4A1. Description. Approximately 50 auxiliary
motors of various capacities are located
throughout the ship for operation of compressors,
blowers, pumps, and other miscellaneous
equipment. Current for operation of these
motors is supplied by the auxiliary generator, the
main batteries, or a combination of both, through
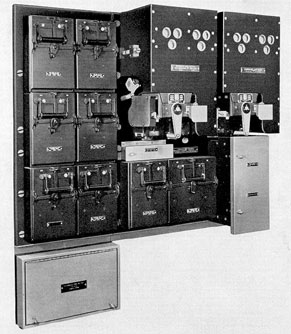
two auxiliary distribution switchboards. The forward
distribution switchboard, connected to the
forward battery, feeds all auxiliary machines in
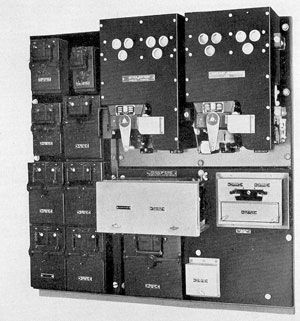
and forward of the control room, while the after
distribution switchboard, powered by the after
battery or the auxiliary generator, feeds all
auxiliary machines aft of the control room. A
bus-tie circuit connects the two switchboards, making it
possible to feed one switchboard from the
other in an emergency.
During normal operation, the bus-tie circuit
is left open and the power for both switchboards
is taken from the batteries, with the auxiliary
generator often floating on the line. The batteries
are connected in parallel through the battery
selector in the main control cubicle. With the
circuit so connected, the auxiliary generator
contributes current not used by the auxiliary load
toward charging the batteries. This circuit
arrangement is also used when the auxiliary
generator is secured.
Figure 4-2. Forward auxiliary power switchboard.
73
Figure 4-3. After auxiliary power switchboard.
4A2. Shore connection. The bus-tie circuit
is equipped with terminals to which an outside
source of power, such as a shore connection or
tender, can be connected for operation of the
auxiliary circuits. The procedure to be followed
in connecting the shore cables for operation of
the auxiliary circuits is as follows:
1. Make certain that both bus-tie switches
are open.
2. Check the polarity of the 250-volt external power supply.
3. Connect the positive lead to the positive
terminal of the shore connection block and the
negative lead to the negative terminal of the
shore connection and energize the circuit.
4. Trip the auxiliary board battery breakers
and close the bus-tie switches on both auxiliary
power switchboards.
5. Current is now available from the
external source through both auxiliary power
switchboards.
To connect shore cables for charging the
batteries, proceed as follows:
1. Place the battery selector lever in the
main control cubicle in the OFF position.
2. Check the polarity of the external power
supply.
3. Bring the shore cables down through the
after engine room hatch.
4. Connect the positive lead to the positive
terminal and the negative lead to the negative
terminal on the battery bus in the control
cubicle.
5. To charge both batteries, move the battery
selector lever to the BOTH BAT. position.
6. To charge a battery separately, place
the battery selector lever on FORWARD BATTERY
or AFTER BATTERY position.
74
B. AUXILIARY MOTORS
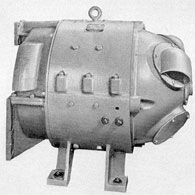
4B1. Description. Auxiliary motors are
direct current motors designed to operate on a
voltage ranging from 175 volts to 345 volts.
Their horsepower rating, type of winding, and
other data are given on the name plate attached
to each motor. Auxiliary motor frames are enclosed
to provide protection against dripping
water and are vented to permit the escape of
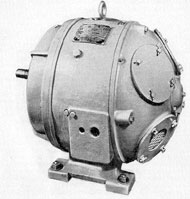
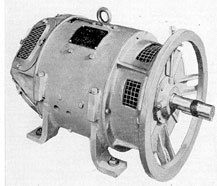
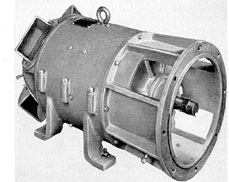
Figure 4-4. D.C. motor for antenna and periscope hoist, equipped with magnetic disk brake.
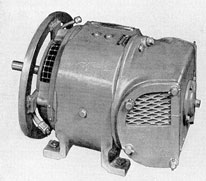
Figure 4-5. D.C. motor for air-conditioning compressor.
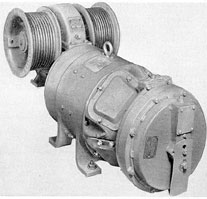
Figure 4-6. D.C. motor for high-pressure air compressor.
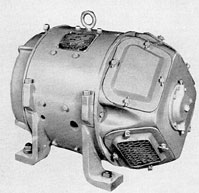
Figure 4-7. D.C. motor for hull ventilation supply fan.
75
Figure 4-8. D.C. motor for battery ventilation fan.
hot air which is forced out by a fan attached
to the armature shaft. Magnetic disk brakes
are used on motors which must stop after the
current is shut off (see Section 4E1). A few of
the various types of auxiliary motors are shown
in Figures 4-4 through 4-10. Their electrical and
mechanical details are similar to those of the
main generators and motors.
Figure 4-9. D.C. motor for drain pump.
Figure 4-10. D.C. motor for trim pump.
76
C. MOTOR GENERATOR SETS
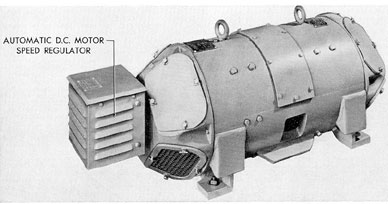
4C1. Description. There are two types of
motor generator sets, lighting motor generator
sets and I.C. ( interior communication) motor
generator sets.
a. Lighting motor generator sets. These
machines are used on some ships to deliver
current for the operation of the lighting system as
well as for the I.C. motor generator sets which
require a lower voltage than that delivered
directly by the battery or auxiliary generator. The
175- to 345-volt d.c. motor receives its power
from the battery or auxiliary generator and
through a common shaft drives the 120-volt
generator. It is controlled by a speed regulator
similar to that described in Section 9A1 for the
I.C. motor generator sets.
NOTE. On some ships lighting motor generator sets
have been superseded by lighting
feeder voltage regulators (see Section 6D1).
b. I.C. motor generator sets. I.C. motor
generator sets are d.c.-a.c. machines equipped
with speed and voltage regulators to produce a
60-cycle current for interior communication,
radio, radar, and sonar systems. The d.c. motor
receives its power from the lighting motor generator
on some ships, or directly from the battery or
auxiliary generator on others.
Figure 4-11. Motor generator set.
D. CONTROL EQUIPMENT
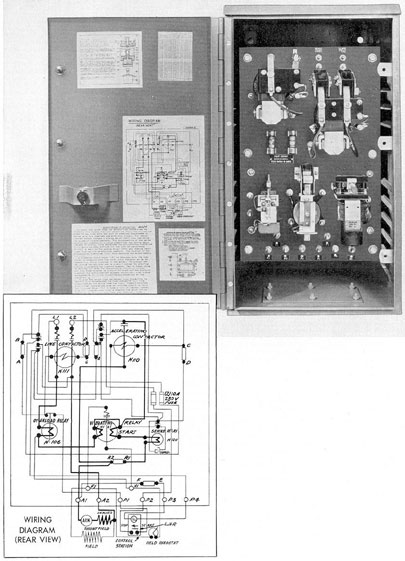
4D1. Magnetic contactor starting panels.
Most of the auxiliary motors are controlled
through a magnetic contactor starting panel with
push-button control for starting and stopping
the motor.
The push-button station may be located
some distance away from the motor in which
case an indicating light in the push-button case
will signify that the motor is running. This light
is connected across the motor armature, or
through an auxiliary contactor in the starting
panel and will burn at maximum brightness
only after the last step of starting resistance
has been cut out of the motor circuit.
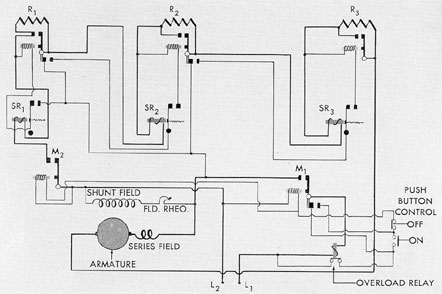
When the ON button is pressed, the coil of
the main contactor is energized, causing the
contactor to close and thus connect the motor to
the line through two or three steps of resistance.
The number of steps of resistance used depends
upon the size, capacity, and duty load of the
motor.
Acceleration is controlled by the action of
adjustable series relays. When the inrush
current decreases to the value for which the relays
are adjusted, the contacts of the first series relay
close and energize the coil of the first accelerating
contactor. This contactor closes and shorts
out the first resistor step. When the second
77
Figure 4-12. Magnetic contactor starting panel.
78
in-rush of current decreases to the amperage for
which the relays are adjusted, the contacts of
the last series relay close. The last accelerating
contactor then closes and shorts out the second
resistor step and places the motor across the line.
NOTE. On controllers of Westinghouse
manufacture, acceleration is controlled by fixed
time delay relays instead of current relays.
The operation of the controller is subject
at all times to the operation of an overload relay
which opens the circuit to the main contactor on
excessive overloads.
Some overload relays are provided with a
time delay mechanism which allows a momentary
overload. The time lag is produced by an
oil dashpot. When the current taken by the
motor rises to approximately 175 per cent of
full load current, a plunger is drawn forcibly
upward against the action of the dashpot,
reaching its upward limit and opening the contacts
in approximately 1 1/2 to 2 seconds.
Thermal overload relays used in some controllers
consist of a heater coil, solder tube, control
contacts, ratchet mechanism, and compression spring.
Under normal conditions, the contacts of the relay
are closed. The spring is then
under compression and tends to open the contacts,
but is prevented from opening them, however, by the
outer part of the solder tube holding the ratchet
mechanism. When the current
to the heater coil becomes great enough to melt
the solder holding the outer part of the tube,
this part of the tube rotates and releases the
ratchet mechanism to open the control contacts.
The opening of these contacts breaks the circuit
to the coil of the contactor handling the power
circuit and this circuit is opened. As soon as the
power circuit is opened, the solder film cools
and hardens, and the relay is ready to be reset
by means of the reset button.
Figure 4-13. Simplified schematic diagram of automatic motor starter.
79
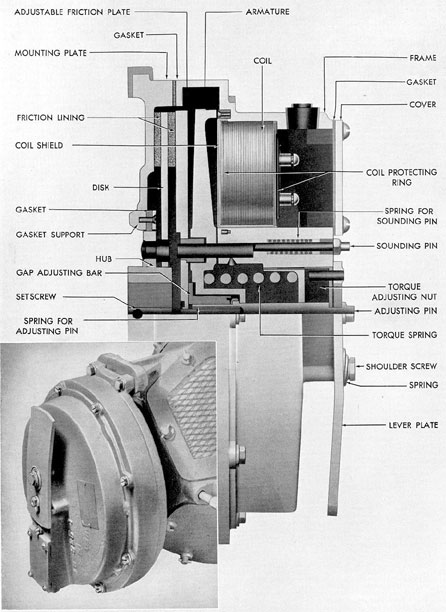
Figure 4-14. Magnetic disk brake.
80
E. MAGNETIC BRAKES
4E1. Description and operation. Magnetic
disk brakes are used on the following auxiliary
motors for stopping the rotation of the armature
after the current has been shut off: periscope
and vertical antenna hoist, bow plane tilting,
stern plane tilting, after capstan, anchor
windlass, bow capstan, bow plane rigging, and
steering gear.
The hub of the brake is keyed on each side
and is attached to the hub so that there is no
relative rotation, but so that the disk may move
axially on the hub. The exposed friction lined
face engages with the stationary friction face
on the mounting plate through pressure of a
spring. The amount of pressure and the resulting
torque can be adjusted by changing the
spring compression. The field, armature, and
coil constitute an electromagnet which overcomes
the spring force and moves the armature
and the adjustable friction plate toward the
field when the coil is energized. This provides
clearance between the friction faces and allows
the motor shaft to turn freely. When the coil is
not energized, the brake can be released by hand
by pulling a lever plate axially away from the
brake magnet. When the lever is released, the
brake resets itself.
4E2. Magnetic gap adjustment. With the
magnet deenergized, measure the amount the
sounding pin can be pushed in. Make a similar
measurement with the magnet energized. The
difference between the two measurements is the
magnetic gap. As the linings wear, the magnetic
gap increases. When the gap approaches the
maximum allowable limit as specified by the
manufacturer, it must be readjusted. Refer to
the manufacturer's instruction book for specific
data and adjustment procedures.