals is performed by a conventional vacuum-tube amplifier or a magnetic amplifier. Regardless of the method used, the prime purpose of an amplifier is to build up a small sensor signal to a value great enough to operate the controls.
5B7. Feedback loops
For smooth operation of the controls, it is necessary to feed back some of the control power so that it counteracts some of the original force. There are two feedback paths. The major path represents information on the angular movement of the missile. This information is fed back to the sensor. The second feedback path, called the minor path, returns information on the reaction of a control surface, rather than the reaction of the missile. The use of feedback prevents control surfaces from swinging to the limit of motion, and thus avoids overshooting as the missile returns to the proper attitude.
C. Reference Devices
5C1. Purpose and function
The reference device provides a signal for comparison with a sensor signal, so that
equipment in the missile will "know" when the missile has deviated from the desired attitude. Figure 5C1 shows how the reference section is connected to the computer section. If the
79
reference section were omitted from the control section, the computer would be unable to set up correction signals.
5C2. Types of reference
In the following discussion, the three types of reference signals will be described separately to show how each type functions in the complete control system.
VOLTAGE. In some control systems, the ERROR SIGNALS are in the form of an a-c voltage which contains the two characteristics necessary to make proper corrections in the flight path. These are the amount of deviation, and the direction of sense of the deviation.
The amount of deviation maybe indicated by the amplitude of the error signal so that, as the deviation increases, the amplitude increases; and if the deviation decreases, the amplitude decreases. Therefore, when the missile attitude has been corrected and there is no longer a deviation, the error signal amplitude drops to zero.
The direction of deviation may be carried by the a-c signal as a phase difference with respect to the phase of a reference signal. Only two phases are required to show direction of deviation about any one control axis. When a phase-sensitive circuit, such as a discriminator, is used to compare the error signal with the a-c reference signal, the direction of error is established and the output containing this information is fed to other control sections.
In most cases, the a-c reference voltage is the a-c power supply for the control system. It also furnishes the excitation voltage for the sensor unit that originates the error signal.
The controller unit (fig. 5C1) usually requires a d-c signal, which must include the information contained in the original error signal. The amplitude of the d-c signal shows the amount of deviation. The direction of deviation is indicated by the polarity of the d-c signal. To keep the d-c signal from becoming so large that it would cause overcontrol, a LIMITER CIRCUIT is used. Limiters require a d-c reference voltage, and function as a part of the reference unit.
TIME. The use of time as a reference is familiar to everyone. One common application is in the automatic home washer. A clock-type motor drives a shaft, which turns discs that operate electric contacts. These contacts close control circuits that operate hot- and cold-water valves, start and stop the water pump, change the washer speed, spin the clothes dry, and finally shut off the power. Each operation runs for a specified time interval. This kind of timer can be used for certain missile control operations.
Timer control units vary considerably in physical characteristics and operation. All of them require an initial, or triggering, pulse. Since all timers in a complete system are not triggered at the same time, each must have its own trigger. This is usually an electrical signal. It may be fed to a solenoid which mechanically triggers the timing device.
Another triggering method involves the application of an electrical signal to a heater coil which heats a bimetal strip and causes it to bend, thus opening or closing electrical contacts. This method maybe more familiar when you contemplate the operation of a typical thermostat like the one found in the home. Still another triggering method is to apply an
Figure 5C1.-Basic missile control system.
80
electrical signal to a motor. The motor, which is apart of a timing device, then starts the control sequence in much the same manner in a home washer.
Mechanical timers are used in some missile control systems. In operation, these timers are similar to mechanical alarm clocks. The energy is stored in a main spring. If a mechanical timer is used in a missile, the clock mechanism is not started until the missile is in flight, and therefore some form of triggering linkage is necessary. This usually consists of a catch that can be released by a solenoid. Since the spring cannot be rewound after the missile has been launched, a mechanical timer can be used only once during a flight.
Electrical timers in missile control systems are divided into motor types and thermal types. The triggering of either type is done by
an electrical signal, and the time interval begins when the trigger voltage is applied. A simple motor timer is shown in figure 5C2. The speed of the motor shaft is reduced by the gear reduction box so that the output shaft revolves at the speed needed to time the operation.
An arm connected to the output shaft serves as part of a switch contact system. The length of time required for the arm to travel from the starting position to the point where contact is made is the delay time of the unit. Normally, this mechanism is used only once during a missile flight. If recycling is necessary, a more complex unit is required.
Thermal delay tubes and relays may also be used to control time delay actions. Thermal delay devices have the advantage over clock timers in that they can be made to recycle
Figure 5C2.-Simple motor timer.
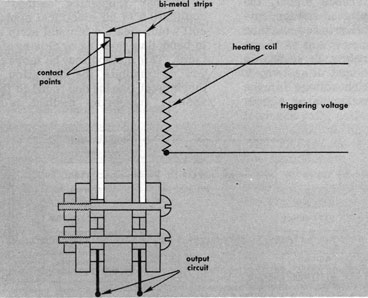
Figure 5C3.-Thermal delay tube.
81
without additional circuitry or mechanisms. However, they do not have the accuracy of clock timers.
One type of thermal delay tube is shown in figure 5C3. Its components are the two bimetal strips, the contacts, a heating coil, and the strip supports. When a triggering voltage is applied, the heating coil heats ONE of the bimetallic strips. As the temperature rises, the strip deforms and its contact moves toward the other contact. When the bimetal strip has heated sufficiently, the contacts touch and the output circuit is completed.
The amount of time between application of the triggering voltage and closing of the contacts is determined by the contact spacing, the temperature characteristics of the metals in the strips, and the characteristics of the heater coil. The delay time is preset by the manufacturer; the assembly is then placed in a tube-type enclosure, and the air is pumped out of the tube. This type of construction prevents any adjustment of the time delay.
The effect of ambient temperature variations can be avoided by making both strips of the same metals. Then, when one strip deforms
because of outside temperature effects, the other strip deforms the same amount in the same direction. This maintains a more or less constant spacing between the contacts.
PNEUMATIC. Pneumatic timers may be used in certain missile applications. Time delay action is obtained by compressing air in a cylinder and then allowing the air to escape through a small orifice.
There are two general types of pneumatic timers-piston and diaphragm. The piston type is shown in figure 5C4. The felt washer acts as an air seal. As the plunger is pulled up, the spring is compressed and the contacts are opened. The spring is held in compression by the inertia block.
The inertia block forms the trigger for the timer. The block is of metal and will be thrown backward when it is subjected to sufficient accelerations. Thus, when a missile is launched, the block will fly back and release the catch that holds the spring under compression. Spring pressure will then push the piston downward, forcing air out through the orifice. The orifice opening may be changed by adjusting the needle valve. The smaller the orifice,
Figure 5C4.-Piston-type pneumatic timer.
82
Figure 5C5.-Diaphram-type pneumatic timer.
the longer it will take the piston to come down far enough to close the contacts.
The diaphram-type pneumatic timer, shown in figure 5C5, operates on essentially the same principle as the piston-type timer that has been described.
Most missile control systems use some form of timer. Remember that an individual timer may be used to start a variety of control functions. Sometimes a timer is used strictly as a safety device.
PHYSICAL REFERENCES. There are a number of references for missile control systems other than the voltage and time classifications we have discussed. The remaining types have been grouped under the heading of physical references. They include gyros, pendulums, magnetic devices, and the missile airframes.
GYROS. We have already explained how a gyroscope establishes a reference line in space. A gyro pickoff system can sense any change in missile attitude with respect to that reference.
PENDULUM. The mass of the earth has a strong gravitational attraction for objects near its surface. If a weight is hung on a string and suspended from a beam or other support, the string and weight form a pendulum. The weight may swing around when it is first suspended, but it will eventually come to rest. The string will be on a line between the point of support and the earth's center of gravity. The pendulum can therefore be used to establish a vertical reference line.
Some gyros are precessed to a vertical position by a pendulum device called a "pendulous pick-off and erection system." The complete gyro system is called a vertical gyro; it maybe used to measure the pitch and roll of a missile.
MAGNETIC DEVICES. Magnetic compasses have been used for centuries to navigate the seas. The compass enables a navigator to use the lines of flux of the earth's magnetic field as a reference. A similar device, known as a "flux valve" is used in some missile control systems. Its primary purpose is to keep a
83
directional gyro aligned with a given magnetic heading. The directional gyro can then be used to control the yaw of a missile.
MISSILE AIRFRAME. The airframe of the missile must be used for certain references. For example, the movement of flight control surfaces cannot be referenced to the vertical, or to a given heading, because such references change as the missile axes change. Therefore,
movement of flight surfaces are referenced to the missile airframe.
Synchro indicators can be used to indicate the angular position of control surface with respect to the missile airframe. A potentiometer can be used in the same way by mounting in on the missile airframe so that its shaft will be driven by the flight control surface movements.
D. Sensor Units
5D1. General
The sensor unit in a guided missile control system is a device used to detect deviation from the desired attitude. In this section, we will discuss the use of gyroscopes, altimeters, and transducers as sensing units. Gyroscopes are generally considered to be the basic sensor unit in any missile control system. Other types of sensors, such as altimeters and transducers, are classed as secondary units.
5D2. Gyros
A gyroscope contains an accurately balanced rotor that spins on a central axis. Figure 5D1 shows a FREE GYRO that is mounted so it can tilt, or turn, in any direction about its center of gravity.
GYROSCOPIC INERTIA. The characteristic of a gyroscope that resists any force which tends to displace the rotor from its plane of rotation is called "gyroscopic inertia." Three factors determine the amount of inertia. These are: the weight of the rotor, the distribution of this weight, and the speed at which the rotor spins.
A gyro with a heavy rotor has more rigidity than one with a light rotor, if the speed of rotation is the same for both. Distributing the weight of the gyro to the outer rim of the rotor will give increased rigidity even though there is no increase in the weight of the rotor. An increase in gyro rigidity can also be obtained by increasing the speed of rotation.
PRECESSION, REAL AND APPARENT. The characteristic of a gyro that causes the rotor to be displaced in a direction 90 degrees from that of the applied force is called precession. There are two types of gyro precession: REAL and APPARENT. Real
Figure 5D1.-Free gyroscope.
precession is sometimes called INDUCED PRECESSION.
The direction in which a gyro will precess, when an external force is applied, is shown in figure 5D2. A force applied to a gyro at its center of gravity does not tend to tilt the spin axis from its established position, and therefore does not cause precession. A spinning gyro can be moved in any direction without precession, if its axis can remain parallel to its original position in space. Therefore, the gyro can measure only those movements of the missile that tend to tilt or turn the gyro axis. Two gyros are needed for vertical and horizontal stabilization of missile flight. The spin axes of these gyros would be at right angles to each other.
APPARENT PRECESSION. The axis of a spinning gyro points in a fixed direction
84
Figure 5D2.-Gyro precession.
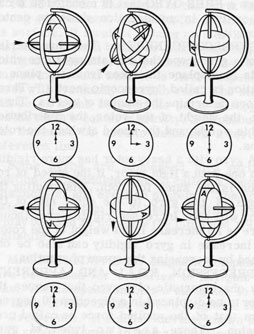
because inertia fixes it in space. Over a period of time a gyro axis will appear to tilt. This is called apparent precession, and is due to the rotation of the earth.
Figure 5D3 represents a gyro at the equator, with the spin axis horizontal and pointed east-west. The earth turns in the direction shown by the arrow. If you could observe the gyro spin axis from a point out in space, it would appear to always point east. To an observer standing on earth, the spin axis appears to gradually tilt or drift, so that after three hours, the spin axis has tilted 45
Figure 5D3.-Gyro position in space about the earth.
degrees. Notice the apparent precession shown in figure 5D4. After 12 hours the spin axis is again horizontal, but is pointing west instead of east. At the end of 24 hours, the spin axis is pointing east again.
This action gives the impression that the gyro has turned end for end, and that a complete revolution is made every 24 hours. But this is not true. Actually, the gyro axis has maintained its fixed direction in space; only the earth has moved.
The apparent precession of a gyro makes it unfit for use as a reference over an extended time unless some kind of compensation is used to keep the gyro in a fixed relation to the earth's surface.
GYRO DRIFT. Gyro error caused by random inaccuracies in the system is called drift. It has three principal causes-unbalance, bearing friction, and gimbal inertia.
Dynamic unbalance may occur because of operation at some speed or temperature other than for which the gyro was designed. Some unbalance exists in any gyro because of manufacturing tolerances.
An even amount of bearing friction all around a shaft does not cause drift. It will, however, cause the speed of rotation to change.
Figure 5D4.-Apparent precession.
85
Friction in the gimbal bearings causes a loss of energy and incorrect gimbal positions. Drift will be caused by friction in the spin axis bearings only if the friction is not symmetrical.
Energy is lost whenever a gimbal rotates, because of inertia. The larger the mass of the gimbal, the greater the drift from this source.
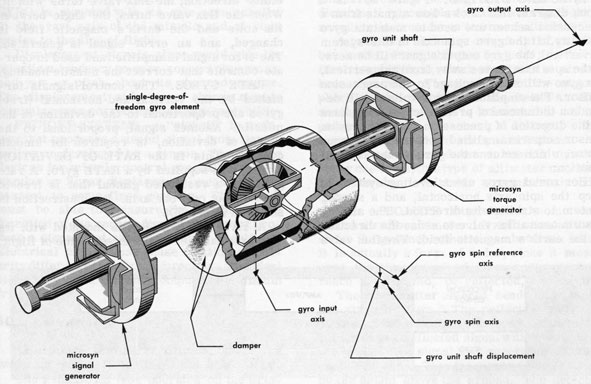
MOUNTING SYSTEMS. The main cause of random drift in gyros is friction in gimbal bearings. Figure 5D5 shows one type of mounting that has been developed to reduce this friction. It is called FLOATED GYRO UNIT.
The floated gyro unit is a viscous-damped, single-degree-of-freedom gyro with a microsyn torque generator and a microsyn signal generator mounted on its output shaft. The microsyn torque generator places a torque on the gyro gimbal.
The term "single-degree-of-freedom" means the gimbal is free to rotate with respect to the gyro case about a single axis. This axis is called the output axis; it is perpendicular to the gyro spin (reference) axis. If an angular velocity acts on the gyro case with a
component about the input axis, a precessional torque develops about the output axis.
In figure 5D5 the gyro wheel is contained within the damper housing. The microsyn signal generator units are mounted on the gyro shaft as shown in the drawing. The space between the damper housing and the gyro case is filled with a viscous damping fluid. Because of the high specific gravity of the fluid, it serves to float the gyro damper housing and gyro gimbal shaft, and thus reduces the gimbal bearing friction and drift. Thermostatically controlled heaters around the damping fluid space keep the fluid viscosity constant. If the gyro shown in figure 5D5 were mounted with its input axis parallel to the pitch of yaw axis of the missile, the torque applied to the output shaft would be proportional to the difference between the desired angular velocity of the missile and its angular velocity about the axis.
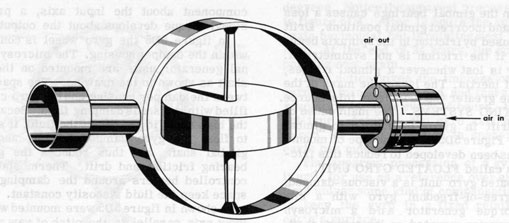
Another form of gyro support, shown in figure 5D6, is known as an air bearing. This type of support reduces friction to such a low value that for all practical purposes it can be
Figure 5D5.-Floated gyro unit.
86
Figure 5D6.-Air bearing gyro.
considered zero. Its operating principle may be explained by using a fairly common advertizing display for comparison. No doubt you have seen vacuum cleaner displays where the air stream from the cleaner was used to keep a number of ping pong balls or a large rubber ball virtually suspended in the air.
ERECTING SYSTEMS. Figure 5D7 is a block diagram that shows how signals from a precession sensor are used to maintain gyro stability. If the gyro spin axis in this system is vertical, the gyro output signal will be zero. If the spin axis moves away from the vertical, the gyro will send a voltage to the precession sensor. The amplitude of this voltage will depend on the amount of precession, and its phase of the direction of precession. The precession sensor output is amplified to operate the torque motor, which returns the gyro to the vertical position.
Horizontal gyros use a leveling system to keep the spin axis horizontal, and a slaving system to stabilize its direction. The slaving system uses a fluxvalve to sense the direction of the earth's magnetic field. The flux valve
unit is suspended on a universal joint enclosed in a bowl filled with fluid, to prevent excessive swinging in flight.
The gyro's spin axis, kept tangent to the earth's surface and slaved to the earth's magnetic field, provides a basic reference for missile heading. When the missile turns in either direction, the flux valve turns with it. When the flux valve turns, the angle between its coils and the earth's magnetic field is changed, and an error signal is generated. The error signal is amplified and used to operate controls that correct the missile heading.
RATE GYROS. The control signals furnished by the vertical and horizontal (free) gyros are proportional to the deviation of the missile. Another signal, proportional to the RATE of deviation, is required for smooth control. This is the RATE-OF-DEVIATION signal; it is supplied by a RATE gyro. A rate gyro has a restricted gimbal that is free to rotate about only one axis. Its construction is shown in figure 5D8.
A YAW RATE GYRO is mounted with its spin axis parallel to the missile line of flight.
Figure 5D7.-Vertical gyro erection system.
87
Figure 5D8.-Basic rate gyro.
A ROLL RATE GYRO is mounted so that its spin axis is parallel to the pitch axis, at right angles to the line of flight. A PITCH RATE GYRO is mounted with its spin axis parallel to the yaw axis of the missile and at right angles to the line of flight.
Displacement signals alone would give the missile a tendency to over-correct its errors, and yaw or pitch about its desired course. The displacement and rate of change signals minimize over-correction, and ensure stability.
PICKOFF SYSTEMS. A "pickoff" is a device that produces a useful signal from the intelligence developed by a sensor. The sensing devices for missile control generally indicate angular or linear displacement, measured with respect to some fixed quantity. The pickoff must be able to measure the amplitude and direction of the sensor displacement, and produce a signal that represents both quantities. Electrical pickoffs use phase relation or polarity difference to indicate direction. The ideal pickoff should have a linear output and minimum friction loss.
5D3. Altimeters
An altimeter measures altitude. There are two main types: PRESSURE and ABSOLUTE.
The PRESSURE type operates on the principle that air (atmospheric) pressure is
greatest at sea level and decreases steadily as the altitude increases. Since the atmospheric pressure at a given altitude is predictable, it is possible to calibrate a pressure-sensitive instrument in terms of altitude.
A pressure altimeter is a form of aneroid barometer. Its mechanism includes a bellow s-like chamber from which most of the air has been removed. The pressure of the atmosphere tends to collapse the bellows. The surface of the bellows is connected to a scale pointer through a mechanical linkage, which magnifies the bellows surface movement.
As the pressure does not remain constant at any one level, this type of altimeter may have an error due to variable atmospheric conditions.
The ABSOLUTE altimeter is sometimes called a radio altimeter. It indicates altitude above the ground, rather than above sea level. It is actually a form of radar, since it measures the time required for a radio pulse to reach the ground, be reflected, and return.
The transmitter antenna sends an FM signal straight down. The reflected energy is picked up by a separate antenna. A detector combines the reflected signal with a sample of the transmitted signal and generates a difference frequency. This frequency is determined by the height above the ground. The detector output is amplified and fed to an indicator such
88
as a cathode-ray tube, a meter, or a discriminator that operates a control circuit.
This system accurately indicates height above the ground, but it can not indicate height above sea level.
5D4. Air-speed transducers
A guided missile may use a transducer to measure ram air pressure, and provide an output voltage that indicates missile air speed.
One type of airspeed transducer uses bellows coupled to the shaft of a potentiometer. As the bellows is actuated by ram air pressure, it turns the potentiometer shaft and thus changes the circuit resistance.
Another type of airspeed transducer uses a synchro generator. The rotor of the synchro is so connected that expansion or contraction of the bellows causes the rotor to turn. This type of sensor will be described in the following section.
E. Pickoffs
5E1. Function
The pickoff device is important to the missile control system because it produces a signal from the intelligence developed by a sensor unit.
5E2. Requirements
The signal produced by the pickoff must be suitable for use in the control system it is serving. The pickoff must have an output sense. That is, it must be able to determine the direction of displacement and then produce a signal that indicates the direction. In electrical systems the indication may be a phase or polarity difference.
The ideal pickoff should have a considerable change in output for a small movement of the pickoff. It should also have minimum torque or friction loss since these losses would be reflected to the sensor element and affect its operation. Small physical dimensions and light weight are additional requirements for pickoffs used in missiles. The null point (no output) should be sharply defined.
5E3. Type
Electrical pickoffs in common use fall into four categories. Each has some characteristic that makes it suitable for certain applications.
SYNCHRO PICKOFFS. A synchro pickoff device is normally composed of a pair of synchro units wired as a generator and synchro motor. When an exciter voltage is connected to the pair, movement of the generator rotor will produce a corresponding movement of the synchro motor rotor. The generator rotor
shaft can be turned by a mechanical connection to the sensor unit, or by a motor. Regardless of the method used to turn the generator shaft, the synchro motor shaft will move the same amount. The synchro motor does not develop enough power to operate missile flight control surfaces. Therefore, it is used to operate other parts of the system which in turn operate the control surfaces.
To get better action as the null point is approached, a differential synchro system is sometimes used. In this system, two inputs-one electrical and the other mechanical-are fed to a synchro differential generator unit, which then furnishes a voltage equal to the sum or difference between the two inputs.
Synchro pickoffs are sometimes called selsyns, autosyns, or microsyns.
POTENTIOMETERS. A potentiometer is a variable resistance that is normally used as a voltage divider. The resistance element is formed into a circular shape and a moving arm makes contact with the element. By connecting leads to the ends of the strip from a voltage supply and then connecting a load to the moving arm and one end of the strip, the source voltage may be divided by varying the position of the arm on the strip.
The resistance used for many electronic applications is composed of a thin film of carbon deposited on an insulating material. This type of resistance element is not suitable for servo applications because the resistance changes with temperature, humidity and wear. These disadvantages are overcome by using a wire-wound resistance strip, as shown in figure 5E1.
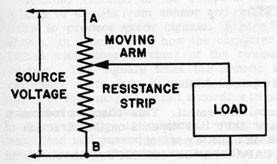
Figure 5E2 shows how a potentiometer divides voltage. The source voltage is applied
89
Figure 5E1.-Wire-wound potentiometer.
to points A and B. One side of the load is also connected to B. The section of the resistance strip between the moving arm and A acts as a resistance in series with the load, and there is less voltage at the load that is being furnished by the source. If the moving arm is all the way down to B, the load will get no voltage.
Thus, the position of the moving arm determines the amount of voltage. It is also possible to use the variation in resistance as a control medium. Since the resistance between A and the moving arm and between B and the moving arm vary as the arm is moved, a null can be indicated when the two resistances are equal.
If the shaft of the potentiometer is mechanically coupled to the sensor, the output voltage will vary according to the moving arm displacement. However, the voltage does not change smoothly with this type construction. The jumpy output is due to the voltage
Figure 5E2.-How a potentiometer divides voltage.
difference between adjacent turns of wire. In order to remove this objection, the resistance element is sometimes wound in the form of a helix. Units using this construction are usually identified by the name HELIPOT instead of potentiometer.
Potentiometers are often used in bridge circuits. The potentiometer forms two arms of the bridge, and fixed resistors form the other two. It is also possible to use two potentiometers to comprise all four arms of the bridge.
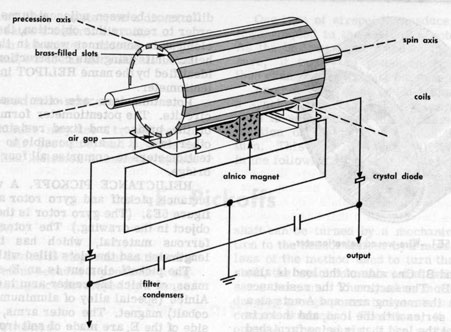
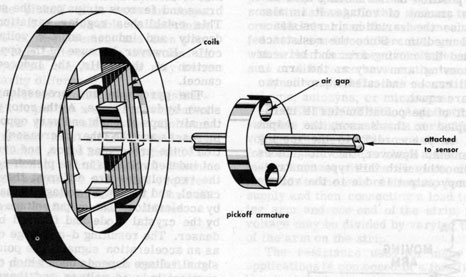
RELUCTANCE PICKOFF. A variable reluctance pickoff and gyro rotor are shown in figure 5E3. (The gyro rotor is the cylindrical object in the drawing.) The rotor is made of ferrous material, which has been slotted lengthwise and the slots filled with brass.
The pickoff element is an E-shaped metal mass, of which the center arm is a permanent Alnico (special alloy of aluminum, nickle, and cobalt) magnet. The outer arms, and the long side of the E, are made of soft iron. Coils are wound on each leg and connected in series opposition. As the gyro rotates, it causes regular variations in the magnetic flux paths as the brass and ferrous strips pass the end pieces. This establishes regular variations in flux density and induces an a-c voltage in the coils. However, because of the opposing connection of the coils, the induced voltages cancel.
The gyro spin and precession axes are shown by dashed lines. As the rotor precesses, the air gaps at each end vary oppositely (one increases and the other decreases) in proportion to the precessing force, and cause different induced voltages in the pickoff coils. Since the two voltages are different they no longer cancel, and the output voltage is that produced by acceleration. The output voltage is rectified by the crystal diode and filtered by the condenser. The resulting d-c voltage can be used as an acceleration signal. The polarity of the signal voltage depends upon which coil has the greatest induced voltage, and therefore indicates the direction of the acceleration.
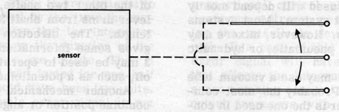
Figure 5E4 shows another type of reluctance pickoff. The stator has four coils divided into two pairs. One pair is supplied with a constant-amplitude a-c voltage from a reference oscillator.
Voltage from one pair of coils is induced in the second pair through an armature. The
armature is fastened to a shaft that is mechanically coupled to the gyroscope gimbal. As the gimbal moves, it causes the armature position to change, and alters the coupling between the two sets of coils. The amplitude of the induced voltage changes in proportion to the
gimbal movement. This change produces a phase shift that depends on the direction of shift in missile position.
CAPACITANCE PICKOFF. As shown in figure 5E5, a capacitance pickoff is composed of two outer plates that are fixed in position.
91
Figure 5E5.-Capacitance pickoff.
A movable plate is centered between the two fixed plates and connected to the sensor. The capacity between the center plate and the two outside plates is equal when there is no output from the sensor. If, however, a signal from the sensor causes the center plate to move toward the bottom plate, the capacity between these two plates will increase and the capacity
between the top plate and the center plate will decrease.
This change in capacity can be used to vary the tuning of an oscillator. The change in oscillator frequency is then used for sense control. This type of pickoff is the most sensitive of all, since a very slight change in plate spacing will cause a large change in frequency.
F. Computing Devices
5F1. General
Computers appear in missile systems in a variety of forms. The computer maybe a simple mixing circuit in a missile, or it may be a large console type unit suitable for use at ground installations only.
5F2. Function and requirements
One important function of a computer is the coding and decoding of information relating to the missile trajectory. It is necessary to code and decode control information in order to offset enemy countermeasures and to permit control of more than one missile at the same time.
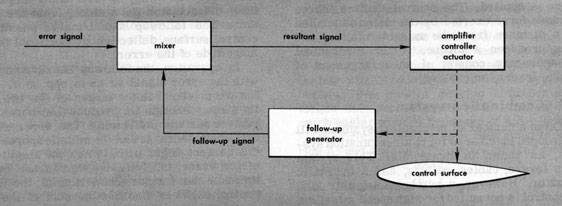
Another function of the computer is the mixing of signals from sensor and reference units to produce error signals. Figure 5C1 shows, in block form, how the computer is linked with other sections of the complete system. The signals from the sensor and reference units may be mixed in a preset ratio, or they may be mixed according to programmed instructions.
The error signals produced by mixing are amplified and passed to the control actuating system and the followup section. The output of the followup section is then fed back to the computer for reprocessing. The purpose of
feedback is to reduce over control that would cause the missile to oscillate about the desired attitude.
The computer section may also compare two or more voltages to produce error signals. For this purpose, voltage or phase comparator circuits are added. The synchro units discussed in the previous section are used in computers to convert signal voltages into forms that are better suited for processing.
Airborne computers are generally classified according to the phase of missile flight in which they are used. The computers may be separate units or they may be combinations of prelaunch computer, launch computer, azimuth computer, elevation computer, program computer, and dive-angle computer.
5F3. Types of computers
In a missile control system, computer elements are of general types-mixers, integrators, and rate components.
MIXERS. As you will recall from the first part of this chapter, a mixer is basically a circuit or device that combines information from two or more sources. In order to function correctly, the mixer must combine the signals that are fed to it in the proper PROPORTION, SENSE, and AMPLITUDE.
92
The type of mixer used will depend mostly on the type of control system. Most systems use electronic mixers. However, mixers may also use mechanical, pneumatic, or hydraulic principles.
Electronic mixers may use a vacuum tube as a mixing device. Probably the most common type of tube mixer is the one used in conventional superheterodyne radio sets. Here a tube mixes an incoming RF signal with the signal of a local oscillator to produce a difference frequency. It is also possible to use a network composed of inductors, capacitors, and resistors for mixing. Regardless of the type of mixer, the signals to be combined are represented by the amplitude and phase of the input voltages. Voltages from such sources as pickoffs, rate components, integrators, followup generators, and guidance sources may be combined by the mixer section to form control signals.
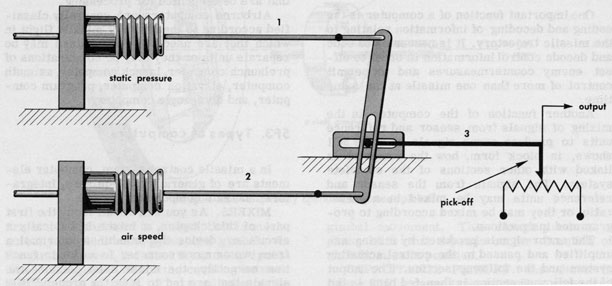
Mechanical mixers consisting of shafts, levers, and gears can also be used to combine information. Figure 5F1 shows how lateral signals from two sources can be combined by using plain levers. To see how this works, assume that shafts 1 and 2 operate independently, and that their positions represent information that must be combined. The three connections pivot freely. The position of shaft 3 represents a weighted average
of the other two shafts, because the vertical lever arms from shaft 3 are not of the same length. The direction of shaft movement gives sense information. The output of shaft 3 may be used to operate an electrical pick-off, such as a potentiometer.
Another mechanical mixer uses gears to combine position or angular velocity information. The gear arrangement is similar to that of an automobile rear axle differential. If the input shafts contain position information, they will move slowly and maintain approximately the same average position. The position of the output shaft constantly indicates the difference between the two shaft positions. If the information is represented by the speed of the shaft rotation, the angular velocity of the output shaft represents the difference between the two input shaft speeds.
It is possible to arrange the input shafts so that the output represents the sum of the inputs rather than the difference. Weighting factors can be controlled by changing the gear ratios in the differential.
Sometimes information is transferred through air or hydraulic tubes. The signals are created by varying the pressure inside the tube. Two signals can be combined by joining two tubes into one.
INTEGRATORS. An integrator performs a mathematical operation on an input signal. The
Figure 5F1.-Mechanical mixer.
93
integral of a constant signal is proportional to the amplitude multiplied by the time the signal is present. Assume that the integrator output is four volts when the duration of the constant input signal is one minute. Then if the same input signal had lasted for one-half minute, the output would have been two volts.
But, an actual missile error signal is not constant, as we assumed in the above example. The amplitude and sense of the error change continuously. Even so, the integrator output is proportional to the product of the operating time and the average error during that time. Should the sense of the error change during the integration period, a signal of opposite sense would cause the final output of the integrator to decrease. The integrator can be considered as a continuous computer, since it is always producing a voltage that is proportional to the product of the average input voltage and time. Therefore, the integration of an error with respect to time represents an accumulation of intervals of time and errors over a specified period.
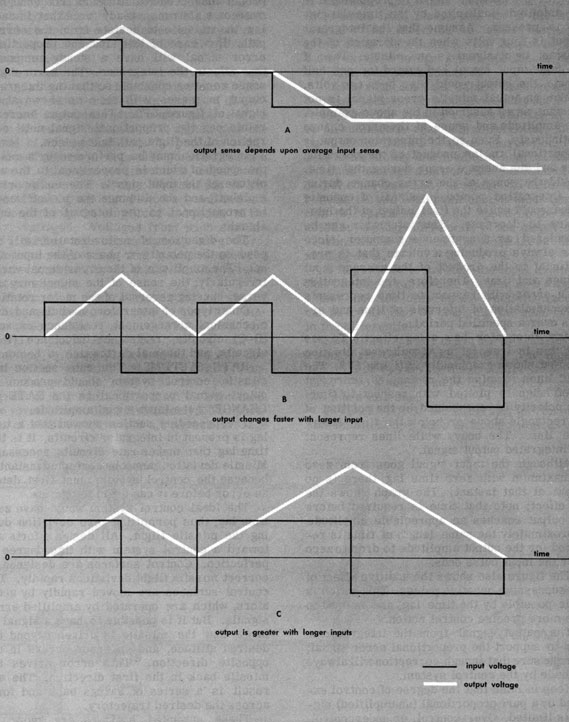
Any integrator has a lag effect. To see why this is true, let us visualize a situation like that shown graphically in figure 5F2. The solid lines forming the rectangles represent on-off signals plotted with respect to time. The polarity is represented by the position of the rectangle above or below the time reference line. The heavy white lines represent the integrated output signal.
Although the input signal goes from zero to maximum with zero time lag, there is no output at that instant. The graph shows the lag effect; note that time is required before the output reaches an appreciable amplitude. Approximately the same length of time is required for the output amplitude to drop to zero after the input pulse ends.
The figure also shows the additive effect of two successive negative pulses. This action is made possible by the time lag, and is used to give more precise control action.
The output signal from the integrator is used to support the proportional error signal, to make sure that enough correction will always be made by the control system.
Keep in mind that the degree of control exerted by a pure proportional (unamplified) signal is limited. Over-control, or undercontrol, cause excessive movement of the missile about the desired trajectory. There are times when
proportional control alone is not enough to overcome a strong, steady force that is causing the missile to deviate from the correct path. In a case of this kind, the proportional error signal will have a steady component that affects the integrator. The error signal sense remains constant, so that the integrator output increases with time as shown at the right of figure 5F2. This output increase reinforces the proportional signal until correction of the flight path takes place.
Integration may be performed by a motor, the speed of which is proportional to the amplitude of the input signal. The motor drives a pickoff, and the distance the pickoff moves is proportional to the integral of the input signal.
The direction of motor rotation will depend on the polarity or phase of the input signal. The amplitude of the error signal varies irregularly; the sense of the signal may reverse, causing reversal of the motor rotation.
Other types of integrators use ball-and-disk mechanical arrangement, resistance-capacity (R-C) circuits, resistance-inductance (R-L) circuits, and thermal devices.
RATE SYSTEMS. The rate section in a missile control system should produce an output signal proportional to the RATE OF CHANGE of the input signal amplitude.
The preceding section showed that a time lag is present in integrator circuits. It is this time lag that makes rate circuits necessary. Missile deviation cannot be corrected instantly, because the control system must first detect an error before it can begin to operate.
The ideal control system would have zero time lag, thus permitting zero deviation during the missile flight. All design efforts are toward a control system with this degree of perfection. Control surfaces are designed to correct missile flight deviations rapidly. The control surfaces are moved rapidly by actuators, which are operated by amplified error signals. But it is possible to have a signal so large that the missile is driven beyond the desired attitude, and an error occurs in the opposite direction. This error drives the missile back in the first direction. The end result is a series of swings back and forth across the desired trajectory.
These unwanted swings are known as oscillation (or hunting) and the addition of a rate signal has the effect of damping (retarding)
94
Figure 5F2.-Integrator time lag and sense.
95
the oscillation. The amount of damping may be classed as CRITICAL, UNDERDAMPING, or OVERDAMPING.
The end effect of a rate signal is a reduction in the time between the initial control pulse and the output action. To reduce this time, the rate signal is combined with the proportional signal to produce a resultant signal that leads the original proportional signal.
However, there is output from the rate device only when the missile deviation is changing. The amount of output is dependent on the rate of change. By combining the rate signal and the error signal, the system can be made to respond to a constant error. It is also
possible to combine an attitude rate signal with a guidance signal.
Perhaps the most common method of producing a rate signal is by using a separate sensor unit, such as a rate gyro. As explained previously, the rate gyro construction is such that it can precess only a few degrees and in only one plane. Precession is restrained by a spring that tends to return the gyro to the midpoint. Any precession in this plane is caused by a force acting on the gyro gimbals. Such a force would be developed by any angular movement of the missileframe. The magnitude of the force would be proportional to the rate of movement. The gyro displacement is detected by a pickoff, and the output of the pickoff is the rate signal.
G. Amplifiers
5G1. Purpose
Amplifiers are divided into two groups-POWER and VOLTAGE. Both are used in missile control systems to build up a weak signal from a sensor so that it can be used to operate other sections of the control system. These sections normally require considerably more power or voltage than is available from the sensor. Most amplifiers use electronic tubes, but in this section we will discuss some of the less conventional amplifiers.
5G2. Operating principles
Some functions in missile control systems require a series of flat-topped pulses, called square waves, at a definite frequency. It is possible to convert other wave shapes to square waves with vacuum tube amplifiers and clippers. It is also possible to accomplish the same result with a mechanical device known as a chopper.
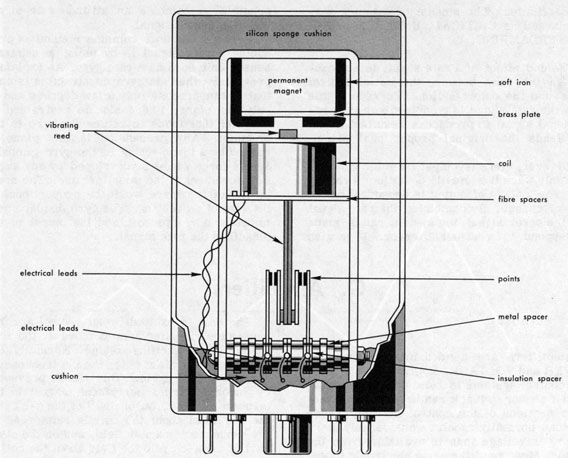
The chopper is a mechanical switch designed to operate a fixed number of times per second. A cutaway view of a mechanical chopper is shown in figure 5G1. This unit has the contacts arranged for single-pole double-throw switching, center OFF position.
The coil is excited by an a-c voltage that causes the vibrating arm to move at the frequency of the exciting voltage. Normally, the reed would vibrate at twice the a-c frequency-once each half-cycle. This can be prevented by incorporating a permanent magnet in the structure. Then, on one half of the a-c cycle the a-c field about the coil is reinforced by the permanent magnet field, and on the other part of the a-c cycle the field about the coil is opposed by the permanent magnet field. As a further aid to operation on the desired frequency, the vibrating reed is tuned for that frequency by weighting.
The contact arrangement is shown near the bottom of the drawing. Leads are brought out separately from each of the two fixed contacts and the vibrating reed to pins on the base. These pins are arranged so that the chopper can be plugged into a conventional radio tube socket. In order to reduce operating noise, the entire mechanism is enclosed in a sponge rubber cushion before it is placed in the metal can. By using the chopper in connection with a conventional transformer, amplification can be obtained at the pulse frequency.
Vacuum tubes can be used as electronic choppers. Other amplifiers, known as saturable reactors, are used for a-c motor control. This type of amplifier may sometimes be used in combination with vacuum tubes.
96
Figure 5G1.-Cutaway view of mechanical chopper.
H. Controller Units
5H1. Function
A controller unit in a missile control system responds to an error signal from a sensor. In certain systems an amplifier which is furnishing power to a motor serves as a controller. In this section we will discuss controller units other than amplifiers.
5H2. Types
There are several types of controllers and each type has some feature that makes it better suited for use in a particular missile system than other types.
SOLENOIDS. A solenoid consists of a coil of wire wound around a nonmagnetic hollow tube; a movable soft-iron core is placed in the tube. When a magnetic field is created around the coil by current flow through the winding, the core will center itself in the coil. This makes the solenoid useful in remote control applications, since the core can be mechanically connected to valve mechanisms, switch arms, and other regulating devices. Two solenoids can be arranged to give double action in certain applications.
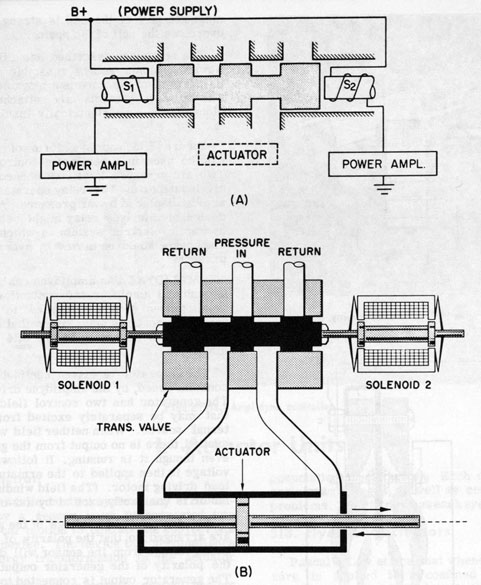
TRANSFER VALVES. Figure 5H1 shows an application in which two solenoids are used to operate a hydraulic transfer valve. When
97
Figure 5H1.-a. Transfer valve (closed). b. Hydraulic transfer valve and actuator.
neither coil is energized, the valve is closed (fig. 5H1a). If S2 receives more energy, the center part of the valve section is pulled to the right, and the actuator is caused to move. The converse is true if more current flows thru S1. The actuator can be used to physically position a control surface.
RELAYS. Relays are used for remote control of heavy-current circuits. The relay coil may be designed to operate on very small
signal values, such as the output of a sensor. The relay contacts can be designed to carry heavy currents.
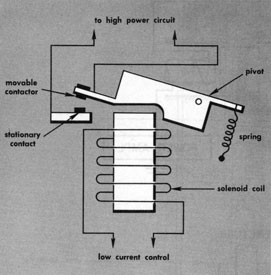
Figure 5H2 shows a relay designed for controlling heavy load currents. When the coil is energized, the armature is pulled down against the core. This action pulls the moving contact against the stationary contact, and closes the high current circuit. The relay contacts will stay closed as long as the
98
Figure 5H2.-Low current relay.
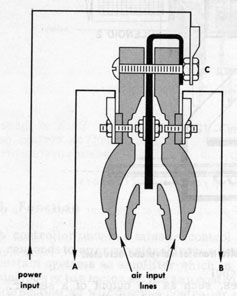
Figure 5H3.-Air-actuated relay.
magnetic pull of the coil is strong enough to overcome the pull of the spring.
The relay just described has a fixed core. However, some relays resemble a solenoid in that part of the core is a movable plunger. The moving contacts are attached to the plunger, but are electrically insulated from it.
Figure 5H3 shows a form of relay that can be used in a penumatic control system. Two air pressure lines are connected to the air input ports. The relay operates when its arm is displaced by air pressure. A modified design of this type relay might be used in a hydraulic-electric system in which case the diaphragm would be moved by hydraulic fluid pressure.
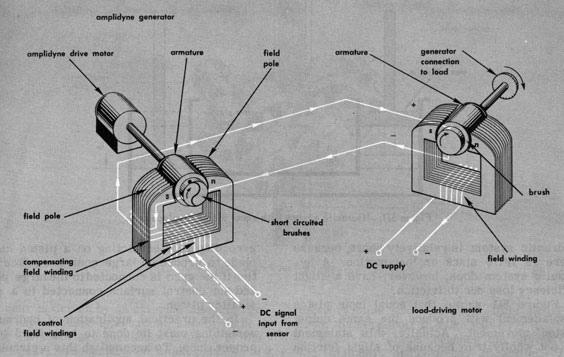
AMPLIDYNE. An amplidyne can be used as a combined amplifier and controller, since a small amount of power applied to its input terminals controls many times that amount of power at the output. Figure 5H4 shows an amplidyne.
The generator is driven continuously, at a constant speed, by the amplidyne drive motor. The generator has two control field windings that may be separately excited from an external source. When neither field winding is excited, there is no output from the generator, even though it is running. It follows that no voltage is then applied to the armature of the load driving motor. (The field winding of the motor is constantly excited by a d-c voltage.)
The control field windings of the generator are arranged so that the polarity of the excitation voltage from the sensor will determine the polarity of the generator output voltage. The generator output is connected to the load driving motor armature through the latter's commutator. Since the field of the motor is constantly excited by a fixed polarity, the polarity of the voltage applied to the armature will determine the direction of armature rotation.
99
Figure 5H4.-Amplidyne controller.
I. Actuator Units
5I1. Function
In a missile control system, any error detected by a sensor must be converted into mechanical motion to operate the appropriate control device. The device that accomplishes this energy transformation is the actuator unit.
The actuator for a specific control system must be selected according to the characteristics of the system. The actuator must have a rapid response characteristic, with a minimum time lag between detection of the error and movement of the flight control surfaces. At the same time, the actuator must produce an output proportional to the error signal, and powerful enough to handle the load.
5I2. Principal types
Actuating units use one or more of three energy transfer methods: hydraulic,
pneumatic, or electrical. Each of these has certain advantages, as well as certain design problems. We will discuss each system briefly.
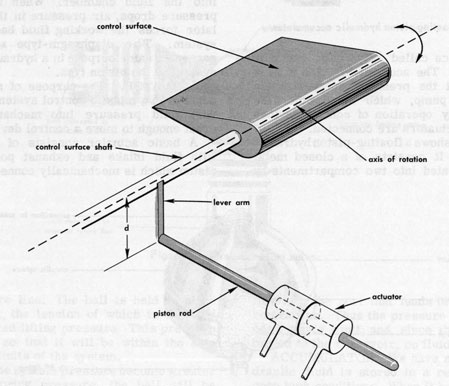
5I3. Hydraulic actuators
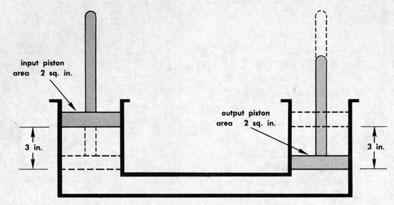
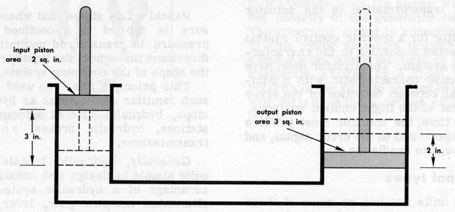
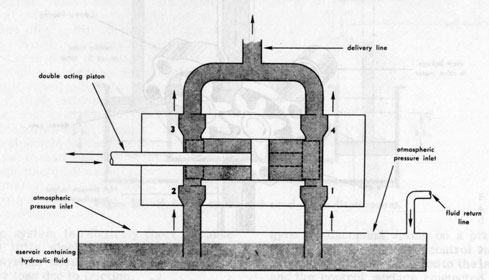
Pascal's Law states that whenever a pressure is applied to a confined liquid, that pressure is transferred undiminished in all directions throughout the liquid, regardless of the shape of the confining system.
This principle has been used for years in such familiar applications as hydraulic door stops, hydraulic lifts at automobile service stations, hydraulic brakes, and automatic transmissions.
Generally, hydraulic transfer units are quite simple in design and construction. One advantage of a hydraulic system is that it eliminates complex gear, lever, and pulley arrangements. Also, the reaction time of a
100
Figure 5I1.-Hydraulic system with equal piston displacement.
hydraulic system is relatively short, because there is little slack or lost motion. A hydraulic system does, however, have a slight efficiency loss due to friction.
Figure 511 shows that equal input piston displacement will produce the same output piston movement. Actually, this statement is not wholly true because of slight friction and compressibility losses. But for all practical purposes, the motion can be considered to be the same for equal piston displacements.
A different condition is shown in figure 512, where the output piston force has been increased. Because we can't get something for nothing, increased force results in a decrease in piston travel. Keep in mind also, that the output piston could be used as the input piston, and vice versa. Hypothetically then, a small
gyro displacement acting on a piston can be made to produce a large control surface motion if the gyro is connected to the large piston and the control surface connected to a much smaller piston.
In the practical application of hydraulics, something must be done to keep fluid in the proper lines. To accomplish this a circulating system is used. This requires pressure, which is furnished by a pump.
PUMPS. The pump used in a hydraulic system must be driven by some power source, usually an electric motor, within the missile. Pumps used in missile systems generally fall into two categories-gear and piston.
A gear type pump is shown in figure 513. It consists of two tightly meshed gears enclosed in a housing. The clearance between the gear teeth and the housing is very small.
One gear is driven by an external motor. The other has an idler-type mount, and turns because its teeth are meshed with those of the driven gear. In operation, the intake port (top of figure) is connected to a hydraulic fluid reservoir, and the output port is connected to the high-pressure delivery line.
As the gears turn past the intake port, fluid is trapped between the gear teeth and the housing. This trapped fluid is carried around the housing to the output port. Because the fluid then has no place else to go, it is forced into the high-pressure delivery line.
A double-action piston pump is shown in figure 514. This arrangement is called double action because fluid is pumped from the reservoir as the piston moves in either direction. To see how this happens, assume that the piston is at the extreme right of the cylinder, and that it has started to move to the left. A slight vacuum will be created as the piston moves, and this will reduce the pressure on valve No. 1. At the same time, system pressure will force valve No.4 shut. Atmospheric pressure, which is admitted to the reservoir through regular inlets, will then act on the fluid which opens valve No. 1. At the same time, fluid to the left of the piston is being compressed. This forces valve No. 2 to close and block the path to the reservoir. The pump pressure forces valve No. 3 to open and, as a result, the fluid on the left side of the piston is forced into the
delivery tube and additional fluid is pulled from the reservoir through valve No. 1.
When the piston reaches the left side of the cylinder, it reverses direction. This creates pressure against valves Nos. 1 and 4 so that valve 1 closes and valve 4 opens. At the same time, valve 3 closes and valve 2 opens.
RESERVOIR. The reservoir shown in figure 514 is a storage compartment for hydraulic fluid. Fluid is removed from the reservoir by the pump, and forced through the hydraulic system under pump pressure. After the fluid has done its work, it is returned to the reservoir to be used again. The reservoir is actually an open tank because of the atmospheric pressure inlets.
VALVES. The valves in the illustrated piston pump are of the flap type, which operate with very small changes in pressure. Another type of valve used in hydraulic systems is the pressure relief valve. As its name implies, it is used to prevent damage to the system by high pressures. Some combination systems use hydraulic pressure regulating switches instead of pressure relief valves.
A typical hydraulic relief valve is shown in figure 515. It consists of a metal housing with two ports. One port is connected to the hydraulic pressure line and the other to the reservoir return line. The valve consists of a metal ball seated in a restricted section of
102
Figure 5I4.-Double-action piston pump.
Figure 5I5.-Pressure relief valve.
the pressure line. The ball is held in place by a spring, the tension of which is adjusted to the desired lifting pressure. This pressure is chosen so that it will be within the safe operating limits of the system.
Should the system pressure become greater than the spring pressure, the ball will be forced away from the opening, and fluid will
flow into the port that leads to the reservoir return line. Thus the pressure can never exceed a safe limit; and, since the fluid is returned to the reservoir, no fluid is lost.
ACCUMULATOR. We have shown that hydraulic fluid is stored in a reservoir under open tank conditions. When it becomes necessary to store hydraulic fluid under pressure,
a storage space called a hydraulic accumulator is used. The accumulator also serves to smooth out the pressure surges from a double-action pump, which would otherwise cause unsteady operation of control devices to which the actuators are connected.
Figure 5I6 shows a floating-piston hydraulic accumulator. It consists of a closed metal cylinder separated into two compartments by
a floating piston. One compartment is an air chamber and the other a fluid chamber.
In operation, the air chamber is charged, through the bottom fitting, with compressed air until the chamber pressure equals the line pressure desired in the hydraulic system. This pressure forces the piston up toward the top of the cylinder. The cylinder is connected to the hydraulic pressure line through the fitting at the top. If the line pressure becomes greater than the air pressure, fluid is forced into the accumulator, and forces the piston down against the air pressure. Should line pressure drop, the air pressure forces the piston up and puts fluid back in the line. This action smooths out variations in pressure during periods of heavy loading, or when the pressure pump lags.
Another type of hydraulic accumulator, the diaphragm type, is shown in figure 5I7. It is built in the form of two hemispherical chambers, which are separated by a flexible diaphragm. Air pressure forces the diaphragm upward. If the system pressure becomes greater than the air pressure, fluid is forced into the fluid chamber. When the system pressure drops, air pressure in the accumulator forces the working fluid back into the system. The diaphragm-type accumulator serves the same purpose in a hydraulic control system as the piston type.
ACTUATOR. The purpose of a hydraulic actuator in a missile control system is to convert fluid pressure into mechanical force great enough to move a control device.
A basic actuator consists of a cylinder with fluid intake and exhaust ports, and a piston which is mechanically connected to the
Figure 5I7.-Diaphragm-type accumulator.
104
load. It is possible to have a double-acting piston-type actuator in which hydraulic fluid under pressure can be applied to either side of the piston. A double-action actuator is shown in figure 5H1b.
5I4. Pneumatic
The principal difference between a hydraulic system and a pneumatic system is the use of air rather than hydraulic fluid, as the working medium.
In a pneumatic system, air from a pressure tank passes through delivery tubes, valves, and pressure regulators to operate mechanical units. After the air has done its work, it is exhausted to the atmosphere. It cannot be returned to the tank for reuse. Consequently, air must be stored at a much higher pressure than is necessary for operating the loads in order to have enough pressure to operate the controls as the air supply in the tank diminishes.
A pneumatic control system is shown in figure 5A8, and a brief explanation of the operating sequence is given in the accompanying text.
5I5. Electrical
Generally, motors are used as actuators in electrical control system. The size of the load, and the speed with which it must be moved, determine the type of motor to be used. D-c motors are most often used for driving the heavy loads encountered in missile systems, because d-c motors develop a higher stall torque than do a-c motors. In addition, it is much easier to vary the speed of a d-c motor.
Electrical systems were described in section A, and an electrical pitch control system is shown in figure 5A12.
5I6. Mechanical linkage
We have discussed the various control systems, but have not discussed in detail the mechanical means of linking the flight control surfaces to the actuator. In addition to providing a coupling means, the linkage may also be used to amplify either the force applied or the speed of movement.
A mechanical linkage between an actuator and a load is shown in figure 5I8. The distance,
Figure 5I8.-Actuator and load linked by lever arm.
105
d, on the drawing represents the distance from the control surface shaft to the point where the force is applied. The control surface moves because force exerted by the piston is applied at a distance from the axis of rotation, and thus produces a torque. Other mechanical linkages may consist of an arrangement of gears, levers, or cables.
5I7. Combination systems
Often a number of mechanical systems will be grouped together to form a combination system, as shown in figure 519. This system uses levers, cables, pulleys, and a hydraulic actuator. However, a system using this kind of control is not suited for high speed missiles.
5I8. Followup units
The followup unit in a missile control system plays an important part in obtaining a smooth trajectory with minimum oscillation. It does this by providing continuous information on flight control surface position in relation to the missile axes. The followup signal indicates how the output section of the control system is following the correction data initiated by the sensor unit.
Without a signal of this type, the control surface would swing to their limit stops any time the actuator got a signal from the sensor. The followup signal makes possible a control surface deflection proportional to the magnitude of the error.
In operation, the followup signal combines with the error signal so as to oppose it. But, the error signal is the larger of the two, and is strong enough to produce the necessary control surface deflection. The error signal amplitude decreases as the missile approaches the correct flight path. When the amplitudes of the error and followup signals are equal, there is no further deflection of the flight control surfaces, because the sum of the two signals is zero.
An electrical followup system is shown in figure 5110. In this system, the error signal is supplied to an electronic mixer where it is combined with the smaller signal from the followup generator. The difference, or resultant, of these signals is fed through an amplifier and controller to the actuator section that operates the control surface. A portion of this signal is also fed to the followup generator, so that the followup signal is proportional to the flight surface deviation from the axis line.
Figure 5I9.-Combination mechanical linkage.
515354 O-59-8
106
Figure 5I10.-Followup loop of missile control system.
Figure 5I11.-Air relay with mechanical followup.
107
It is also possible to use a mechanical followup. When this method is used, the follow-up mechanism maybe a part of an air relay as shown in figure 5I11. The control surface position in relation to the missile axis is indicated by a force which is reflected to the controller by a spring.
To see how this system operates, assume that the signal from a pneumatic pickoff moves the air relay diaphragm up. The follow-up arm will then move clockwise. This movement causes the valve spool of the air valve to move upward. The valve action admits high-pressure air to the relay, and the pressure forces the piston of the pneumatic actuator to the left. When this happens, the followup
spring is compressed and tends to turn the followup arm in a counter-clockwise direction. Since the followup force is in opposition to the original motion of the followup arm, we have the desired inverse feedback.
A large signal will create a larger flight control surface deflection before the feedback force becomes great enough to return the followup arm to zero. The spring will then push the followup arm and the air valve in the opposite direction, to move the flight control surface back. Therefore, the spring acts to limit flight surface deflection to a value determined by the error signal, and to return the flight control surface to a position parallel with the missile axis.
108
CHAPTER 6 PRINCIPLES OF MISSILE GUIDANCE
A. Introduction
6A1. General
From an offensive viewpoint, a missile can be considered as a long-range artillery projectile. In its basic form, a missile is a self-propelled, high-explosive weapon. Like a projectile, it must be carefully aimed in order to follow a trajectory that will take it to the target.
Missiles like projectiles, are influenced by natural forces such as cross winds. But, because a missile usually makes a much longer flight than a projectile, it is subjected to these natural influences for a longer time.
A missile is a very expensive piece of ordnance. If the conventional artillery practice of firing several ranging shots were followed, the cost would be prohibitive. And unguided missiles would be of little value against moving targets, which can take evasive action.
All of these factors add up to this: an accurate means of guiding a missile to its target is an absolute necessity.
Modern guidance systems are far advanced. But progress in electronic and allied equipments is rapid, and our present guidance systems may be out of date within a few years. The ultimate system may be a composite formed from the systems you will read about in this and the following chapters, or it may be entirely different from any of them.
6A2. Definitions
A GUIDED MISSILE may be defined as an unmanned projectile that carries its own flight control equipment. In addition, the missile carries a payload-either of explosives or of scientific equipment. High-altitude missiles are used to obtain data on conditions existing far above the earth. Missiles equipped with guidance control and scientific instruments have been shot into the "mushroom cloud" that forms after an atomic blast, to obtain data on radioactivity, temperatures, and other effects. Since missiles have a number of peacetime applications, they should not be considered exclusively as weapons.
The word GUIDED means that the missile flight surfaces are operated by a control system within the missile, in much the same way as if a human pilot were aboard the missile guiding it to the desired target.
6A3. Purpose and function
The purpose of a guidance system is to control the path of the missile while it is in flight. This makes it possible for personnel at ground or mobile launching sites to hit a desired target, regardless of whether that target is fixed or moving, and regardless of whether or not it takes deliberate evasive action. The guidance function may be based on information provided by sources inside the missile, or on information sent from fixed or mobile control points, or both.
6A4. Basic principles
The guidance system in a missile can be compared to the human pilot of an airplane. One guidance system uses an optical device that guides the missile to the target in much the same way as a pilot, using landmarks for bearings, guides a plane to a landing field.
If landmarks are obscured, the pilot must use another system of guidance. He could, for example, use radio beams. One missile guidance system uses radio or radar beams for guidance; another uses radio to send information to the missile, just as a ground control station might send instructions to a pilot.
We have mentioned radio and radar as primary guidance controls, but these are not the only methods by which a missile trajectory can be controlled. Heat, light, television, the earth's magnetic field, and loran have all been found suitable for specific guidance purposes. Information on all these systems will be given in later chapters.
When an electromagnetic source, such as radio or radar, is used to guide the missile, an antenna and receiver are installed in the missile to form what is known as a SENSOR. The sensor section picks up, or senses, the guidance instructions. Missiles that are guided
109
by other means use different sensor elements. But the missile control sections, which follow
the sensor section, are basically similar for all types of guidance.
B. Phases of Guidance
6B1. General
For purposes of explanation, missile guidance may be divided into three separate phases. The first is known as the LAUNCHING, or INITIAL phase. The second is called the MIDCOURSE phase, and the last is called the TERMINAL phase. These names refer to different parts of the missile flight path.
6B2. Initial phase
Missiles may be launched from a point at some distance from the guidance equipment. Because the missile does not have aerodynamic stability when it is first launched, the flight controls are locked in the neutral position, and remain locked for a short time after launching. As soon as the controls are unlocked, and the guidance system assumes control, the initial phase of guidance is completed.
6B3. Midcourse phase
The second, or midcourse phase of guidance is often the longest in both distance and
time. During this part of the flight, changes may be required to bring the missile onto the desired course, and to make certain that it stays on that course. During this guidance phase, information can be supplied to the missile by any of several means. In most cases, the midcourse guidance system is used to place the missile near the target, where the system to be used in the final phase of guidance can take over. But, in some cases, the midcourse guidance system is used for both the second and third guidance phases.
6B4. Terminal phase
The terminal phase is of great importance because it can mean a hit or a miss. The last phase of surface-to-air missile guidance must have high accuracy as well as fast response to guidance signals.
Near the end of the flight, the missile may lack the power necessary to make the sharp turns that are required to overtake and score a hit on a fast-moving target. In order to decrease the possibility of misses, special systems are used. These systems will be described in the following chapters.
C. Components of Guidance Systems
6C1. General requirements
A missile guidance system involves a means of determining the position of the missile in relation to known points. The system may obtain the required information from the missile itself; it may use information transmitted from the launching station or other control point; or it may obtain information from the target itself. The guidance system must be stable, accurate, and reliable.
In order to achieve these basic requirements, the guidance system must contain components that will pick up guidance information from some source, convert the information into usable form, and activate a control sequence that will move the flight control surfaces on the missile.
Because it is difficult to separate the control and guidance operations, we will go through the entire guidance system. However, the flight control section is concerned with flight stability. Missile accuracy is primarily a function of the guidance section. Missile reliability depends on both sections. We will list the components and briefly describe the basic function of each before going into the individual types of guidance systems.
6C2. Sensor
In some respects, the sensor unit is the most important section of the guidance system because it detects the form of energy being used to guide the missile. If the sensor unit fails, there can be no guidance.
110
The kind of sensor that is used will be determined by such factors as maximum operating range, operating conditions, the kind of information needed, the accuracy required, viewing angle and weight and size of the sensor, and the type of target and its speed.
Acoustic sensors called hydrophones are often used in torpedo guidance systems. Essentially, a hydrophone is a microphone that works underwater. It picks up the vibrations of ships' propellers, and the torpedo can "home" on this noise. Acoustic sensors are not well suited for airborne missiles.
Heat, or infrared sensors use an active element called a THERMOCOUPLE, or an element known as a BOLOMETER. Either sensor may be used with a lens and reflector system.
Sensors that respond to light use an active element called a PHOTOELECTRIC cell. Another light-sensing system uses a television camera to pick up information and send it back to the launching site by means of a TV transmitter in the missile.
Electromagnetic sensors use radio or radar antennas as active elements. The phase of guidance determines the location of the antenna in the missile structure. For initial and midcourse guidance the antenna is normally streamlined into the tail of the missile. For final phase guidance the sensor may be located in the nose of the missile.
All of these sensors have advantages and disadvantages. Some are well suited for final phase applications and totally unsuited for initial and midcourse guidance. The advantages and disadvantages of each will be covered in later chapters.
6C3. Reference units
The signals picked up by the sensor must be
compared with known physical references such
as voltage, time, space, gravity, the earth's
magnetic field, barometric pressure, and the
position of the missile frame. The sensor signal
and the reference signal are compared by a
computer, which will generate an error signal if
a course correction is necessary. The error
signal then operates the missile control system.
Gyroscopes are used for space reference.
A reference plan is established in space, and
the gyro senses any change from that reference.
The earth's gravity can be used as a reference;
a pendulum can sense the direction of the
gravitational force. Some gyros are arranged for vertical reference by a pendulous pick-off and erection system. Gyros used in this manner are called vertical gyros; they may be used to control the pitch and roll of the missile.
An instrument called a FLUX VALVE, has the ability to sense the earth's magnetic field, and can be used for guidance. The primary purpose of this device is to keep a directional gyro on a given magnetic heading. A gyro operated in this manner may be used to govern the yaw controls of a missile.
Barometric pressure can be used to determine altitude. A guided missile that is set to travel at a predetermined altitude may use an altimeter to sense barometric pressure. Should the missile deviate from the desired altitude, an error signal will be generated and fed to the control section.
Another pressure-type sensor is used to determine airspeed. It compares static barometric air pressure with ram air pressure. The difference between these two pressures provides an air speed indication.
The axis of the missile frame is used as a reference to measure the displacement of the missile control surfaces. (The movement of the control surfaces cannot be referenced to the vertical, or to a given heading, because the reference would change when the missile position changes.)
Selsyns may be used to indicate the angular position of the flight control surfaces with respect to the missile axis. It is also possible to use potentiometers (variable resistors) for this purpose. When this method is used, the potentiometer is fastened to the missile frame and the potentiometer wiper-arm shaft is moved by the control surface.
6C4. Amplifiers
Each of the sensor units we have discussed produces an output; in most cases this output is a voltage. A computer is used to compare the sensor output voltage with the reference voltage. If the missile is off course, the two voltages will not be the same. The computer will then generate an error signal, which will be used to operate the missile control surfaces and bring the missile back on course.
But the computer output power is usually too small to do the actual work of moving the control surfaces. And the output of a sensor
111
unit is often too small for accurate comparison with a reference voltage. In such cases the missile uses an AMPLIFIER to increase either the signal voltage or power, or both, to a useful value. A transformer is a simple, familiar device that can increase an a-c voltage. The voltage across the secondary winding may be many times as high as the voltage applied to the primary. But the current available in the secondary circuit is proportionately smaller than that applied to the primary, so that there is no increase in power. There is no device that will give out more power than you put into it; in other words, you can't get something for nothing.
In an amplifier, the small power available in the input signal is used to CONTROL the amount of power that is supplied from another source. Thus, in a sense, a relay or a switch is an amplifying device. A small amount of power applied to the relay primary, or to the switch handle, will close the contacts and thus apply a much larger amount of power to the load. But a switch or relay is an all-or-nothing device; the contacts are either open or closed. Many missile applications require an amplifier whose output is not only greater than the input, but also proportional to the input. For example, let's say that a sensor provides a one-volt input to an amplifier, and the amplifier output is 15 volts. Then, if the sensor supplies a three-volt input, the amplifier output must be 45 volts.
Electronic amplifier circuits can be designed to give proportional amplification for a limited range of input voltages. Electronic amplifiers have become familiar devices. An electronic amplifier is used to amplify the output of a record-player pickup to the power level required to drive a loudspeaker cone. Electronic amplifiers are used to amplify the signals picked up by a radio antenna. (But note that, in both cases, the actual power of the input signal is not increased. The input power is used simply to control the power supplied from another source-either batteries or the a-c line.)
At present, most electronic amplifiers are based on vacuum tubes. As you probably know, a vacuum tube is a sealed envelope of glass or metal, from which most of the air has been exhausted. A vacuum tube used in an amplifier circuit contains a cathode, a plate, and one or more grids. The cathode, which is
electrically heated, is connected to the negative side of the power supply. The plate, which is not heated, is connected to the positive side. Under these conditions, an electric current will flow from the cathode to the plate, through the vacuum in the tube. The control grid is usually a spiral of wire surrounding the cathode, and much closer to the cathode than it is to the plate. The voltage applied to the grid can be used to control the flow of current through the tube.
Let's consider a very simple application, in which a vacuum tube is used as a switch. Let's say that we want a relay to operate when light falls on a photoelectric cell (fig. 6C1). If we apply a voltage across a photoelectric cell, and the cell is dark, the current flowing through it will be close to zero. But the current will increase slightly when light falls on the cell. Because the current in the photo tube circuit is only a few millionths of an ampere, it is not sufficient to operate a relay. But if we connect a resistance in series with the photo cell, this current will develop a voltage across the resistance, in accordance with Ohm's law. By using a very large resistance in series with the photo tube we can develop several volts across it, even though the power is very small. This voltage can be applied to the grid of a vacuum tube. Then, when light falls through the photo cell, current will flow through the vacuum tube; when the cell is dark, no current will flow. In this way, the flow of current CONTROLLED by the photo cell may be several thousand times as much as the current that actually flows through it. Finally, we can connect the coil of a suitable relay in series with the vacuum tube, between
Figure 6C1.-Photoelectric cell with vacuum tube amplifier.
112
its plate and the positive terminal of the power supply. Then, when light falls on the photo cell, the relay contacts will close; when the light is removed from the cell, the relay contacts will open again.
A vacuum tube is more often used to amplify an a-c input signal (fig. 6C2). For this purpose, a plate load resistor is connected in series with the tube, between the plate and the positive terminal of the power supply. A changing current through the tube will then produce a corresponding change across the load resistor, in accordance with Ohm's law. In most circuits a steady, negative d-c voltage is applied to the grid. When no input signal is present, this negative "bias" voltage maintains the tube current at about half its maximum value. When an a-c input signal is applied to the grid, it will alternately add to and subtract from the fixed bias. The plate current, and consequently the plate voltage, will follow the input signal, but at a much increased amplitude. The output signal is taken
Figure 6C2.-Vacuum tube used as a-c amplifier.
from the plate, usually through a capacitor. This output can, of course, be used as the input for a second stage of amplification, so that extremely small signals can be built up to useful levels.
For many applications, transistors can be used in place of vacuum tubes. In a transistor, a current flows through a metallic semiconductor, rather than through a vacuum. The flow of current can be regulated by an input signal applied to a third terminal, so that the transistor can be used as an amplifying device. Transistors are less sensitive to vibration
than vacuum tubes; they are considerably smaller, and they require no cathode heating power. On the other hand they are unreliable at high temperatures, and are not available on the market in as wide a variety of types. Finally, they are ineffective at the extremely high frequencies present in many vacuum tube circuits. In guided missile circuitry, transistors have begun to displace vacuum tubes in some applications.
Another amplifying device is the MAGNETIC AMPLIFIER. In its simplest form, this device is basically a transformer with a saturable core, and a third winding in addition to the usual primary and secondary (fig. 6C3). With no current in the third winding, the device acts like a transformer, and an a-c voltage is developed in the secondary circuit. By passing d-c through the third winding, the core can be saturated; there is then no transformer action, and the secondary develops no voltage. A varying input signal on the third winding produces a corresponding variation, of greater amplitude, across the output. Most of the magnetic amplifiers now in use are more sophisticated than the one described here; they have additional windings, and serve a variety of purposes.
A magnetic amplifier is a reliable device because it is rugged, and resistant to shock, vibration, and temperature changes. It is used in a number of missile applications.
Figure 6C3.-Simplified diagram of magnetic amplifier.
6C5. Computer
A computer is necessary in missile guidance systems in order to calculate course corrections rapidly. In one type of missile the computer is simply a mixing circuit. On the
113
other hand, the computers used at launching sites may be large consoles with many stages.
An important function of a computer is the coding and decoding of information relating to the missile trajectory. In order to make the proper selections, the computer uses discriminator circuits to select pulses of the proper width, amplitude, frequency, phase, or time difference, and reject all other pulses. By using a number of different discriminators, a wide variety of pulse characteristics can be handled. The discriminator is relatively insensitive to manmade electrical noises and atmospheric static.
A second important computer function is to compare the signals from the sensor and reference units, to compute the missile's position with respect to the desired reference planes, and to generate error-signal voltages of the polarity and amplitude required to bring the missile back on course.
Computers may be divided, according to the way they operate, into two classes: ANALOG and DIGITAL. An analog computer deals with quantities that are continuously variable. A target bearing angle, for example, is such a quantity; in an analog computer, such a quantity can be represented with considerable accuracy by a voltage, or by the angle of rotation of a shaft. Digital computers, on the other hand, deal only with quantities that vary by distinct steps. For example, an angle might be represented as either 67° or 68°, but not as anything between those values. (A more complex computer might represent the same angle as either 67.43° or 67.44°, but would be incapable of dealing with any value between those two.) An ordinary slide rule is a simple analog computer, in which the position of the slide is "analogous" to the quantity represented. A desk calculating machine, or an abacus, is a simple digital computer.
Both analog and digital computers have applications in guided missiles and their associated ground equipment, although analog computers are more often used. Computers of either class may operate either electrically or mechanically, or by a combination of these two means. In a mechanical analog computer, the input and output variables are usually represented by angles of shaft rotation. The computer performs its various calculations through the movement of shafts, gear trains,
slides, linkages, and other mechanical devices. Computers using these principles have been used to solve navigation and fire control problems for a number of years.
In an electronic analog computer, the input and output variables are represented by voltages, and the computations are performed by electronic circuits. A type of electronic analog computer that has proved useful in missile design is the DIFFERENTIAL ANALYZER. This device is sometimes called a SIMULATOR, because it can be given electrical inputs that simulate both the characteristics of a proposed missile and the conditions under which it will operate. The action of the computer will then show how the proposed missile will perform under the specified conditions. It is thus possible to test new missile designs without building actual prototype missiles, and this procedure results in a considerable saving in both time and money.
6C6. Controllers and actuators
If a missile wanders off its proper course, this fact will be detected by the sensing mechanism previously described. The computer within the guidance system will evaluate the information provided by the sensing mechanisms, determine the direction and magnitude of the error in missile course or position, and produce a suitable error signal output.
At this point, the functions of the guidance and control systems overlap. The primary purpose of the control system is to correct errors in the attitude of the missile. The primary purpose of the guidance system is to correct errors in the missile flight path. Both types of error are corrected in the same way: by moving the missile flight-control surfaces. Movements of these surfaces are governed by the same controllers and actuators, regardless of whether the error signal is developed by the guidance or the control system.
Controllers include such devices as relays, solenoids, magnetic transfer valves, and amplidynes. The actuators that apply power to the control surfaces may be electric, hydraulic, pneumatic, or a combination of these. Both controllers and actuators were described in chapter 5.
114
6C7. Feedback systems
The final section of a guidance system is known as a "feedback" or "follow-up" unit. This unit measures the position of the flight control surfaces in relation to the reference axis of the missile, and compares this value with the error signal generated by the computer.
Without the follow-up signal, there would be nothing but the varying air pressure to prevent the flight control surfaces from swinging to their maximum limits any time the sensor caused an error signal to be generated. By using feedback, the deflection of the flight control surface can be made proportional to the size of the error. The feedback loop thus gradually returns the flight control surfaces to neutral as the error is corrected.
To accomplish these results, the feedback signal is used to oppose the error signal. When the feedback signal becomes as large as the error signal, no further deflection of the flight control surface takes place because the two signals are equal and opposite, and their sum is zero.
If the error signal voltage is large, a large deflection of the flight control surface can take place before the feedback signal voltage
becomes strong enough to exactly equal the error signal.
As the missile approaches the desired course, the error signal becomes less than the feedback signal, and the resultant voltage difference reverses polarity. The reversal in polarity moves the flight control surfaces in the opposite direction until they are in neutral. This action is smooth and rapid, and cannot be duplicated by systems that use ON-OFF switching.
Figure 6C4 shows the relationship between the follow-up and error signals, and shows how the flight path is smoothed by combining these signals. Note how much smoother the lower path is than the upper path, which uses the error signal alone.
The discussion of feedback loops completes the basic discussion of the individual stages of a missile guidance system which is shown in block form in figure 6C 5.
You should remember that block diagrams may vary as to form of presentation, but the final results will be the same. Block diagrams are related to outside factors as well as those inside the missile. By keeping these facts in mind, you will later be able to see how the reference unit may refer to a ground base unit that is setting up reference points. The computer sections may or may not be in the missile.
D. Types of Guidance Systems
6D1. Preset guidance
The term PRESET completely describes one guidance method. When preset guidance is used, all of the control equipment is inside the missile. This means that before the missile is launched, all information relative to target location and the trajectory the missile must follow to strike the target must be calculated. After this is done, the missile guidance system must be set to follow the course to the target, to hold the missile at the desired altitude, to measure its air speed, and at the correct time, cause the missile to start the terminal phase of its flight and dive on the target.
A major advantage of preset guidance is that only limited countermeasures can be used against it. One disadvantage is that after the missile is launched, its trajectory cannot be changed from that which has been preset at the launch point.
6D2. Command guidance
The term COMMAND is used to describe a guidance method in which all guidance instructions, or commands, come from sources outside the missile. To receive the commands, the missile contains a receiver that is capable of receiving instructions from ground stations or from another aircraft. The missile receiver then converts these commands to guidance information, which is fed to the sections following the sensor unit.
We will list several command guidance systems and briefly describe them. Other chapters in this book will describe these systems in more detail.
HYPERBOLIC SYSTEM. Missile trajectories follow many types of curves. Most of the curves that are followed are determined by the position of the missile in relation to the target position. However, one type of
115
Figure 6C4.-Relationship of follow-up to error signal.
exactly predicted path is a hyperbolic course laid out by a loran-type system.
LORAN PRINCIPLE. A loran system is a modern electronic aid to navigation. The name "loran" was derived from the words "LOng RAnge Navigation." The effective range of loran is as much as 1400 miles at night and about 750 miles during the day. The accuracy is comparable to that which can normally be expected from good celestial observations.
Figure 6D1 shows how hyperbolic lines-of position are generated by synchronized transmitters separated by several miles.
A navigator can think of loran as a fairly new method of determining lines-of-position. These loran lines can be compared with other loran lines, with sun lines, star lines, soundings, radar range circles, or bearings, to provide navigational fixes.
Loran lines are fixed with respect to the earth's surface, and their determination is not dependent on a compass, chronometer, or other mechanical device. The signals are on the air and available 24 hours per day, and cover the major part of the seas and oceans of the world.
Loran operates on the following principles:
116
Figure 6C5.-Block diagram of missile guidance system.
1. Radio signals consisting of short pulses are broadcast from a pair of shore-based transmitting stations.
2. These signals are received aboard ship, plane or missile on a special loran indicator.
3. The difference in times of arrival of the signals from the two radio stations is measured on a special loran indicator.
4. This measured time-difference is used to directly determine, from charts, a line-of position on the earth's surface.
5. Two lines-of-position, determined from two pairs of transmitting stations, are crossed to obtain a loran fix.
Since radio signals travel at a constant speed, a direct relationship exists between the time of travel and the distance covered during that time. Therefore, a measure of time, is, in essence, a measure of distance. With these features it is easy to see how loran could be used as the basis for a missile guidance system.
The transmitters are fixed components of a loran system. Because loran is concerned with the measurement of radio signals from two different sources, the transmitters operate in pairs. The function of each station in a loran pair is somewhat different from that of
its companion station, and the names "master" and "slave," given to each describes the part it plays in the operation.
The master starts the transmission cycle by sending out a pulse of radio energy which is radiated in all directions. After traveling the distance between the two transmitting stations, which is known as the "baseline," the pulse arrives at the slave. The signal is received at the slave by a loran receiver and the time of the signal arrival is used by the slave as a reference for the transmission of its own signal.
After the slave has sent its pulse, the whole process is repeated again and again.
If loran is to be used as a form of command guidance, the sensor in the missile must be suitable for loran use. A suitable receiving system is described in chapter 7.
RADIO COMMAND SYSTEMS. Radio has been used as a guidance link for such purposes as model airplane flying, steering model boats and cars, controlling target drones, and even for maneuvering old battleships during bombing tests. Therefore, when the question of command guidance for missiles came up, radio was among the first methods used. But once a radio command system was developed,
117
Figure 6D1.-Hyperbolic lines-of-position generated by two transmitters.
118
a new problem arose-that of keeping track of the missile when it was beyond the range of normal vision.
Since radar can locate objects not visible by ordinary means, it can be used for missile tracking. The radar set transmits a highly directional pulse, which is reflected by objects within the lobe of energy sent out from the radar antenna. The pulse is returned to the radar set as a reflection. The time between the sending of the pulse and the arrival of the reflection can be accurately measured. From this time measurement, the distance to the object can be determined. The course of a missile can be followed by radar, and course correction signals sent by radio.
However, even with radar tracking and radio guidance, it is difficult to keep the missile on course. Consequently, other items have been added to the guidance system.
In order to keep track of the missile, a plotting board can be used. The missile position is determined at intervals, and its successive locations marked (plotted) on a chart. By drawing a line through the successive plots, the missile course can be determined. Once a part of the course has been plotted, the information can be fed into a computer which will determine the desired course for the remainder of the flight.
Since missiles travel at high speeds, mechanical plotters and computers are used in modern systems. Commands to correct the missile course can be transmitted as soon as a deviation from the required course is detected.
The use of radio for command guidance of high-speed missiles makes it necessary to use a transmitter that can do more than send simple ON-OFF pulses. Otherwise, a separate transmitter would be required for each control function. This would require several radio channels for each missile.
In order to get simultaneous operation of several functions, modulated transmissions are used. To overcome other difficulties, frequency modulation using pulse techniques, and radar with pulsed modulation, have been found suitable. The various modulation systems are described in other chapters of this book, along with the advantages and disadvantages of each method.
6D3. Navigation guidance systems
When targets are located at great distances from the launching site, some form of navigational guidance must be used. An example, which shows the need for this guidance method, is the Polaris, which can be launched from a submarine against inland targets.
Accuracy at long distances is achieved only after exacting and comprehensive calculations of the flight path have been made. The mathematical equation for a navigation problem of this type may contain factors designed to control the movement of the missile about the three axes-pitch, roll, and yaw. In addition, the equation may contain factors that take into account acceleration due to outside forces (tail winds, for example) and the inertia of the missile itself.
In this section, we will describe three systems that may be used for long-range missile guidance.
INERTIAL GUIDANCE. The simplest principle for guidance is the law of inertia. In aiming a basketball at a goal, you attempt to give the ball a trajectory that will terminate in the basket. In other words, you give an impetus to the ball that causes it to travel the proper path to the basket. However, once you have let the ball go, you have no further control over it. If you have not aimed correctly, or if the ball is touched by another person, it will miss the basket. However, it is possible for the ball to be incorrectly aimed and then have another person touch it to change its course so it will hit the basket. In this case, the second player has provided a form of guidance. The inertial guidance system supplies the intermediate push to get the missile back on the proper trajectory.
A simple inertial guidance system is shown in figure 6D2. This system is designed to detect errors in the trajectory by measuring the lateral and longitudinal accelerations during the missile flight. To do this, two main channels are used-one for direction and the other for distance.
As shown by figure 6D2, there is some similarity between the two channels. Each contains an accelerometer, which is used to detect missile velocity changes without the need for an external reference signal. The acceleration signals are fed to a computer, which continuously produces an indication of
119
Figure 6D2.-Inertial guidance system.
lateral or longitudinal distance traveled as a result of acceleration. This is accomplished by integrating missile acceleration signals to obtain a missile velocity signal. When the velocity signal is integrated, the result is missile distance traveled. This method of double integration is built into each channel.
An accelerometer, as its name implies, is a device for measuring the force of an acceleration. In their basic principles, such devices are simple. For example a pendulum, free to swing on a transverse axis, could be used to measure acceleration along the fore-and-aft axis of the missile. When the missile is given a forward acceleration, the pendulum will tend to lag aft; the actual displacement of the pendulum from its original position will be a function of the magnitude of the accelerating force. Another simple device might consist of a weight supported between two springs. When an accelerating force is applied, the weight will move from its original position in a direction opposite to that of the applied force. The moving element of the accelerometer can be connected to a potentiometer, or to a variable inductor core, or to some other device capable of producing a voltage proportional to the displacement of the element.
If the acceleration along the fore-and-aft axis were constant, we could determine the speed of the missile at any instant simply by multiplying the acceleration by the elapsed time, in accordance with the formula
v = at
However, the acceleration may change considerably over a period of time. Under these conditions, integration is necessary to determine the speed. This operation in effect makes it possible to multiply a fixed quantity (such as elapsed time) by a varying quantity (such as acceleration). This can be done by dividing the elapsed time into a large number of "increments" of time. If we multiply acceleration by time for each such increment, the result will show the increment of speed during that time. If we add up all the increments of speed, the sum will be a very close approximation to the speed of the missile.
The actual electronic circuits used for integration are rather complex, but here again the basic principle is simple. In one type of integrator the input consists of a series of evenly spaced electrical pulses representing increments of time. The amplitude of each pulse is controlled by the accelerometer, so as to represent the instantaneous value of acceleration. Thus the quantity of electricity in each pulse represents an increment of speed. The pulses are passed through a rectifier (so that no current can flow in the opposite direction) and stored in a capacitor. The capacitor will, in effect, add up all of the input pulses. Thus the voltage across the capacitor will, at any given instant, provide an indication of missile speed at that instant.
If the missile speed were constant, we could calculate the distance covered simply by multiplying speed by time. But because the acceleration varies, the speed also varies. For that reason, a second integration is necessary.
An acceleration may, of course, be applied to the missile in any direction. Thus, if the missile is to determine its own position at any given instant, two accelerometer channels are necessary. For any given acceleration, one of these measures the component of force along the fore-and-aft missile axis; the other measures the component across that axis.
The distance and direction channels are identical in operation. The output voltage of the first integrator indicates the missile velocity. The output voltage of the second integrator is proportional to the distance the missile has traveled.
In order to determine when the missile has reached the target, the distance traveled by the missile must be compared to the known
120
Figure 6D3.-Specified velocity reference.
distance from the launch point to the target. This comparison may be made by setting up a comparison voltage, representing the entire distance the missile is to travel, as an initial condition at the time of launching. This voltage is added, with opposite polarity, to the output of the second integrator. As the missile approaches the target, the output voltage of the distance channel decreases. At zero volts output, the destination has been reached.
This method of determining when the missile reaches the target has the disadvantage of requiring large integrator and comparison voltages if long distances are involved. However, this disadvantage may be overcome by specifying short distance comparison points throughout the flight. The specification of comparison points can be done by a recorder carried in the missile.
Another method that may be used to hold down required voltages for long trips is to specify the velocity and use that as a reference condition on the first integrator output. This method is shown in block diagram form in figure 6D3.
When this system is used, any error above or below the specified velocity is fed to the second integrator. The resultant output is proportional to the missile error in distance at a given time.
Other information on inertial guidance systems will be given in a later chapter in this book.
CELESTIAL REFERENCE. Navigation by fixed stars and the sun has been practiced for years, and is very dependable.
A missile guidance system which uses celestial reference most likely would be made up of an inertial system supervised by a series of fixes on the sun or stars. The gyro that controls the position of the accelerometers is subject to random drift, and the result is an error that tends to increase with time. The
error may be as much as half a mile for a flight that lasts 45 minutes. For longer flights, the error would naturally increase.
One method that may be used to overcome the random drift error involves the use of star sights. The checking is done in much the same manner as a human navigator would check his position by observing an object, such as a star, having a known position.
To make the check, an automatic sextant is mounted on a platform in the missile so that it can be turned on elevation and azimuth axes. An automatic sextant is shown in figure 6D4.
The position data is recorded on a tape, which is placed in the missile prior to launching. The tape is pulled through a "reader" head, which contains a series of contacts that are actuated by holes in the tape. The motor that pulls the tape receives its voltage from a timing circuit. Thus the rate at which the tape is pulled through the "reader" is carefully controlled.
Figure 6D4.-An automatic sextant.
121
Figure 6D5.-Sextant positioning system.
Figure 6D5 shows a sextant positioning system in block form. Note that the elevation servo generator and the azimuth servo generator both receive signals from the tape reader. The generators are connected to servo motors. The shafts of these motors are mechanically connected to the sextant positioning gears, so that the sextant position is actually controlled by the information on the tape.
The position of the sextant is checked by a section called the STELLAR ERROR DETECTION CIRCUIT, which determines whether or not the star is centered in the telescope field. If the star is not centered in the field, an error signal is generated and processed to show the amount of sextant error. The error detection circuit is shown in block form in figure 6D6.
The outputs of this circuit are voltages that are proportional to the missile error in pitch, roll, and yaw. The output voltages are obtained by feeding the starlight picked up by the sextant to a mechanical scanner unit. This unit contains a chopper which modulates the light beam at a given rate. The modulated light beam falls on a phototube, causing the phototube output to vary in proportion to the light intensity.
The phototube output is amplified, rectified, and fed to a resolver that compares the rectified photocell voltage to a fixed reference voltage. The resolver output consists of two error signals, one in azimuth and the other in elevation. The azimuth error is fed to the yaw comparator along with the azimuth commands from the tape. The resultant voltage, obtained by comparing the error and command signals, is the yaw error signal.
The elevation error signal from the direction resolver is fed to the pitch and roll resolver where it is compared to the tape signal. The output of the resolver is divided into two voltages-the pitch error signal and the roll error signal. It is not possible to obtain proportional control with this system because of the delay in signals getting through the circuits, and damping by the rate function. However, the system does tend to return the missile to the correct course as soon as possible without over-control oscillations.
TERRESTRIAL REFERENCE. Three characteristics of the earth's magnetic field that are useful for missile guidance are (1) lines of equal magnetic deviation, (2) lines of equal magnetic inclination, and (3) lines of equal magnetic intensity. Refinements of the
515359 O-59-9
122
Figure 6D6.-Stellar error-detection circuit.
magnetic compass, such as the flux valve, can be used in missile guidance. A complete magnetic guidance system is shown in block diagram form in figure 6D7.
The flux valve consists of primary and secondary windings on an iron core. The primary is supplied with a-c of a fixed voltage and frequency. When no external magnetic field is present, the device acts as a simple transformer; the frequency of the secondary voltage is the same as that of the input voltage. But when an external field is present, it will alternately add to and subtract from the field generated by the primary current, during successive half-cycles. As a result a second harmonic, at twice the input frequency, is superimposed on the output voltage. If the flux valve is properly aligned with the external magnetic field, the amplitude of the second harmonic voltage will be proportional to the strength of that field.
The magnetic guidance system represented in figure 6D7 uses three flux valves; in the diagram they are called the axial orient coil, the transverse orient coil, and the detector
coil. The three flux valves are rigidly secured together, with axes mutually perpendicular. The outputs of the axial and transverse flux valves are used to operate servo systems that control the position of the three-valve assembly. The effect of these servos is to orient the assembly so that its detector coil is constantly aligned with the earth's magnetic field.
The output of the detector coil consists of the 400-cycle input frequency, combined with the 800-cycle harmonic that results from the action of the earth's magnetic field. This combined output is fed to a filter amplifier that amplifies the 800-cycle voltage, but eliminates the 400-cycle signal. The amplifier output is then fed to a frequency divider, which changes the 800-cycle signal back to a 400-cycle signal suitable for operating the missile control system. The amplitude of this signal will be proportional to the strength of the earth's magnetic field.
A 400-cycle reference voltage can be preset before launching, at a value equal to that resulting from any given strength of the earth's
123
Figure 6D7. Magnetic system.
124
magnetic field. The flux valve output voltage can be compared with the reference voltage by a computer. In this way it is possible to guide the missile along any desired line of constant magnetic intensity.
6D4. Beam-rider guidance
We have described some basic electromagnetic (radio and radar) guidance methods and have shown that it is possible to send commands to a missile in order to correct its trajectory. Since the commands are sent on a radio beam, why not use the beam itself for guidance?
PRINCIPLES. The answer to the question is the present beam rider guidance systems. Basically, the system uses the beam pattern of a highly directional radar antenna as a track between the missile launching point and the target. Electronic equipment on the ground modulates the beam in such a way that electronic equipment in the missile can derive guidance instructions from it.
FIXED COMPONENTS. The fixed components of a beam rider system are usually a target-tracking radar, a computer, and a guidance radar. It is possible to combine the guidance and tracking function into one beam. However, this method is not as satisfactory as a two-beam system. Both the one-beam and two-beam systems are described in chapter 8 of this book.
MISSILE COMPONENTS. The missile must contain receiving equipment suitable for picking up and deciphering guidance information. This information must then be converted to appropriate motion of the flight control surfaces. The Navy's surface-to-air missiles are beam riders. However, the system is also used in other applications. Missile components are detailed in chapter 8 of this text.
6D5. Homing guidance
Missile trajectories are divided into three phases (1) launch, (2) midcourse, and (3) terminal. Homing guidance is especially suitable for use during the terminal phase.
At a predetermined distance from the target, the homing guidance system takes over control of the missile flight surfaces from the system used during the intermediate phase of guidance. The purpose of the homing system
is to obtain guidance information from the target itself, rather than from some other outside source.
Homing guidance may be accomplished by one of several types of sensors. Radar sets in the missile may send out pulses, so that the missile may home on the echoes returning from the target. Heat sensors may be used to pick up infrared radiations that can be used for homing. Light sensors may be used to pick up light given off by the target, and the missile can use the signals generated by the light cell for guidance. Television is another homing guidance medium which, while otherwise suitable for this purpose, has limited value because it can be used only in daylight, and only when visibility is good.
6D6. Composite systems
We have shown how several guidance systems may be used. Some of these systems are better suited for one purpose than others. No one system is best suited for all phases of guidance. It is logical then to combine a system that has excellent midcourse guidance characteristics with a system that has excellent terminal guidance characteristics in order to increase the number of hits. Combined systems are known as composite guidance systems.
CONTROL MATRIX. When composite systems are used, components of each system must be carried in the missile. Obviously, the sections must be separated so there is no interaction between them and yet be located close to the circuits they are to control. In addition, some provision must be made to switch from one guidance system to the other.
Control of the missile guidance system may come from more than one source. A signal is set up to designate when one phase of guidance is over and the next phase begins. This signal may come from a tape, an electronic timing device, or from a radio command.
The device that switches control systems is called a control matrix. It automatically transfers the correct signal to the control system regardless of conditions. If the midcourse guidance system should fail, the matrix switches in an auxiliary guidance system to hold the missile on course. Should the original midcourse guidance system become active again, the matrix will switch control from the auxiliary back to the primary system.
125
The matrix can be considered as an automatic guidance switchboard, or guidance sequence computer.
VELOCITY-DAMPING DOPPLER RADAR. One homing guidance system makes use of doppler principles. No doubt you have listened to a train whistle while the train was approaching rapidly. As the train moved past you, its whistle appeared to change in pitch (frequency). This same doppler effect is present in radar waves when there is relative motion between the target and the antenna of the radar.
Doppler homing equipment can be divided into two groups-FM-CW doppler systems, and pulse doppler systems. There are major differences in the circuitry of the two systems. In the FM-CW system, the frequency of an echo signal has a relationship to the speed of the target with respect to the receiving antenna. This echo signal can be converted into an indication of target velocity with respect to the missile.
The difference between the frequency of the transmitted signal and the frequency of the echo is due to the doppler effect. When the two signals are mixed in an electronic circuit, the circuit will develop a "beat" frequency equal to the difference between the two signal frequencies. The beat note developed in this manner will have a pitch that is proportional to the relative velocity between the target and the radar antenna. To eliminate the possibility of homing on objects other than the target, a band-pass filter (which will pass only a narrow band of frequencies) is inserted in the control circuit to eliminate interfering signals.
A receiver which is automatically tuned over the frequency range passed by the filter is used to choose and lock on a target. An
automatic frequency control (AFC), in the missile receiver, maintains the receiver on the selected target. At the closest approach point to the target, the doppler shift becomes zero because there is then no relative motion between the missile and the target. The zero shift can be used to detonate a missile and destroy a target that would otherwise be missed. This system does not provide a means of range measurement. If this feature is desired, additional circuits are required.
A pulse doppler system performs the same functions as an FM-CW system and, in addition, can select a target by its range. Like other pulsed radar systems, it has greater operating range for a given average power output than a CW system.
The guidance control signals are sent as a series of timed pulses. The receiving system in the missile must contain circuits that will match the transmitted pulses in both pulse timing and r-f cycles. The matching is accomplished in electronic circuitry known as the coherent pulse doppler system. In this system the transmissions are short pulses at a repetition frequency that can be continuously varied. Low-intensity power, which is used to obtain phase coherence between successive pulses, is generated by the stabilized local oscillator. A duplexer provides low-impedance paths to keep the oscillator energy in the desired circuits.
The stabilized oscillator also provides a suitable local oscillator signal which is mixed with the receiver signals to generate a receiver intermediate frequency. The doppler receiver contains a type of filter, called a velocity gate, which filters out all undesired doppler frequencies.