In earlier sections of these instruction sheets you learned about the surface and antiaircraft fire control problems, and about the equipment which makes up various systems used to solve the problems.
You saw how Navy ships can attack enemy surface craft, and defend themselves against attacking enemy planes. But another form of enemy attack, which cannot be defended against with main-battery or antiaircraft guns, is the submarine. A ship armed only with surface and antiaircraft guns could put up no defense against this underwater attacker.
The danger of a submerged enemy approaching undetected and attacking uncontested made necessary the developments of antisubmarine weapons capable of destroying undersea craft. The effective use of these weapons, of course, required the development of a suitable fire control system.
On the following sheets you will see similarities and differences between the antisubmarine fire control problem and the surface and antiaircraft problems, and you'll get a general idea of how a typical antisubmarine fire control system works.
H-2
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
Comparison of the Antiaircraft and Antisubmarine Fire Control Problems
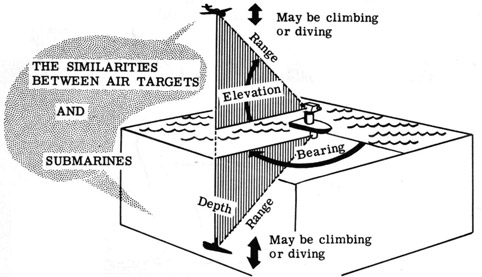
If you think back to the antiaircraft fire control problem and its solution, described in the preceding section of these instruction sheets, it may seem that the problem of hitting a rapidly moving airplane is far removed from the problem of carrying out a successful attack against a relatively slow-moving sub many fathoms below the ocean's surface. Actually, however, the two problems are very similar in many respects. The steps in the solution of the antisubmarine fire control problem are almost exactly the same as the steps in the solution of the antiaircraft fire control problem. In the antiaircraft problem the target's present position is determined by measuring its range, relative bearing and elevation above the ocean's surface. In the antisubmarine problem the target's present position is determined by measuring its range, relative bearing and its depth below the ocean's surface. Air and underwater targets are also related by the fact that both may have vertical velocity components-they may be climbing or
There are several differences between the antisubmarine and the surface or antiaircraft fire control problems which you will learn about on the next few sheets. But bear in mind that regardless of whether the target is above, on, or beneath the ocean's surface, the basic fire control problem does not change, and consists of the five steps with which you are already familiar. Here is an outline of these steps, with the modifications necessary to make them applicable to the antisubmarine problem.
Steps In Solution of the Antisubmarine Fire Control Problem
1. Determine present target position in relation to own ship.
2. Predict future target position in relation to own ship.
3. Stabilize the sonar beam.
4. Calculate required attack course and time to fire.
5. Transmit data to weapons and helm.
H-3
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Nature of the Antisubmarine Fire Control Problem
The modifications to the solution of the basic fire control problem necessitated by antisubmarine warfare are due to (1) the fact that the target is submerged and (2) the nature of the weapons employed.
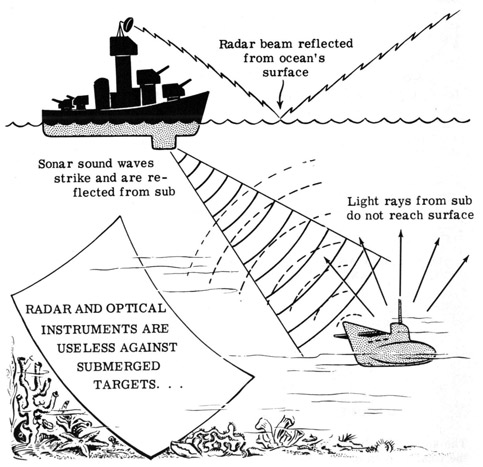
First of all, neither optical instruments nor radar can be used to detect submerged submarines, since neither light rays nor radio waves can penetrate water sufficiently to make these devices effective in locating underwater targets. Radar waves are reflected from the ocean's surface, and light rays leaving the sub are dissipated after they travel a few yards. Therefore sonar, a device which uses sound waves under water in much the same way that radar uses radio waves, is used to detect the target and determine its present position. You will learn more about sonar and how it works a little later.
H-4
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Nature of the Antisubmarine Fire Control Problem (continued)
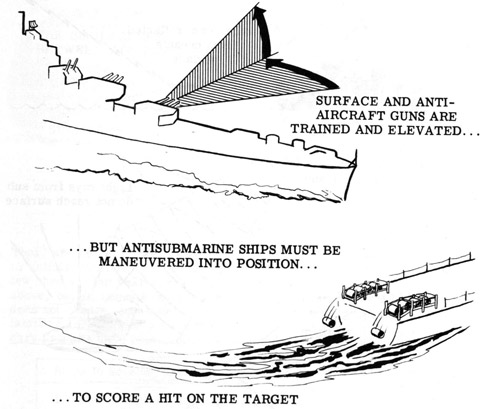
Secondly, modifications to the basic fire control problem solution are necessitated by the nature of the weapons and the manner in which these weapons are used. Surface and antiaircraft guns can be trained and elevated to fire their projectiles at any target within range, regardless of its position or the position of the firing ship. Thus the relative position of gun and target at the time of firing is not critical, except insofar as it affects the gun settings.
On the other hand, the primary weapons used against submarines are depth charges and ahead-thrown missiles. These weapons are either dropped from the stern of the attacking ship, or are thrown a short distance ahead of or to one side of the ship. Thus, in order to carry out a successful antisubmarine attack, it is necessary to maneuver the ship into a position from which the dropped or thrown missiles will sink to the submarine's future position. It is also necessary to compute the correct time for firing.
The antisubmarine problem then becomes primarily a tactical one, in that the final outputs of the fire control system are (1) the course along which the attacking ship must be steered, and (2) the time to fire.
H-5
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
Types of Antisubmarine Attack
You already know that the primary weapons used by surface ships against submarines are depth charges and ahead-thrown missiles. A third type of weapon-the homing torpedo-has been developed, and will be discussed briefly a little later. Right now we are concerned with the manner in which the two standard antisub weapons are used.
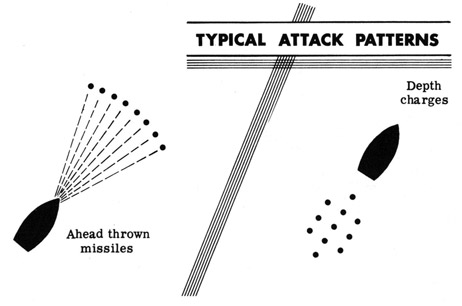
Depth charges, as you know, may be dropped from racks at the attacking ship's stern, or may be fired from side-throwers (K-guns) which hurl them as far as 125 yards to either side of the ship. A depth charge pattern is a plan for dropping depth charges. By proper timing of the release of charges from the stern or by K-guns, any one of several patterns can be dropped. The type of pattern employed depends on the attack situation and number of K-guns carried by the attacking ship. While the attack is always calculated with reference to one or two charges-the center ones of the pattern-the great possibility of an error makes the use of additional charges necessary. Thus if the predicted future position is erroneously calculated, and the center charges miss the sub, one of the other charges in the pattern may strike the target. The charges are set to explode at various depths in the water beneath the surface area covered by the pattern. You will learn more about depth-charge attacks on the next sheet.
The missiles used in ahead-thrown attacks are fired from launchers mounted near the attacking ship's bow. When fired, the missiles travel a fixed distance ahead of the ship, and disperse to form one of several possible patterns. When this type of attack is employed the attacking ship must approach the future target position, instead of passing over it as in the depth-charge attack. The illustration shows typical depth charge and ahead-thrown missile patterns.
H-6
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Problem of a Depth Charge Attack
When a ship armed with antisubmarine weapons makes a sonar contact, the following routine is followed: (1) classify the contact as submarine or otherwise, (2) maintain sonar contact if determined as submarine, (3) solve the fire control problem and attack, and (4) regain sonar contact and reattack if necessary. This routine is the same whether depth charges or ahead-thrown missiles are being employed. The only difference between the two methods of attack is in the solution of the fire control problem, as you will see.
It is up to the Sonarman to acquire, classify and maintain contact with the submerged target. The Fire Control Technician's job is to operate the equipment which solves the fire control problem and directs the attack. Let's see what this problem is for a depth charge attack.
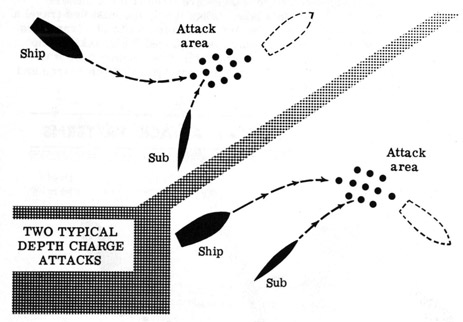
Once sonar contact has been made, present target position determined and future target position predicted, the antisubmarine ship using depth charges is steered on a course which will bring it to the future target position early enough to allow for the sinking time of the charges. The attack course, determined by the fire control system, carries the ship across the sub's course, since the depth charge pattern is most effective under these conditions.
You see, then, that the basic problem in a depth charge attack is to determine the course required to carry the ship across the submarine's bow, and the time to fire to allow for sinking time of the charges. Now let's go on to see how the ahead-thrown missile attack is carried out.
H-7
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Problem of an Ahead-Thrown Missile Attack
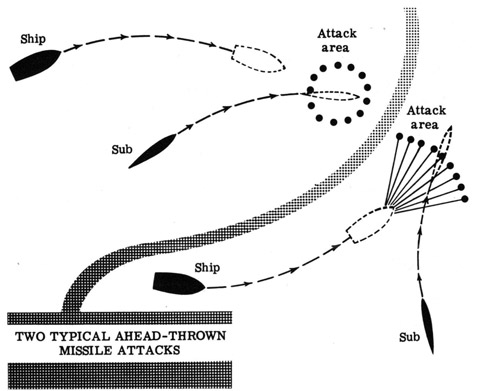
Antisubmarine vessels equipped with ahead-thrown missiles carry out an attack in very much the same manner as when depth charges are used. The major difference is in the course followed by the attacking ship. A course must be determined which will cause the missiles, when fired directly ahead of the ship, to sink to the predicted future target position at the same time that the sub arrives there.
The two ahead-thrown missile patterns shown above are produced by the two types of ahead-thrown missile launchers used on Navy antisubmarine ships. The type of launcher employed depends on the ship's size, and affects the solution of the fire control problem.
Let's summarize the antisubmarine attack problem. When the sonar equipment indicates the presence of a sub, its range and bearing is determined. Since it cannot be seen and its course and speed cannot be visually estimated, successive range and bearing readings are used to determine target course and speed. The fire control system then combines target range, bearing, course and speed with own ship's present course and speed to determine the course required to bring own ship into attack position. At the same time, the time to fire is calculated. This time to fire allows for sinking time of charges or missiles and predicted target motion during flight and sinking time.
Sheet 8 of Section 50, Part H, has been deleted for security reasons
H-9
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Sonar Equipment
You probably have a pretty good idea about what sonar is. You've been told already that it is a device which uses sound waves to detect the presence of underwater objects.
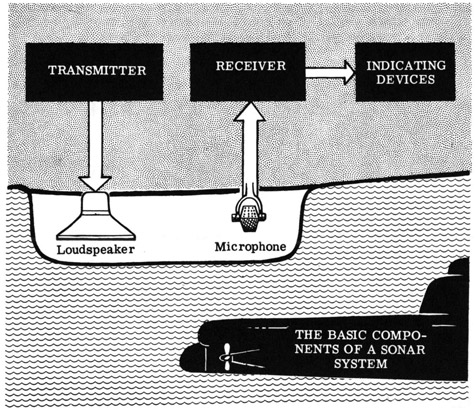
A sonar system consists basically of the following units: (1) a transmitter, (2) a loudspeaker, (3) a microphone, (4) a receiver, and (5) various indicating devices.
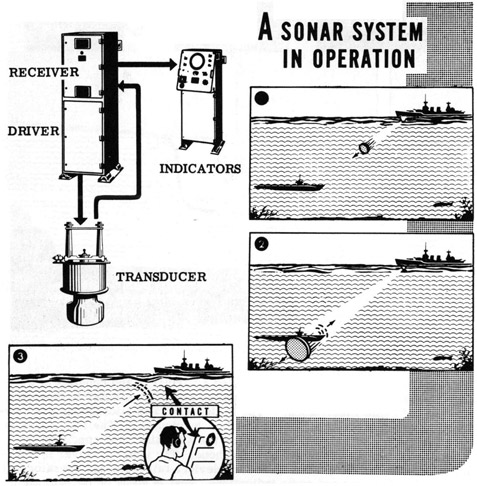
The sonar system's transmitter is called a "driver," and consists of a high frequency audio oscillator and a power amplifier similar to those you studied in "Basic Electronics." The loudspeaker and microphone are combined in a device called a "transducer" or "projector." The transducer is mounted outside of the ship's hull below the waterline, and combines the functions of a loudspeaker and a microphone. The sonar receiver is similar to a radio receiver. The indicating devices tell the sonar operator, by means of both visual and audio indications, what is going on beneath the surface of the ocean around his ship. These indicators include a bearing indicator, range indicator, plan position indicator and other devices.
On the next sheet you will see how the sonar system functions.
H-10
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
How Sonar Works
Here is how a typical sonar system operates. The driver produces a very high frequency audio signal which is sent to the transducer as a series of very short pulses of electrical energy in the audio range. The transducer converts this electrical energy into sound, and sends very short blasts or "pings" of sound waves into the water. The sound waves employed have a frequency which is usually above 20,000 cycles per second, and travel through the water at 4,800 feet per second. If the pings strike an underwater object, part of the sound waves are reflected back to the ship as an echo. These echoes are picked up by the transducer which then acts as a microphone. The sound waves are converted to electrical energy and sent to the receiver, which amplifies the signal and conveys it to the sonar indicators.
By determining the direction from which the reflected sound wave comes, and measuring the time required for a transmitted "ping" to return as an echo, the sonar operator can determine the exact location of the underwater object.
H-11
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
Searchlight and Scanning Sonar
The search sonar systems in use today aboard Navy surface ships comprise two general types-searchlight and scanning. Let's see how each of these two general types works.
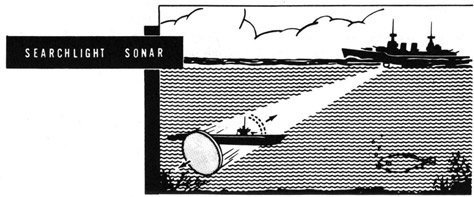
Searchlight sonar sends out a cone-shaped beam of sound. When searching for a submarine, the sound beam is rotated in 5-degree steps. A disc-shaped "ping" is sent out, the operator listens for an echo, then rotates the transducer to move the beam through 5-degrees, sends out another ping, and so forth. The ping sent out by searchlight sonar is a small disc of Round that Spreads out as it travels outward through the water.
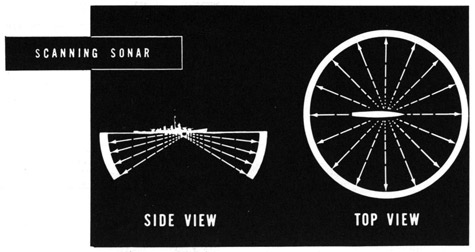
Searchlight sonar was the first type developed. However, when using this type of equipment, about 7 minutes are required to search in all directions around the ship. Therefore, scanning sonar was developed. This type of system sends out a pulse of sound which travels outward in all directions from the ship at the same time. The returning echoes provide a complete picture of the surrounding area without requiring movement of the transducer.
H-12
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Advantages and Limitations of Search Sonar
Sonar means SOund Navigation And Ranging. Sonar equipment can be used to measure the depth of water beneath a ship, to detect the presence of other ships in the vicinity, to determine the location of submarines or other underwater objects, and to conduct underwater communication with friendly ships or submarines. These functions are called "sounding," "listening, " "echo ranging" and "communicating" respectively.
In sounding, special sonar equipment sends a sound wave straight down to the ocean bottom beneath the ship and picks up the resulting echo. The time interval between the transmission and the return of the echo is an indication of the depth of the water.
During listening, the transmitting portions of the sonar system are not used; the transducer simply picks up any sounds in the water due to nearby ships, etc. The receiver amplifies these signals and feeds them to a loudspeaker. Only the direction from which the sound comes can be determined.
Echo ranging, the most important method of operation, is used to locate submerged objects, as indicated on the preceding sheet. You, as a Fire Control Technician, will be concerned with this method, since it is the manner by which your target is located.
Finally, the sonar equipment can be used to communicate with friendly vessels nearby. The sonar operator keys the driver's oscillator, and the transducer sends dots and dashes of sound into the water. The friendly ship or submarine picks up these dots and dashes with its own sonar listening equipment, and replies in code with its sonar transmitting equipment. This method of operation has the advantage of allowing communications to be maintained between nearby vessels during radio silence and poor visibility.
These are the advantages and capabilities of search sonar. It sounds very versatile and powerful, doesn't it? But, as do most things, it has certain limitations. Let's see what they are.
H-13
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Advantages and Limitations of Search Sonar (continued)
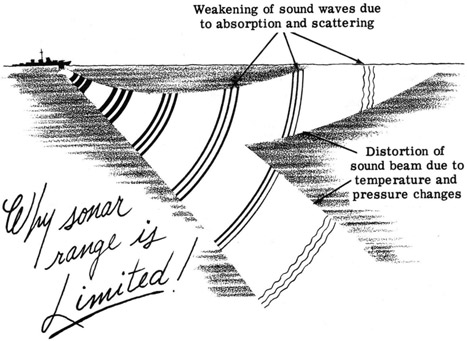
The chief limitation of shipboard search sonar is that its maximum effective range is about 10,000 yards, as compared with the 80, 000-yard range of main-battery radar. Sonar's limited range is due to certain factors which weaken and distort the sound beam transmitted by the transducer, and which also weaken and distort the echo returning from an underwater object. If the transmitted sound wave is so weakened or distorted that it does not reach the submarine, or if the returning echo dies out or is diverted before it reaches the transducer, it is obvious that the sub will not be detected since no echo is picked up by the sonar system.
Transmission losses occur for two reasons as the sound waves travel through the water: (1) because water is not a perfect medium for conducting sound, and (2) due to the scattering effect on the sound waves of foreign matter in the water. These effects cause the transmitted signals, and the echoes, to become weaker and weaker as they travel through the water, until they finally disappear completely. Obviously, then, the maximum range is that to which a transmitted ping will travel and its echo return to the transducer.
The second factor limiting the effective range of sonar signals is that temperature and pressure differences in the water cause the sound beam to be distorted or bent as shown above. This distortion must be taken into consideration when the sonar operator interprets the returning echo.
H-14
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
Depth-Determining Sonar
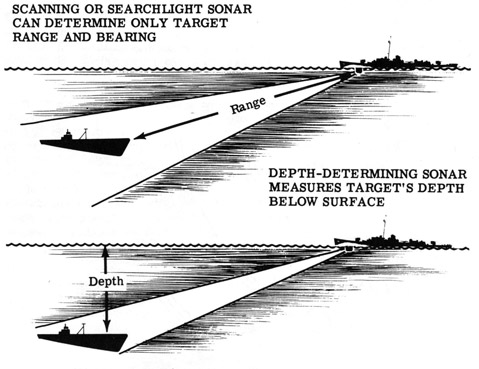
You have seen that for effective antisubmarine fire control, the attacking ship must determine the sub's range, bearing and depth. By measuring the time required for a transmitted ping to return as an echo, the search sonar can determine the target's range; by noting the relative bearing from which the echo returns, target bearing is determined. Scanning and searchlight search sonars can thus get the range and bearing of the submarine, but they have no way of determining the sub's depth. Obtaining this important information is the job of specially designed depth-determining sonar, which is installed in certain special ASW ships as part of the sonar system. Depth-determining sonar uses the same principles of echo-ranging as scanning and searchlight sonar. Its transducer, however, can be tilted to send a sharp sound beam at various angles toward the bottom of the ocean, whereas the sound beams of scanning and searchlight sonar cannot be tilted for the purpose of determining target depth. Depth-determining sonar, then, provides an accurate measure of target depth-a quantity which must be estimated when only scanning or searchlight sonar is being used.
Depth-determining sonar is used in conjunction with searchlight or scanning search sonar. The latter searches for, locates and determines range and bearing of the target. The former is then trained on the target to measure its depth.
H-15
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
Sonar Resolving Equipment
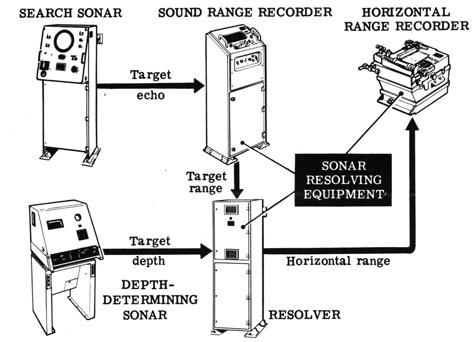
Another equipment which is used in conjunction with the depth-determining sonar is the sonar resolving equipment. This system combines data from the search sonar and the depth-determining sonar to compute the horizontal range of the target. The horizontal range, as you know, locates the point on the ocean's surface directly above the target.
The sonar resolving equipment has three main components-the sound range recorder, the resolver and the horizontal range recorder. The illustration shows the major units and a simplified flow of information.
The sound range recorder receives target echo signals from the scanning sonar, and transmits target range (slant) to the resolver. The resolver also receives target depth from the depth-determining sonar, which it combines with scanning sonar information to compute the horizontal range, which is then transmitted to and recorded by the horizontal range recorder. Both the sound range recorder and the horizontal range recorder are similar to the sonar range recorder already discussed.
Finally, you should know that there is a computer used to determine the angle at which the ahead-thrown missile launcher must be trained when the ship is not exactly on attack course at the time of firing. This is a mechanical computer which requires inputs of target course, speed, range, bearing and depth, missile sinking and flight time, range of weapons, and own ship's course and speed.
Sheets 16 and 17 of Section 50, Part H, have been deleted for security reasons
H-18
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Attack Plotter
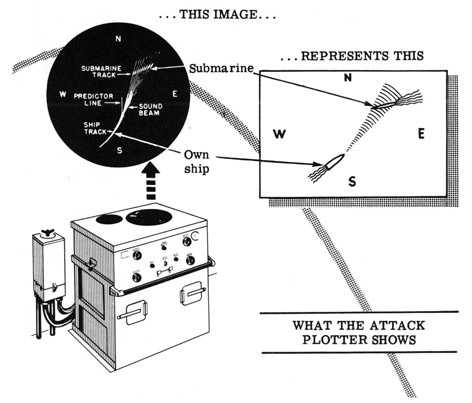
The attack plotter, known as the "AP, " is the television of searchlight sonar systems. It gives you a visual picture of your own ship, the submarine, your sound beam, and the range and bearing for an ahead-thrown attack. All of this is shown by spots of light which appear on the AP screen. Your own ship is represented by a spot of light which flashes automatically every time a ping goes out. The travel of the ping is shown by a small spot of light which moves out across the screen in the direction in which the transducer is trained. When the sound beam contacts an object, and an echo is heard, the spot where the target is located brightens. When another ping is sent out, the spot automatically reappears at own ship's spot and starts out again, leaving a faint trace behind it. The light spots leave marks on the screen that can be seen for about two minutes.
The illustration shows the location of the screen and the image representing the relative position of own ship and submarine shown in the inset. Each long line on the image represents one position of the sound beam.
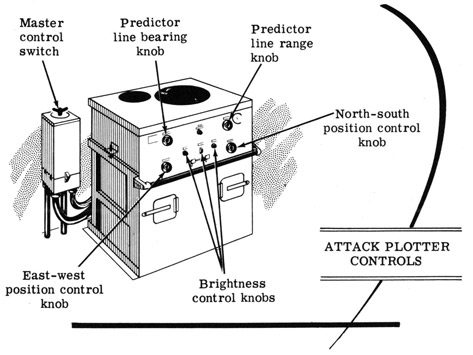
The attack plotter controls enable the operator to shift the position of own ship image as necessary to include the target area. On the next sheet you will see how these controls work and how the AP can be used in an emergency to solve the underwater fire control problem.
H-19
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Attack Plotter (continued)
In addition to receiving range and bearing from the search sonar equipment, the attack plotter receives own ship's course from the gyrocompass and ship's speed from the pitometer log. The AP then automatically moves own ship's spot on the screen at the proper speed and on the proper course. The AP operator positions own ship's spot on the screen by turning the east-west and north-south position knobs shown below. Thus when the sonar is searching toward the east, own ship's spot is positioned in the west, and so forth. In this way the full width of the screen-representing 3000 yards-is utilized.
The master control switch turns the AP on and off, and controls what elements-own ship, sonar beam, "predictor line," echoes-will appear on the screen. The brightness control knobs control the intensity of the light spots on the screen.
The predictor line, shown on the preceding sheet, is a line of light which originates from own ship's spot. The AP operator can control its length and direction by turning the predictor line range and bearing knobs. When the AP is used to solve the fire control problem-if the attack director fails or on ships with no director-the predictor line's length is adjusted to the range of the ahead-thrown weapons. Own ship's course is then directed to bring the end of the line directly in front of the target-far enough in front to allow for flight time, sinking time and target motion. Used properly by an experienced operator, the attack plotter provides an accurate and effective alternate method of antisubmarine fire control.
H-20
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Sonar Range Recorder
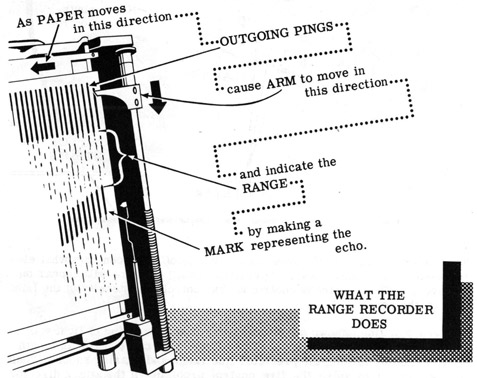
The sonar range recorder puts in writing the echoes heard by the sonar operator. It receives signals from the sonar equipment, automatically records range on a sheet of paper and transmits this information to the attack director. From the written record of range, the recorder operator can determine range rate and estimate the target's course. Let's see how this is done.
During an attack, a sheet of paper travels at a constant speed across the face of the recorder. Each time the projector sends out a ping an arm moves across the paper, representing the travel of the sound wave just as the light spot does in the AP. When an echo returns to the transducer, the arm makes a mark on the paper at the range from which the echo returns. When another ping is sent out, the arm again moves out, and again makes a mark representing the range, but further down on the paper. Thus, as long as the sonar beam remains trained on the target, the range recorder keeps a running record of the range. This is what a typical range recorder plot looks like schematically.
There are suitable scales on the recorder which enable the operator to read range directly and accurately by noting where the echo trace falls. He can determine range rate-the speed with which range is changing-by measuring the slant (slope) of the line formed by the edges of the echo traces. An experienced recorder operator can get a great deal of information by interpreting the recorder plot.
H-21
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
The Sonar Range Recorder (continued)
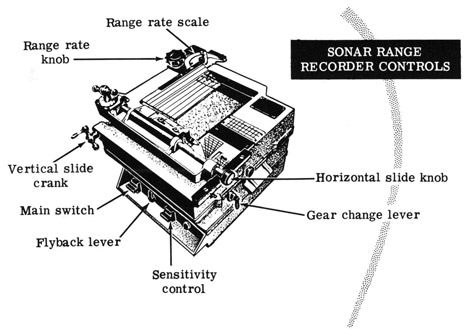
Let's see what else the sonar range recorder can do. You've seen how it is used to indicate and record range, and that range rate can be determined. The operator does this by turning the range-rate knob to line up a marker with the edges of the echo traces, and reading range rate on the range-rate scale.
The recorder has both long- and short-range scales. Ranges from zero to 3700 yards may be read on the long-range scale, and ranges from zero to 1500 yards can be read on the short-range scale. The control used to select the range scale is the gear-change lever, located on the right side of the instrument.
The range recorder can be used as a control station, and when so employed the operator controls the frequency of transmitted pings and gives the order to fire.
After the recorder arm moves across and marks the paper, it closes an electric contact called the "flyback," which returns the arm and causes the sonar equipment to send out another ping. The operator controls positioning of the flyback by means of the flyback lever, and thus has control of the frequency with which pings are sent out. The horizontal slide knob and vertical slide crank control devices which enable the operator to determine the time to fire. The sensitivity control regulates the printing of the echo trace on the paper, making it lighter or darker as the operator chooses. Finally, the main switch turns the recorder on and off, and can be set for standby and test operation.
Sheet 22 of Section 50, Part H, has been deleted for security reasons
H-23
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
Advanced Antisubmarine Weapons
On the preceding sheets you learned how depth charges and ahead-thrown missiles are used against submarines. These are the standard underwater weapons, and when used in conjunction with effective fire control systems they are very effective in antisubmarine warfare. However, this method of attack has certain disadvantages. The modern submarine is capable of maneuvering quite rapidly under water, can dive to great depths, stay submerged for many days if necessary, and can withstand great pressures. This latter fact makes it necessary to score a direct hit or a very near miss to destroy the target. The sub's other capabilities make direct hits hard to obtain. As a result, more effective antisubmarine weapons have been and are being developed. Because of the security classification of these weapons, no details can be included here.
The homing torpedo is a self-propelled weapon which might be considered as an unmanned miniature submarine. Launched from a surface ship, airplane or submarine, it searches for, locates and follows until it hits the enemy submarine. Briefly, here is how it works:
When an enemy submarine is known to be in the vicinity, a homing torpedo is launched. Under its own power it proceeds to the general target area, and then travels in a circular course beneath the surface. When its sonar equipment picks up sounds from a submerged target or echoes from pings transmitted by its own sonar, the torpedo automatically changes course and heads toward the source of the sound or echoes. Then, regardless of how the sub maneuvers, the torpedo changes its course to keep headed toward the target, and continues to do so until it scores a hit.
Further details on this subject are not within the scope of this book, and are covered in more advanced courses. They are mentioned here only to acquaint you with the fact that there are weapons other than depth charges and ahead-thrown missiles for use in antisubmarine warfare.
H-24
INTRODUCTION TO ANTISUBMARINE FIRE CONTROL
What You've Learned So Far
A look at the illustration below will show you that you've come a long way along the road toward learning the fundamentals of fire control. You've learned about the specialized fire control systems used to control main-battery guns, antiaircraft guns and now antisubmarine weapons. You've seen what the problem involves in each case, what the components are of the systems used to solve each problem, and how these components work.
In this section you saw how sonar works and how it is used to locate submerged submarines. You learned about the job of the attack director, attack plotter and sonar range recorder and how the antisubmarine fire control system determines the attack course and time to fire.
Now let's go on to see how the basic fire control system is adapted to the control of torpedoes fired by surface ships.