Information about own ship's course (Co) and
own ship's speed (So) is used both in navigating
(dead reckoning) and in plotting and tracking
sonar targets. Own ship's speed is measured by
a device called the underwater log. The term
"log" originated from the earliest method of measuring ship speed. This method consisted of attaching a line with knots tied in it to a log and then
dropping the log into the water. The theory
behind this method was that the log would be
stationary in the water, and by counting the number of knots paid out in a unit of time, the speed
of the ship could be calculated. This early method left a heritage of two names-"knots" and
"logs." The speed of the ship is now measured
with better accuracy by the underwater log. The
speed is indicated on meters in the chart room and
bridge and is used in dead reckoning, plotting, and
tracking of own ship's course on the plotting table.
The speed must be interpreted with information
about own ship's heading for dead reckoning, plotting, and tracking. The north-south (N-S) and
east-west (E-W) components of own ship's motion
are extracted automatically by a device called the
dead-reckoning analyzer (DRA).
The DRA combines the speed information from
the underwater log and the course information
from the ship's gyrocompass and extracts the N-S
and E-W components of the ship's travel. The
information is presented on three counters calibrated in miles-one counter indicates the distance in
miles traveled through the water in the N-S direction, the second indicates the distance in miles
traveled through the water in the E-W direction,
and the third indicates total miles traveled.
The N-S and E-W outputs of the DRA are
transmitted electrically to a large plotting device
called the dead-reckoning tracer (DRT). The DRT
has a mechanism that positions a pencil or a light
beam in two coordinates according to the N-S and
E-W data from the DRA, and some models have
dials that indicate the latitude and longitude of the
ship. A complete dead-reckoning system consists
of a DRA and DRT, uses information from the
underwater log and ship's gyrocompass, and has a
pencil plot and dial indication of ship's position
and path of motion.
The dead-reckoning system and the underwater
log are primarily navigation equipments. Their
outputs are combined with the sonar information
in the attack plotter, which is an electronic instrument used as an aid in making an antisubmarine
attack. The plotter uses information from the
DRA, the gyrocompass, and the sonar to make a
presentation on a cathode-ray tube indicator.
The indicator presents the (1) course of the ship,
(2) path of each searching sound beam, (3) position of an underwater target, and (4) firing range
and proper bearing for the forward-throwing
depth-bomb launcher.
The discussion in this chapter begins with a
brief description of log systems for measuring
speed and distance. The Bendix and pitometer
underwater logs are described. The dead-reckoning system is discussed next. Finally, the attack
plotter is described.
PITOMETER LOG
The pitometer log manufactured by the Pitometer Corporation, is an underwater log-that is,
it uses a rod projected below the keel to measure
speed and distance. The type of pitometer log in
present use is the rotary-balance log. An older
type, the mercury manometer log is no longer used.
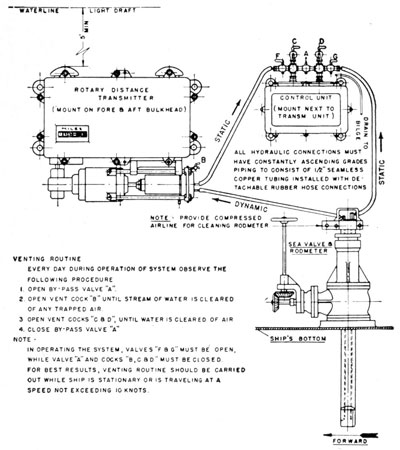
The rotary-balance type underwater log, shown
in figure 11-1, consists of (1) the sea valve and rodmeter unit, (2) the rotary distance transmitter,
(3) the control unit, and (4) indicators.
213
Figure 11-1 -Components of the pitometer log.
Sea Valve and Rodmeter
The rodmeter is a flat tube, 48 inches long. It
has orifices in the leading edge of the tip, and on
each side of the tip. The orifice on the leading
edge develops a dynamic pressure that depends on
the speed of the rodmeter through the water.
The other two orifices develop a static pressure
that depends only on the depth of immersion.
The dynamic pressure is transmitted to the rotary
distance transmitter, while the static pressure is
transmitted to the control unit. The dynamic
pressure, which varies in .relation to the speed of
the ship, is compared to the static pressure, and
the differential is indicative of the speed of the
ship.
The sea valve is a gate valve through which the
rodmeter is projected into the water. When the
ship is docking, the rodmeter is raised and the sea
valve is closed.
Control Unit
The control unit contains two bellows and a
balance bar. One bellows is connected hydraulically to the static nipple of the rodmeter. The
other bellows is connected hydraulically to the
center nipple of the pump on the rotary distance
transmitter. The balance bar between the bellows
has electrical contacts. The contacts, which are
made whenever the pressures in the bellows are
unequal, control the operation of a follow-up motor
on the rotary distance transmitter.
Rotary Distance Transmitter
The rotary distance transmitter consists of (1)
pump, (2) pump-drive motor, (3) follow-up motor,
(4) distance-transmitting unit, and (5) motor-driven transtat (variac). Whenever the two control-unit bellows have unequal pressures in them,
a contact switch is closed in the control unit. The
closing of this switch causes the follow-up motor
in the transmitter to position a movable contact on
a transtat assembly, which in turn controls the
armature voltage of the pump-drive motor. The
drive motor causes the pump to decrease the pressure of its input (the dynamic pressure) so that its
output to the control unit bellows just balances the
static pressure of the rodmeter. When the bellows
have equal pressure, the balance bar in the control
unit is in the center position, the follow-up motor
is not energized, the transtat arm stops moving,
and the drive motor causes the pump to maintain
a fairly constant pressure. There is a slight hunting about the proper pressure.
There is no flow of water through the pump
other than the very small amount required to
expand and contract the bellows. The pump
merely balances the pressures in the bellows.
The pump drive-motor speed depends on the
dynamic pressure from the rodmeter, which in turn
depends on the speed of the ship through the water.
The motor is geared also to two self-synchronous
transmitters. These synchros are located in the
rotary distance transmitter. One synchro is geared
so that its rotor rotates at 60 revolutions per nautical mile, the other at 360 revolutions per nautical
mile. The electrical output (stator windings) of
the 60-revolution synchro is connected to a master
speed indicator, usually located in the chart room.
The output of the 360-revolution synchro is used in
the DRA, which receives the distance information
and combines it with heading information to
extract its N-S and E-W components.
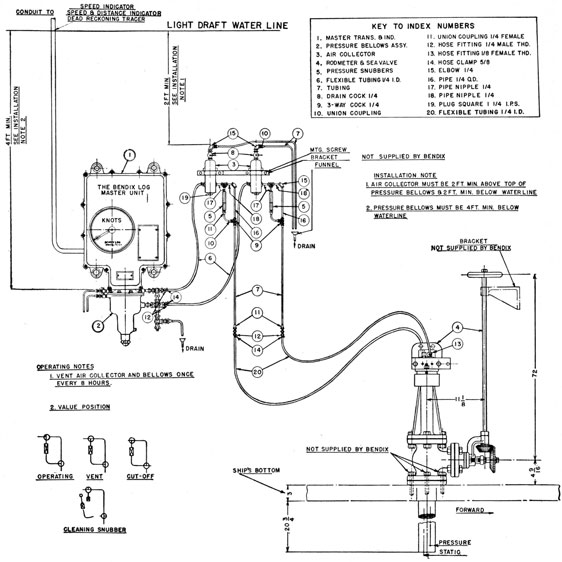
BENDIX LOG
The Bendix log, like the pitometer log, is an
underwater log-that is, it uses a rodmeter extending below the keel of the ship for measuring ship
214
Figure 11-2 -Bendix underwater log.
speed and distance traveled. The Bendix log,
shown in figure 11-2, consists of a rodmeter-valve
assembly and a master transmitter-indicator.
Remote indicators for speed and distance can be
connected to the master transmitter-indicator.
The rodmeter and sea valve are similar to those
of the pitometer log. The rodmeter is raised or
lowered through the sea valve, which can be
closed when the rodmeter is raised. When the
rodmeter is lowered and the ship is in motion, the
dynamic orifice, or pitot orifice, facing the front
of the rodmeter develops a pressure higher than
that in the static orifice on the sides and bottom
of the rodmeter.
The dynamic and static pressures are transmitted to the transmitter-indicator where they
act on a diaphragm between two bellows.
When the static and dynamic pressures differ
the diaphragm moves and closes a contact. This
action causes an actuator motor to move a cam.
215
This cam is attached to a speed indicator. It
repositions the diaphragm toward its neutral
position, and moves gears which position a friction wheel on the surface of a disk. Because the
disk is rotated by a constant-speed motor, the
speed of rotation of the friction wheel depends on
its distance from the center of the disk.
The speed of the ship is indicated by a pointer
attached to the cam. As the cam turns it exerts
a balancing force to return the diaphragm between the bellows to its center position, and thus
stop the actuator motor. A mileage odometer
(Veeder counter) is attached to the output of the
friction disk to register total nautical miles
traveled.
Speed and distance indications are transmitted
by synchros to remote indicators and to the dead-reckoning system.
Dead-Reckoning Systems
FUNCTIONS
The purpose of the dead-reckoning system is to
indicate on dials the ship's position in latitude and
longitude, and to provide a record of own ship's
position relative to a fixed starting point on a
graph or dials. When properly set at the starting
point, the dials indicate continuously and automatically the ship's present latitude and longitude,
computed by dead reckoning. The total distance
traveled by the ship, regardless of course, is indicated on a counter. In addition to total miles,
the system has counters that indicate the N-S
and E-W mileage. The system uses information
from the underwater log and the gyrocompass to
accomplish its functions.
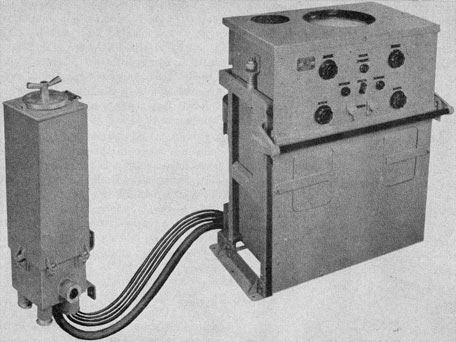
COMPONENTS
The dead-reckoning system (figure 11-3) consists of two major units-the analyzer (DRA)
and the tracer (DRT). The DRA is shown on the
left in figure 11-4 and the DRT on the right.
In the DRA, the distance input, obtained from
the underwater log, is combined with the course
input from the gyrocompass to determine and
indicate on appropriate counters the total distance traveled, as well as the components in
the N-S and in the E-W directions. These distance components are then transmitted to the
tracer by means of the step transmitter.
In the tracer, the signals from the step transmitter actuate motors, which in turn operate a
mechanism for driving (1) the pencil carrier, to
record a geographical plot of the ship's travel, and
(2) the dials, to indicate the latitude and longitude. On some models, a clock mechanism is
electrically connected to the pencil carrier to
record elapsed time on the graphic plot.
Analyzer
The DRA has three parts-the distance converter, the roller carriages, and the ship's course
crank-arm mechanism.
The distance converter consists of the synchro
receiver, G, which drives disks M1 and M2. The
synchro receiver is connected to the transmitter
in the underwater log, which rotates at 360 turns
per nautical mile of travel. Therefore, disks M1
and M2 rotate at a speed proportional to own ship's
speed. The total miles of own ship's travel is indicated directly on the Veeder-Root counter, J.
The roller carriages, P1 and P2, are movable carriages that are positioned on guide rods R1 and R2
by a crank-arm mechanism controlled by the gyro-compass. The position of the carriage on the
guide rod determines the spot at which the roller,
L1, bears against the drive disk, M1. Because L1
is rotated by friction drive from M1, the speed of
L1, depends on its position on M1. A position at
the top of M1 (figure 11-3) corresponds to due
south. A position at the center corresponds to due
east or due west (zero N-S component). Thus the
N-S component of the ship's travel is extracted by
the position of L1 on M1 and is indicated on Veeder-Root counter N1. Similarly, the E-W component
of travel is extracted by disk L2,, which bears
against M2, and is indicated on Veeder counter N2.
The motions of L1 and L2 are transmitted to the
tracer by step transmitters.
The ship's course crank-arm mechanism positions the roller carriages in accordance with information received from the gyrocompass. The
synchro receiver, V, receives the gyrocompass information and moves the brush contact on the front
of own-course dial X. When the brush contact
touches one of the split-ring contacts, it energizes
the course follow-up motor, U. The follow-up
motor moves the crank-arm mechanism to position
the roller carriages. When the split rings on X
are in a position such that they do not touch the
brush contact the follow-up motor stops. The
ship's heading is indicated directly by the own-course dial.
Tracer
The scale to which the ship's course is plotted is
adjustable from 1 to 4 and from 4 to 16 miles
per inch by means of handles on Z1 and Z2. Vernier dials show the scale selected. The scale can
be changed to 200 yards per inch-the scale usually
used in sonar-by a gear changer (not shown in
figure 11-3).
Motors X1 and X2 are 6-pole step motors that
receive signals from the step transmitters O1 and O2
in the analyzer. The transmitter consists of three
contacts and one eccentric that closes the contacts.
As the eccentric rotates it closes the contacts in
succession and causes the step motor to follow the
motion of the eccentric. The motion of the step
motors is translated into motion of the tracing
pencil by mechanical gearing that positions the
pencil in two coordinates. Motor V1 is called the
latitude motor because it positions the pencil in
accordance with N-S motion. Motor V2 is called
the longitude motor because it positions the pencil
in accordance with E-W motion.
Because 1° of latitude equals approximately 60
miles anywhere on the surface of the earth, the
latitude motor, V1 is geared directly to latitude
dials F1, which indicate the latitude of the ship's
position. Because the number of miles corresponding to 1° of longitude varies with latitude,
however, a variable-speed roller mechanism connected to the latitude motor is inserted between
the longitude motor, V2 and the longitude
dials, F2.
Attack Plotter
PRINCIPLES
The attack plotter (AP), shown in figure 11-4,
is an electronic instrument used as an aid in
making antisubmarine attacks. The instrument
uses information from the DRA, the underwater-sound echo-ranging equipment, and the gyro-compass. This information is used by the attack
plotter to develop on the screen of a cathode-ray
tube, a plot which contains (1) the course of the
ship on which the instrument is installed, (2)
the path of each searching sound beam from the
ship, (3) the position of the underwater target
when each sound contact is made, (4) the course
of the target as successive target positions appear,
and (5) the firing range and proper bearing for
the forward thrower so that correct train and
firing time may be determined.
The attack plotter Mk 1 Mod 2 (figure 11-4),
has a cathode-ray indicator and a predictor-line bearing dial on the top face. Positioning
and other operating controls are on the front
surface. The master control is a large 6-position
rotary switch, called a type-JB switch, mounted
adjacent to the attack plotter.
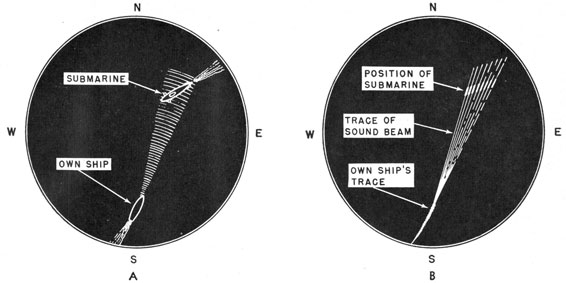
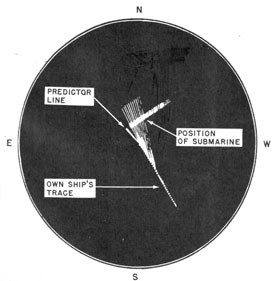
Figure 11-5, A, shows a ship echo ranging on
a submarine. The appearance of the plot on
the AP is shown in figure 11-5, B. Own ship's
position is shown as a bright spot which appears
on the screen each time the underwater-sound
transmitter is keyed. Own ship's course is
depicted by a succession of these bright spots.
The cathode-ray screen has long persistence so
that each spot fades slowly and remains visible
for about 2 minutes in a reasonably dark location.
The path of each underwater-sound transmission
is traced by the sound-sweep, which moves out
across the screen from own ship's last position in a
direction determined by the heading of the transducer. The spot leaves a faint trace marking the
direction of the transmission. Each time the
sound equipment is keyed the spot returns automatically to a new own ship's position. Thus, the
operator must keep the attack plotter in step
with the sound equipment even though the keying
interval is changed.
The trace brightens and leaves a persistent
spot when an echo from a target is received.
The position of this echo spot shows the range
and bearing of the target. A series of echo spots
discloses the course and speed of the target.
The range of the target is desired-not the
total distance the sound travels. The sound
impulses which register an echo from a submarine
at 800 yards, for example, travel 1,600 yards
from the ship to the target and back. The scale
217
Figure 11-4 -Attack plotter, Mk 1 Mod 2.
of the indicator is 250 yards to the inch. Because
the speed of sound in water is approximately
4,800 feet per second, the rate of sound-spot
travel on the screen is 3.2 inches per second.
The plot shown in figure 11-6 can be used to
advantage in (1) helping to identify the nature
of the target, (2) helping the sound operator
regain a lost contact and (3) conning the ship,
when the plot has developed enough to indicate
the target's course.
Figure 11-6 shows the plot of the attack at the
time the ship is approaching firing range. The
bright line pointing ahead of own ship's position
is the predictor line. Its length is adjustable and
can be set to equal the forward throwing range.
Its bearing may be varied through 360° to determine the proper bearing for the forward thrower.
The front end of this line predicts where the center
of the forward-thrower pattern may be placed so
that firing time and forward-thrower train can be
determined. The predictor line can be varied in
length from 190 to 280 yards. It can be made
also 1,000 yards in length. Thus, it can be used
for checking the calibration of the plot.
A major advantage of the attack plotter is the
immediate appearance on the screen of any last-minute maneuver of the submarine. The train
of the forward thrower can be corrected quickly
to nullify the evasive tactic.
A dial called the predictor-bearing dial is adjacent
to the screen (figure 11-4) and gives the true
bearing of the predictor line, which can be set to
indicate the proper train for the forward thrower.
A synchro repeater, type 1-F, can be used to
indicate this bearing at a remote point.
The attack plotter brings together information
from the DRA, the gyrocompass, and the sound
gear. The plot develops immediately with each
ping and echo, and the accuracy of the information may be evaluated continually. Skill is required on the part of the operator to interpret the
plot to best advantage.
OPERATION
Figure 11-7 is a simplified block diagram of the
attack plotter.
It is desired to have the indicator spot represent
own ship's position. This representation is
218
Figure 11-5 -Appearance of plot compared with actual conditions.
accomplished by using the N-S component of own
ship's motion to energize the vertical-deflection
coil of the indicator, thus positioning the spot
vertically on the indicator. Similarly, the E-W
Figure 11-6 -Later stage of typical attack as firing range is
approached.
component of own ship's motion is used to energize the horizontal-deflection coil of the indicator
and thus position the spot laterally on the indicator.
The sound sweep is developed by adding sweep
signals in series with own ship's position signals.
For example, if the transducer is pointed due
north, a sweep signal is applied only to the
vertical-deflection coil. This signal is applied in
series with the N-S component of own ship's signal,
which is continually applied to the vertical-deflection coil. Thus the spot is swept vertically
on the indicator, and begins its sweep at own
ship's position.
The plot is developed by having the vertical
sweep of the indicator represent the N-S components of both the sound-beam motion and own
ship's motion. Similarly, the horizontal sweep
represents the E-W components of the sound-beam
and own ship's motion. Own ship's motion must
be added to the sound-beam sweep because the
speed of sound in water is slow and there is motion
of the ship between successive pings.
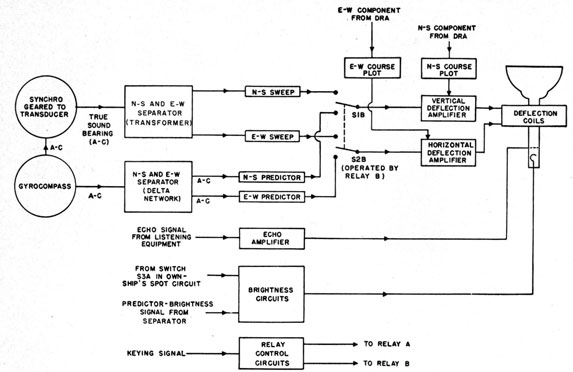
The simplified block diagram in figure 11-7,
illustrates the principles of operation of the attack
plotter. It shows that the N-S and E-W components of the sound sweep are obtained from a
219
Figure 11-7 -Simplified block diagram of the attack plotter.
separator and then applied to the vertical- and
horizontal-deflection amplifiers. It shows also
that the N-S and E-W components of own ship's
motion are received from the DRA and are applied
to the deflection coils.
The spot is deflected on the indicator by three
signals-(1) own ship's position, (2) the sound
sweep, and (3) the predictor line. The three
signals appear on the indicator, as shown in figure
11-6. Note that own ship's-spot signals are
impressed on the deflection amplifiers at all times,
and that the sound-sweep and predictor signals
are impressed (with own ship's-spot signals)
alternately by the switch.
As in conventional PPI indicators, targets are
indicated by modulating the intensity of the
sweeping spot. The spot is brightened also by (1)
a signal from the circuit of own ship's spot, to
intensify the spot that indicates own ship's position, and (2) a signal from the predictor circuit,
to intensify the predictor line. The intensified
own ship's spots, predictor line, and target returns are shown in figure 11-6.
Own Ship's Spot
Own ship's spot is an intensified spot that indicates own ship's position. Each sound sweep
starts at own ship's spot. The position of the
spot is determined by the N-S and E-W components of ship's motion as received from the step
transmitters in the DRA. These two signals are
applied to the vertical- and horizontal-deflection
coils to move own ship's spot on the face of the
indicator. The operator can locate own ship's
spot anywhere on the face of the indicator by
rotating the E-W and N-S positioning controls.
The complete block diagram and the circuit
schematic are shown in figures 11-8 and 11-9
respectively.
The E-W and N-S components of own ship's
travel are received from the step transmitters in
the DRA (figure 11-3). These signals cause the
step motors in the attack plotter to follow the
motion of the eccentric in the step transmitters.
Step transmitters and motors were described
briefly in the explanation of the DRA and DRT.
The position of the spot on the indicator is
determined by the grid bias on the deflection
amplifiers V503 and V504 in figure 11-9. The
bias is controlled by the ring-potentiometers R142
and R143, which determine the charge on capacitor s C503 and C509. The ring potentiometers
are simply voltage dividers that determine the
charge on the capacitors and thus the bias of the
deflection amplifiers. The position of the movable
contact of the ring potentiometers is controlled
by hand or by step motors through a slip clutch.
The hand controls are used to position the spot
on the face of the indicator. The step motors
cause the spot to follow own ship's motion.
Sound Sweep
The sound sweep is the trace that indicates the
path of the searching sound beam. The sweep
starts at own ship's spot each time the transducer
is energized. It is shown in true bearing by taking
the output of a synchro transmitter (used as a
control transformer) geared to the transducer and
energized by the gyrocompass. The N-S and E-W
components of the true sound bearing are extracted
in T501 and T502.
The input to these transformers comes from the
three rotor leads of the control transformer. The
rotor of the control transformer is connected
mechanically to the sound head, and the three
stator leads are connected electrically to the ship's
gyrocompass.
The purpose of transformers T501 and T502 is
to split the angular input voltages into two rectangular components of direction-one to the N-S
sweep unit, and one to the E-W sweep unit, as
shown in figure 11-7.
The voltage fed to the N-S sweep unit no longer
contains complete sound bearing sense. It contains a voltage which is proportional only to the
N-S bearing. Similarly, the voltage fed to the
E-W block contains a voltage proportional only
to the E-W bearing.
In the case of the N-S branch, the voltage is
highest when the sound projector is directed
exactly north or exactly south, and zero when it is
directed exactly east or exactly west. Between
these limits the variation is sinusoidal.
In the case of the E-W branch, the voltage is
highest when the sound projector is directed
239276°-53-15
exactly east or exactly west and zero when it is
exactly north or exactly south.
Although the voltage is highest in both the
north and south positions of the projector (in the
N-S circuits), the two conditions are different. In
one direction the voltage is in-phase with the reference voltage whereas in the other direction it is
shifted 180° out-of-phase.
Both the reference voltage and N-S bearing
voltage are fed into the N-S block, where the N-S
sweep voltage is developed. This block represents
a rectifier and filter circuits connected to give a
"discriminator" circuit. The only purpose of this
circuit is to combine the reference and bearing
voltages, both of which are a-c, and to deliver a
d-c voltage which bears the essential characteristics.
The output of the discriminator circuit varies in
much the same way as the a-c input to it; that is,
when maximum in-phase a-c voltage is fed in,
maximum d-c positive voltage is developed.
When zero a-c voltage is fed in; zero d-c voltage
is developed. When maximum out-of-phase a-c
voltage is fed in, maximum d-c negative voltage
is developed. Between the maxima, the variation
in the d-c output voltage is sinusoidal because the
a-c input is sinusoidal between these points.
Note that the change of phase of the a-c input
results in change in polarity of the d-c output.
In the case of the N-S circuit, positive d-c
voltage is developed if the sound projector is north
of east or west. Negative d-c voltage is developed
if the projector is south of east or west.
Thus, the N-S and E-W block may be considered to be nothing more than power supplies,
the output voltage and polarity of which are
governed by the true bearing of the sound projector. The vector sum of the two output voltages (N-S and E-W) is always a constant quantity because the input to both, before splitting, is
derived from the same control transformer.
The two channels may not be perfectly balanced
in practice because of nonuniformity of the component parts. For this reason a separate adjustment is provided for each channel. These adjustments are accomplished by sweep length adjusters
and are identified by the numbers "6" and "7" in
the block diagram, figure 11-8 and by resistors
R504 and R514 in figure 11-9.
The rectified signal from the discriminator
charges capacitors C511 and C505 through various
221
resistors to develop the E-W and N-S deflection
signals. The sweep rate is determined primarily
by the rate of charge of capacitors C511 (for E-W
deflection) and C505 (for N-S deflection). The
constants are fixed to produce a sound sweep of
3.2 inches per second, corresponding to a scale of
250 yards of range per inch deflection.
The sweep outputs of the phase-sensitive discriminator are negative or positive voltages that
are added to the potentials of capacitors C509 and
C503-the own ship's spot capacitors. As was
shown previously, the potential across C509 and
C503 determines the position of own ship's spot.
By adding the sweep signals to the own ship's
signals, the sound sweep is made to start at the
own ship's spot each time the transducer is energized. Note that the return side of sweep capacitors C505 and C511 is connected to own ship's
spot capacitors C509 and C503. Thus, the deflection amplifiers receive sweep and own ship's spot
signals simultaneously.
The transformer, T503, connected to the cathode s of phase rectifiers V501 and V502 has an
output signal which is used to intensify the
predictor line, as will be described later.
Predictor
The predictor line is a virtual "yardstick"
which may be placed on the viewing screen in the
form of a streak of light. This line may be
directed toward any point of the compass, may
be adjusted to any one of a number of standard
lengths, and may be turned on and off at will.
Unlike the sound sweep, and course plot, the
predictor is independent of associated equipments
or operations aboard own ship. It is, however, a
measuring device which enables the operator to
recommend a course or some definite bearing for
training forward-thrown weapons.
The predictor positioning voltages are developed
in a manner similar to that of the sound sweep,
previously described, except that the predictor
voltages are a-c instead of d-c such as those used
in the sound sweep circuits. The use of a-c voltages in the predictor permits the use of simple
RC circuits instead of the more complex rectifiers
and discriminators used in the d-c circuits.
A differential type of synchro unit (35 in figure
11-8) is supplied with true-bearing voltage from
the gyrocompass and delivers true-bearing voltage
to the N-S and E-W separator.
The differential synchro is at the panel of the
attack plotter itself and is rotated by means of a
control knob. The predictor unit is constructed
with a detent at relative bearing 000°, and may be
turned smoothly through an angle of 20° each side
of this bearing, or ship's heading. This arc
represents the possible training of the forward-thrown weapons. Beyond this 20° point, the
control chatters with a characteristic ratchet action
as it is turned, but operates normally otherwise.
The chatter is an indication that the predictor
line is trained beyond the limits of the weapons.
The three voltages developed by the predictor
control synchro (35 in figure 11-8) are coupled directly into the separator. Here, the N-S and
E-W components are separated by a resistance
network. The output of the separator consists
of two separate a-c voltages the magnitudes and
phasing of which depend on predictor bearing.
The voltages directed into the N-S and E-W
blocks vary with predictor true bearing. At due
north the N-S block receives maximum in-phase
voltage while the E-W block has zero input. At
due south the N-S block receives maximum out-of-phase voltage while the E-W block still has zero
input.
At true bearings due east and due west, the N-S
block has zero input and the E-W block has maximum input-in phase in one case and out of phase
in the other.
The terms "in phase" and "out of phase" are
used to express a relation of the a-c predictor
deflection voltage to the synchro power line.
Because the signals to the scope are a-c the sweep
starts at the position of own ship's spot, and, in
the case of a due-north signal, is swept in a N-S
direction at a rate dependent on the line frequency.
The phase of the incoming signal determines which
half of sweep is brightened by the voltage from the
synchro powerline. In the case of a due-north
signal, only the, northern half of the signal is
brightened.
If the predictor bearing is changed to the due-south position, the phase relationships of the predictor voltage and the brightening voltage are
reversed by 180°, resulting in the brightening of
the opposite, or southern, half of the sweep.
In short, the relative amplitudes of the input
signals determine which direction the sweep travels
from own ship's spot; the phase relation of these
input signals and the brightening voltage determine which half of the sweep is presented on the
screen.
Echo Channel
The brilliance of the sound sweep is kept low
so that it is just perceptible. The echo from the
underwater sound gear is amplified in the echo
amplifier and applied to the control grid of the
cathode-ray tube to brighten the sweep at the
instant an echo is received.
The first amplifier stage, V301 (figure 11-9), is
disabled for a short interval after each ping is
transmitted so that reverberation noise is not
received. The length of time that the echo
amplifier is disabled is made equal to the time
required for relays A and B to operate. When
both relays are operating, as when the predictor is
in use, 0.15 second is required. When only the A
relay is operating 0.075 second is required.
The lock-out voltage is taken from a plate of the
gas tube in the relay-control circuit. When gas-tube V304 fires, to initiate the relay action, its
plate voltage is lowered by resistor R356-7. because the plate voltage for each amplifier is taken
from the plate of the gas tube, the echo amplifier,
V301, is disabled until capacitor C351 charges.
The echo amplifier is a variable-mu (remote cut-off) type-6SK7 pentode. When the signal input
exceeds +2 ½ volts, grid current flows, the grid
bias increases and reduces the gain of the stage.
The result is avc action for all signals exceeding a
minimum value.
The coupling capacitor C305 and shunt capacitor C304 are proportioned so that the amplifier
response falls off rapidly on either side of 800 cycles
per second. This narrowing of the response reduces the output noise.
Tube V302 is a cathode follower. Because the
cathode potential is held at about +20 volts by
bleeder current from B+, the tube is normally cut
off. Thus the plate current of the cathode follower follows only the positive portions of the
signal, and the tube V302 passes only the positive
half-cycle of the a-c signal.
When echo-switch S111 is in the full position,
the output of V302 is coupled unchanged through
C308 to the grid of the cathode-ray tube. When
the switch is in the short position, the signal must
pass through one section of twin diode V303. The
cathode of this section is returned to ground
through a 0.05-μf capacitor. As the diode conducts, it charges the capacitor positive and biases
the diode to cut-off. Thus the first part of the
signal from V302 passes through the diode and
then the signal falls off. This action causes the
echo to be shortened, making it more distinguishable from noise and reverberation.
Blanking and Brightening
In the following time sequence, the cathode-ray
spot is (1) blanked out during retrace, (2) made
bright momentarily to develop own ship's spot, (3)
brightened and blanked alternately to form a
bright predictor line, (4) brightened slightly to
form the sound sweep, and (5) brightened considerably to form the echo return. Figures 11-7,
11-8, and 11-9 show the blanking and brightening
circuits.
When the trigger key fires the type-884 gas
tube, V304, the voltage at the plate of V304 is
depressed. This drop in potential is applied to the
grid of the cathode-ray tube through R321 to
blank out the spot during retrace. Retrace occurs
when relay A discharges the sweep capacitors.
The own ship's spot is formed when the A relay
snaps into the sweep position. When this action
occurs, capacitor C360, in the cathode circuit of
the cathode-ray tube, discharges through R533
and part of R383. This discharging produces a
negative pulse at the cathode of the cathode-ray
tube, which brightens the spot momentarily.
The voltage for brightening the predictor line
is the a-c voltage obtained from a winding of T503
in the discriminator circuit. This a-c voltage is
coupled to the cathode of the cathode-ray tube
whenever switch S502-3 is operated by relay B.
The negative peaks of the a-c voltage brighten the
beam and make the predictor line visible.
When the sound sweep occurs, the sweep intensity is adjusted by hand control R140 so that
the sweep is barely discernible. The echo is
positive in polarity and brightens the beam when
it reaches the grid of the cathode-ray tube.
Relays A and B
The separate functioning of individual circuits
in the attack plotter is included in the foregoing
discussion. The description which follows shows
how the circuits are coordinated-that is, how the
223
relays are timed with respect to each other and
with the external equipment.
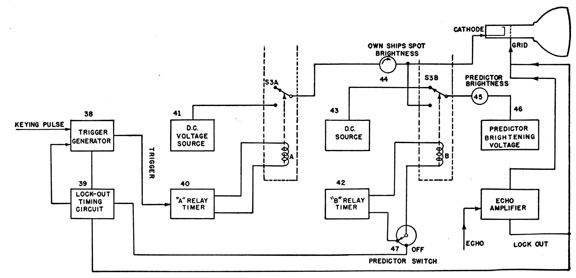
The circuits associated with timing are shown
on both the complete block diagram (figure 11-8)
and, more clearly, on the smaller block diagram
(figure 11-10). In the following discussion all
numbers of units refer to figures 11-8 and 11-10.
In the smaller block diagram, the entire echo
amplifier circuit is represented by a single block
into which the echo and lock-out voltages are fed.
The output consists of the echo signal which is
turned off periodically by the lock-out voltage.
The starting point of the cycle of operation
is the closing of the sound key which delivers an
electric impulse to trigger generator 38. The
generator converts this impulse into a suitable,
sharp, trigger which is then used to "trip" the A
relay timer, 40.
The trigger generator, 38, is employed to ensure
a uniform trigger for tripping timer 40-not to
amplify the keying impulse as might be expected.
The timer consists of a vacuum-tube circuit
and relay, so arranged that the relay is de-energized
(up, on the diagram) when the circuit is in its
quiescent, or at-rest state. A negative impulse
fed into this circuit upsets the at-rest state and
causes the relay to be pulled down (energized)
immediately. The relay remains down for about
0.075 second, when the timer finally returns to its
at-rest state. It opens then, and remains open
until the next trigger appears.
When the A relay is pulled down, the sound
sweep is retraced; when it opens, the sweep capacitor proceeds to charge again. These operations
were described with the discussion of the sound
sweep circuit. The A relay operates three contact
arms two of which are used in the sound sweep
circuits. Only the third contact arm, S3A, is
shown in figure 11-10.
The third contact arm is used to develop a
trigger for tripping the B relay timer, 42, and for
impressing own ship's spot-brightening on the
cathode-ray tube. A source of positive d-c voltage,
41, is connected to the lower contact point, while
the arm is connected to both the B relay timer,
42, and the cathode-ray tube, through a control,
44. The control is used to adjust the brightness of own ship's spot.
Each time the A relay is pulled down, the B
relay timer and the cathode-ray tube are connected
to the d-c voltage source, 41. When the A relay
opens, both are disconnected from this source. In
order to investigate the effects produced by the
opening and closing of the circuit, the nature of
the voltage delivered to the two load circuits must
be considered.
Both the cathode-ray tube and the B timer
circuits utilize capacitive input coupling. This
Figure 11-10. -Block diagram of relay and timing circuits.
224
fact is important because it allows the "make" and
"break" of S3A to produce entirely different effects.
Because the d-c voltage source, block 41, represent s positive voltage, voltage of this polarity is
applied to the load circuits when the relay contacts close. The voltage is applied to the cathode
of the cathode-ray tube and, being positive, does
not brighten the spot. It does act like a blanking
voltage but, because the tube is already blanked
by a voltage on the control grid, no net effect
results.
Similarly, the voltage applied to the B relay
timer when the A relay closes, is also positive.
The timer can be tripped only by a negative
voltage; a positive voltage produces no effect on it.
Thus, upon closing, the A relay S3A produces no
visible results. Only the upper two contact arms
of the A relay are in service; they discharge the
sweep capacitors and cause the retrace of the spot
to own ship's position. The contacts, S3A, never-the-less do perform an operation-they charge the
coupling capacitors in the cathode-ray and timer
circuits. These capacitors become fully charged
in much less than 0.075 second so that, when the
relay is ready to open, the capacitors are in the
completely charged condition.
Opening S3A leaves the coupling capacitors with
a full charge and they proceed to discharge immediately through return circuits of their own.
This effect produces the same result as if a negative
voltage were suddenly applied to the timer and to
the cathode-ray tube.
The negative voltage which appears at the
cathode of the cathode-ray tube produces a
momentary brightening effect. This brightening
causes own ship's spot to appear, because the
sweep circuits have been discharged and only own
ship's position voltage is applied to the deflection
amplifier.
The negative voltage which appears at the B
relay timer "trips" the circuit so that the B relay
is energized. The timer, which is similar to the A
relay timer, holds the B relay in the down position
for about 0.075 second and than allows it to return
to the up position.
When B relay is pulled down, predictor voltage
is applied to the cathode-ray tube by means of the
upper two contact arms (not shown in figure
11-10). The lower contact arm, S3B, applies
predictor brightening voltage to the cathode of the
cathode-ray tube.
During the time that the A and B relays are
performing their operations, it is important that
the control grid of the cathode-ray tube not be
allowed to affect the brightness of the spot. Any
sounds which might be picked up by the receiver
during this time would interfere with the presentation of own ship's spot and the predictor line.
In order to keep the picture "clean" only own
ship's spot and the predictor brightening should be
allowed to affect the brightness. This requirement is fulfilled in two ways-(1) by disabling the
echo amplifier, and (2) by applying a blanking
voltage to the control grid of the cathode-ray tube.
Own ship's spot and predictor brightening voltages
are made great enough to overcome the blanking
voltage at the grid.
A lock-out timer, 39, is incorporated to develop
the grid-blanking and amplifier-disabling voltages.
This timer, like the A relay timer, is tripped by
the trigger generated in block 38 and remains in
action for a definite period of time. This time is
about 0.15 second when the predictor is in use-that is, when A and B relays are both in operation.
The output of the timer is called lock-out voltage
and is applied both to the echo amplifier and to the
control grid of the cathode-ray tube.
The lock-out voltage is negative and effectively
cuts off beam current in the cathode-ray tube.
The lock-out timer, 39, also supplies lock-out
voltage back to the trigger generator, 38. The
result is a self-locking effect on the generator.
Thus the generator is prevented from responding
to any further impulses from the sound key until
the relay cycle is completed. The need for this
feature is obvious; once the cycle is started it
should be allowed to be carried out to completion
before another is started.
The preceding information is based on the
assumption that the predictor is in use, because as
explained earlier, the B relay operates only under
these conditions. When the predictor is turned
off, the B relay is disabled by the predictor switch,
47.
With the predictor off, the relay cycle is reduced
to about 0.075 second. To compensate for this
shorter relay cycle, the predictor switch makes
connection with the lock-out timer, in the off
225
position, shortening its time constant from about
0.15 to about 0.075 second. The shortening is
effected by using the B relay plate voltage to
speed the recovery time of the lock-out circuit
after it has been fired by the trigger.
Although the predictor switch in figure 11-10
includes a total of three sections, only one section,
47, is shown. The other two sections are used for
range selection and are shown in the complete
block diagram, figure 11-8.
After the A and B relays have completed their
complete cycle of operation, which requires about
0.2 second, they reach a quiescent state, and
remain in that state until the next trigger pulse.
In this quiescent state the electron beam is
swept outward from the position of own ship's
spot on the scope, in a direction corresponding
to the bearing of the azimuth sonar equipment.
The audio voltages from the receiver of the associated sonar are amplified in the AP and applied
to the grid of the CR tube to brighten the sweep
at a position proportional to the range of the
target.
Thus, the AP provides the ASW officer with a
running summary of the target movements. In
the future, improved models of this equipment
may be placed aboard ships of the Navy, but the
basic principles of operation which have been
described will probably be unchanged.
Mk 5 Plotting System
With the recent development of the underwater
fire control systems, the Mk 5 plotting system has
been designed.
This plotter automatically plots the position of
own ship, two radar targets, two sonar targets, a
time marker every 60 seconds in place of own ship,
and the generated position of a target that is set
up on the position keeper. These targets are
plotted on an illuminated sheet of paper by imprinting a distinctive symbol in a position corresponding to the location of each of the objects to
be plotted. The sequence of plotting, interval of
plotting, and scale to be used are all variable.
The symbols used are:
Own ship
black dot
Sonar 1
black dot
Sonar 2
black dot
Radar 1
triangle
Radar 2
empty square
60-sec own-ship marker
circle with dot in center
Generated plot
empty circle
In addition to the automatic plotting, the
system analyzes any one of the targets plotted,
and indicates the course and speed of that target
on suitable dials.
The system consists of (1) Mk 5 plotter,
mounted on the bulkhead of underwater battery
plotting room, (2) a Mk 63 control panel mounted
at the side of the plotter, and (3) a Mk 55 or
Mk 75 computer located underneath the plotter.
The Mk 55 and Mk 75 computers are identical
except that the Mk 75 uses miniature components,
and is much smaller in size. They function in
exactly the same manner.
The operation of the Mk 5 plotter is controlled
by the Mk 63 control panel. Besides the various
controlling switches for the system, the control
panel provides remote indications of target courses
and speeds computed by the computer which
works in conjunction with the Mk 5 plotter.
The computer automatically computes rectangular coordinates of the objects to be plotted from
the bearing and range information that is fed to
it. These rectangular coordinates, transmitted
electrically to the plotter, are used to position the
plotting arms of the Mk 5 on the plotting paper,
corresponding to the position of the input bearing
and range. The computer also transmits course
and speed of the target selected.
When a correct analyzed solution is being transmitted from the computer, a correct solution light
mounted adjacent to the indicator dial is lighted.
The indication of the dial should be used only
when this light is on.
A problem clock is provided on the control
panel to indicate the elapsed time on the problem
or contact and serves to correlate the various fire
control stations and observers to the same time.
A counter indicates the elapsed time of the
present analysis period.
A time-base selector permits selection of the
period of duration of the analysis and also determines whether the analysis is automatically repeated or manually started and stopped. When
the switch is set in either the 4-minute or the 12-
226
minute position, a button marked "Analysis start
and reset" must be depressed to initiate an analysis. Depressing the button illuminates the analyzing light adjacent to the speed dial of the
course-and-speed indicator, showing that the
machine is prepared for an analysis.
After illumination of the analyzing light, the
next bearing and range of the station under analysis are stored by the analyzing elements and
serve as a reference point for computing the
course and speed on each subsequent observation
by that station for the duration of the analysis.
When the time of the analysis period has been
exceeded, the analyzing light and the solution
light are extinguished, but the limit warning light
remains illuminated. The analysis start-reset must
then be depressed to clear the mechanisms for
analyzing a new target. This equipment may be
set automatically to initiate and terminate the
analysis of the various speeds and courses.
In the plotter itself the sequence of plotting
may be set so that any of the four targets and own
ship may be plotted in the order desired. If the
information from the targets is continuous, the
unit may be set so that it plots each of them in
a selected time interval. If the information is
not being transmitted continuously, the unit
may be operated so that it plots in a fixed sequence,
but plots one target, then waits for information
to be transmitted to determine the position of the
next plot. If the position of the target is not
transmitted within a preselected time interval
the equipment automatically goes on to the next
target.
The equipment is provided also with a mode of
operation in which the target information may be
telemetered from an assisting ship. The mode
can be initiated by turning the telemeter cycle
switch to the input of the assisting ship. The
enemy range and bearing from the assist ship
(telemetered synchro information) is fed into the
plotter computer as though it were a range and
bearing from own ship.
When this information is used, two offset-measuring potentiometers are coupled mechanically to the positioning arms. Next the assist
ship is plotted and the N-S and E-W components
of the distance between own ship and assist ship
are measured and stored in the potentiometers.
The telemetered information from the assist ship
is then presented to the plotter computer. This
information is then altered by the stored information in the offset potentiometers, and the target
is plotted in its true geographic position. After
the enemy position has been plotted the potentiometers return to zero and are ready to repeat the
cycle.
Enemy course and speed can be analyzed from
the telemetered information and presented just as
though the observations were made from own ship.
Another feature of the equipment is that the
scale of the area around any of the targets or own
ship can be expanded in any desired ratio to
provide more accurate information.
The Mk 5 plotter provides the ASW officer with
a complete running summary of the situation, permitting him to make accurate decisions quickly
in conning his ship.