One of the most critical problems encountered
by the Allies early in World War II was the submarine menace. Almost five thousand merchant
ships were sunk and more than twenty million
tons of war supplies were lost by enemy action.
The struggle against enemy submarines was
successful because we were able to detect and
locate them whether they were surfaced, submerged, underway, or lying in wait.
The majority of enemy submarines attacked
were detected and located by sonar. To date,
sonar has been the most effective method of detecting completely submerged submarines. Other
methods such as radio, radar, and infrared, have
proved ineffective because their range of transmission in sea water is practically nil.
The development of SONAR during the period
between the wars was an unspectacular, slow but
steady conquest over the physical elements of the
sea, culminating during and since World War II
in one of the Navy's largest research and development programs. The word "SONAR" abbreviates
SOund, Navigation, And Ranging, and includes all
types of underwater sound devices used for listening, depth indication, echo ranging, ship-to-ship
underwater communication, and other uses. The
importance of sonar in naval warfare cannot be
overemphasized.
This text is divided into two general parts-(1)
a brief discussion of the physics of sound propagation in an ideal medium, followed by a presentation
of the peculiarities and limitations of sea water as a
medium for the transmission of sound, and (2) a
general study of the design and function of representative sonar equipments.
In planning this text it has beep assumed that
the reader has a knowledge of elementary physics,
mathematics, and electronics.
Characteristics of Sound in an Ideal Medium
IDEAL MEDIUM
The peculiarities and limitations of sound
transmission in sea water are understood more
easily if sound is first thought of as being transmitted in an ideal medium. Such a medium is
assumed to be homogeneous, infinite in extent,
and perfectly elastic. A homogeneous medium
has the same properties throughout, such as
temperature, pressure, salinity, and density. The
infinite extent of the medium permits omission of
boundary reflections. Perfect elasticity means
that the medium, when distorted or displaced,
returns to equilibrium with no loss of energy by
internal friction. It is obvious that the properties
of sea water differ greatly from those of an ideal
medium. Nevertheless, a discussion of sound
transmission in the two media is advantageous.
SOUND AND PRESSURE WAVES
Most wave motion can be classified as either
longitudinal or transverse. Sound waves are
longitudinal and are characterized by the vibrating particles of the medium moving forward and
backward parallel to the direction in which the
waves are propagated.
The waves are composed of alternate compressions and rarefactions in the medium. The term "sound" is used in two senses-subjectively, it
denotes the auditory sensation experienced by the
ear, and objectively, it denotes the vibratory
motion which gives rise to that sensation. This
motion is often called the stimulus. All stimuli
do not produce sensations of hearing, because the
average ear responds to sounds in the frequency
range from approximately 16 cycles per second to
1
15,000 cycles per second. This range is known
as the sonic frequency range. Frequencies above
15,000 cycles per second, although not within the
range of response of the average ear, are useful and
can be detected with proper instruments. These
frequencies are known as ultrasonic frequencies.
The dividing line is not sharply defined; many
people-particularly young persons-can hear
above 15,000 cycles per second; but some standard
must be adopted, and 15,000 cycles per second is
used as the arbitrary dividing line. Before
rockets and aircraft attained speeds greater than
the speed of sound, frequencies above 15,000
cycles per second were designated as supersonic.
However, it is now agreed that the term "supersonic" designates velocities greater than the
velocity of sound and the term "ultrasonic"
means frequencies above 15,000 cycles per second.
EQUATION OF WAVE MOTION
The period, T, of a vibrating particle in a
medium is the time in which it completes one
vibration, and the frequency, F, is the number of
vibrations completed per second. Frequency is
expressed as "cycles per second (cps)," "kilocycles
(kc)," and "megacycles (mc)." In such units
"cycles" is understood to mean "vibrations per
second." The maximum displacement from the
undisturbed position is called the amplitude of
vibration.
Two wave motions vibrating with the same
frequency have definite phase relations. They
are in phase when they continue to pass through
corresponding points of their paths at the same
time. For any other condition they are out of
phase. They are in phase opposition when they
reach their maximum displacement in opposite
directions at the same instant.
The wavelength is the distance, measured along
the direction of propagation, between two corresponding points of the wave train.
The general relation that exists among the frequency of vibration, the velocity of propagation,
and the wavelength of wave motion in any medium
is equally applicable to the propagation of sound
waves in sea water. A body which is vibrating at
a definite rate produces a disturbance that moves
away as a wave in the surrounding medium. In
the time, T, the vibrating body completes one
vibration, and the wave advances a distance equal
to its wavelength, λ, so the velocity of the wave is
v=λ/T. Because the period, T, is the reciprocal of
the frequency, F, it follows that the wave velocity
is
v=Fλ. (1-1)
In this equation the wave velocity, v, is determined completely by the properties of the transmitting medium and is independent of the frequency of the source and of the wavelength. When
F changes there must be a corresponding change in
λ so that the equation may be satisfied.
INTENSITY OF SOUND WAVES
The intensity of sound waves is proportional to
the amount of energy passing per second through
unit area at right angles to the direction of propagation. Both kinetic and potential energy are
present in a sound wave. The average kinetic
energy equals the average potential energy, and
the total energy at any time equals twice the average of either kinetic or potential, or the total
energy equals the maximum of either kinetic or
potential. Therefore the total energy of the sound
wave may be determined by computing the maximum kinetic energy of all the molecules which are
moving back and forth out of their equilibrium
positions as the wave passes. If the sound wave
is simple harmonic motion, the maximum velocity,
u, of a vibrating particle of the transmitting
medium is 2πaF, where a is the amplitude, and F
the frequency. The maximum kinetic energy of
one particle, which also equals the total energy, E,
of this particle, is
E=½mu2=½m(2πaF)2 ergs/particle.
Let the density of the medium be ρ gm/cm3. Then
if the density, ρ, is substituted for the mass, m,
the result is the energy density or the energy per
unit of volume-
E=½ρu2=½ρ(2πaF)2 E=2π2ρa2F2 ergs/cm3. (1-2)
The loudness of a sound wave, which determines
the strength of sensation, and its ease of reception
depend upon the intensity, I, which is the energy
2
transmitted per second per unit area perpendicular
to the direction of propagation. In 1 second the
sound wave disturbs a volume of medium of length
v, where v is the velocity of propagation. The
intensity is therefore the energy in a column of
medium of length v and unit cross section, the
volume of which is v cm3. Equation (1-2) for
energy per unit volume or the energy density
must be multiplied by v to find the intensity-
I=2π2ρa2F2v ergs/cm2sec. (1-3)
From this result it is seen that the intensity of
sound is proportional to the (1) square of the
amplitude, (2) density of the medium, (3) velocity
of propagation, and (4) square of the frequency of
vibration.
A more practical concept of sound intensity is
in terms of pressure variations which occur at all
points in the transmitting medium as the sound
wave advances. The greater the pressure variations, the more intense is the sound wave. It can
be shown that the intensity is proportional to the
square of the pressure variation at all frequencies.
For most practical purposes, sound intensity in
terms of pressure units is preferred to energy
density or energy flow because of the ease of
measuring sound pressure.
Decibel System
The values of pressure, p, encountered in practice, range from about 10-4 to 106 dynes/cm2. It is
customary to express sound levels, L, in terms of
the logarithm of sound-intensity ratios-
L=C log(I/Io) = C log(p2/po2), (1-4)
where C is a constant that depends upon the units
used, and Io is a specified value of sound intensity
that is chosen as a standard of reference. In
practice, C is taken as 10 and the corresponding
unit for L is called the decibel (db). It follows
that the pressure level of sound, or simply the
sound level, L, is given by the equation,
L=10 log I = 20 log p db. (1-5)
The logarithm is to the base 10.
Two reference units of pressure are in common
use. These units are 1 dyne/cm2 and 0.0002
dyne/cm2. Both units have been used with
underwater sound, but 1 dyne/cm2 is used here,
unless otherwise stated. In keeping with international practice, the unit 0.0002 dyne/cm2 is
used as a reference intensity for airborne sound.
If I exceeds Io, L is positive, or the sound level
is said to be "up" L db with respect to reference
level Io. If I is less than Io, L is negative, or the
sound level is said to be "down" L db with respect
to reference level Io.
Sound Propagation in an Ideal Medium
INVERSE SQUARE LAW
In a study of underwater sound it is important
to understand how the sound intensity varies as
the waves advance out from the source. Consider the most elementary condition-that of a
very small radially pulsating sphere being placed
in the medium. Its waves spread out spherically
and affect the whole space occupied by the
medium. If E (watts) is the total energy emitted
from the source per second, the sound intensity
I' at a concentric spherical surface of radius, r'
(yards), is
I'=E/(4πr'2) watts/yd2.
At any other concentric surface of radius r"
(yards), the sound intensity I" is similarly
expressed-
I"=E/(4πr"2) watts/yd2
or
(I'/I")=(r"2/r'2). (1-6)
Thus the sound intensity at any surface varies
inversely as the square of the distance of that
surface from the sound source. This relation is
commonly known as the inverse square law.
The inverse square law can be stated more
simply by letting I be the intensity at any range,
r, and I1 the intensity at unit range (source intensity). Equation (1-6) becomes
I=I1/r2. (1-7)
Equation (1-7) expressed in the decibel system
becomes
L=L1-20 log r, (1-8)
3
where "L=10 log I" is the sound level (db) at
range r and "L1=10 log I1" is the sound level at
unit range. The quantity, L1, is called the source
level.
Because graphic presentation of data is often
necessary for the interpretation of the principle, it
is helpful to become familiar with the appearance
of the foregoing equation plotted in different ways.
The inverse square law, as expressed in equations
(1-7) and (1-8), can be presented graphically in
various ways.
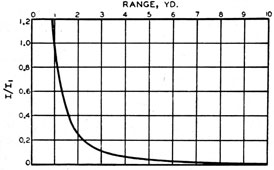
In figure 1-1 the abscissa is proportional to r,
Figure 1-1. - I/I1 as a function of range.
and the ordinate is I/I1 or 1/r2. This method of
presentation is not useful because the graph
approaches too close to the horizontal axis to be
visible beyond about 10 yards.
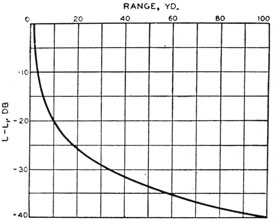
This objection is overcome by plotting
L-L1 = 10 log (I/I1) = -20 log r (1-9)
as ordinate against r as abscissa. Such a graph is
shown in figure 1-2. The expansion of the scale
for small values of I/I1 into large negative values of
L-L1, makes such a graph useful over a wider
interval of ranges.
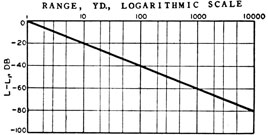
A third type of graph also uses L-L1 as the
ordinate but uses log r instead of r as abscissa.
Figure 1-3 is the graph of equation (1-8) plotted
in this way. This graph has two advantages-a
much greater interval of ranges can be presented,
and the graph of the inverse square law is a
straight line.
The foregoing discussion of the inverse square
law was based upon the assumption of a point
Figure 1-2. - L-L1 as a function of range.
source of sound. It must be recognized that the
character of the sound field is altered materially
with a departure from a point source. In the
ocean, the sound sources that come into consideration differ widely. Hulls of ships are large sources,
emitting noise with a complicated spectrum.
Sound projectors are moderately large sources,
emitting relatively pure tones or sound of controlled frequency bands. Very small bubbles of
air may become secondary sources of sound.
Any source can be considered to be divided into
elementary areas, each of which acts as a point
source of sound. If the linear dimensions of the
source are small compared to the wavelength of
the sound, the differences in the distances from a
remote point in the sound field to any two elementary areas on the surface are small compared to the
wavelength. Thus waves from the two elementary areas arrive at the remote point substantially
at the same time. Under this condition the waves
from the elementary areas add. The sound, moreover,
Figure 1-3. - L-L1 as a function of range with the range being
plotted on a logarithmic scale.
4
is radiated uniformly in all directions. Under this condition the source can be called small.
If a source of simple harmonic waves is large
compared to 1 wavelength, the waves do not arrive
at a given point at the same time. Hence, there
are interference effects, and the intensity radiated
in some directions is greater than that radiated
in others. It will be shown later that these
interference effects are the basis for directional
projectors.
If the source is large, for example a ship, and
emits noise rather than single-frequency sound, the
more obvious interference effects disappear. The
intensity radiated in some directions, however, is
still different from that radiated in others.
INFLUENCE OF DIRECTIVITY
A problem of basic consideration in sonar is the
control of the distribution of sound energy radiating from a source. The reader is now familiar
with the inverse square law and the general deviations from it when the sound source is not small.
If the sound energy emitted by a source is confined
to a cone or beam of small angle, the intensity is
greater at a given distance than it would be in
the case of a point source radiating uniformly
in all directions. Such concentration of sound
energy within a narrow beam is called directional
transmission.
Equation (1-8) which gives the sound level in
any direction at a range, r, may be altered to give
the level in a directional sound field. This
alteration could be accomplished by assigning a
different value to the source intensity, I1, for each
direction; however, a simpler procedure is to designate the intensity at 1 yard in an arbitrary direction as the source intensity. The intensity in any
other direction can then be obtained by multiplying by an appropriate factor determined by the
direction. In the case of a sound projector that
concentrates most of its energy in a beam, the
value of the intensity at 1 yard from the source in
the direction of the axis of the beam is considered
to be the source intensity. Let the source intensity be Ia and let the intensity at 1 yard from the
source in a direction making an angle θ with the
axis of the beam be equal to I1(θ) (read "I1
of θ"), and the ratio of I1(θ) to Ia be equal to b(θ). Thus-
b(θ)=I1(θ)/Ia. (1-10)
Then equation (1-7) becomes
I=I1(θ)/r2
I=Iab(θ)/r2 (1-11)
In converting to the logarithmic form, let La be
10 log Ia. La is called the axial source level.
Because b(θ) is usually a proper fraction, its
logarithm is negative and represents a reduction
in sound level. To avoid confusion in use of
signs, it is better to express this reduction as a
positive number and subtract it than to add it as
a negative number. It is therefore defined as
B=-10 log b(θ). Thus equation (1-11) converted to logarithmic form becomes
L=La-B-20 log r db. (1-12)
The quantity, B, is called the beam pattern, or
directivity function. If equation (1-10) is expressed
in logarithmic form, B is defined by
B=La - L1 (1-13)
At all points on the axis, B=0, because b(θ) is
unity. Under this condition, equation (1-12)
becomes equation (1-8).
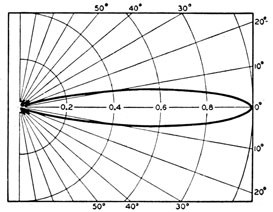
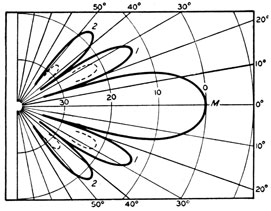
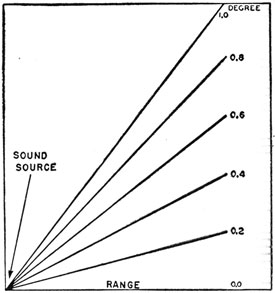
Figures 1-4 and 1-5 show polar graphs of the
function b(θ) and B for the same projector. These
graphs have been calculated theoretically for a
vibrating rectangular plate, the side of which is
about 4 wavelengths long.
The graph of b(θ) (figure 1-4) shows that most of
the sound is projected in directions which make
Figure 1-4. -Beam pattern of a projector.
5
Figure 1-5. -Beam pattern of figure 1-4, with the ratio of (I1(θ)/Ia)
expressed in decibels.
angles of less than 10° with the perpendicular to
the plate. The radii represent the value of b(θ).
Note the difficulty of showing the side lobes.
However, the very weak radiation at greater
angles is important in some cases. Consequently,
the graph of B (figure 1-5) is useful, because
the logarithmic scale emphasizes these small
intensities.
In figure 1-5 the maxima M, 1, 2, and others not
shown are called lobes. M is the main lobe. For
sonar bearings to be accurate, the main lobe
should be narrow. The side lobes, 1 and 2, are
detrimental for many purposes, and in the design
of modern projectors side lobe suppression is an
important consideration. The dotted curves show
the result of lobe suppression. With modern
designs, the maxima of all side lobes are usually
more than 20 db below the maximum of the main
lobe. Graphs like those in figures 1-4 and 1-5 are
drawn for projectors from actual measurements of
sound level in different directions. They are
called directivity patterns. Projectors and directivity are discussed in more detail in chapter 2.
DEVIATION FROM INVERSE SQUARE LAW
The method by which the inverse square law is
modified to represent the intensity or level of a
sound field when the source does not radiate uniformly in all directions, has just been described.
Deviation from the inverse square law when the
sound transmission is in an actual medium such
as the water of the ocean will now be considered.
The ocean, taken as a medium for the transmission
of sound, is far different from the ideal condition
assumed previously. The extent of the ocean is
limited, being bounded by the surface and the
bottom. It is not homogeneous-the upper layers
are usually warmer than the lower ones and near
the mouths of large rivers the salinity is greatly
reduced. Because of both these facts the water
is less dense in the upper layers. The temperature
and salinity may change also in a horizontal
direction. The pressure increases with depth.
These changes in the physical character of the
ocean cause variations in the velocity of sound
waves being transmitted in the ocean.
Other less obvious acoustic properties of the
ocean contribute to making the calculation of
sound intensity difficult. As a sound wave travels
outward from a source in the sea, some of the
energy is converted into heat by friction because
of the viscosity of the water. This process is called
absorption. Another portion of the energy goes
into the production of secondary wavelets which
travel in directions other than that of the primary
wave. This phenomenon is called scattering. A
more general term, embracing both absorption and
scattering, is attenuation.
It is possible to measure the total transmission
loss and to observe how it deviates from the
inverse square law value of the ideal medium. To
measure transmission loss the axial source level,
La, of the transmitting ship is kept constant and
sound level L is measured at the receiving ship.
The difference
H=La-L (1-14)
is the loss in level suffered by the sound in being
transmitted from one ship to the other and is
usually called the transmission loss. Except, for
sign and the effect of attenuation, this transmission
loss is the same quantity as that plotted in figures
1-1 and 1-2.
Such an experiment shows that equation (1-12)
does not accurately represent the actual transmission loss. The difference between the observed
value of H and that calculated from equation (1-12) is thus a measure of the departure of the ocean
from an ideal medium. This departure is often
called the transmission anomaly.
It is sometimes difficult to isolate the effects of
the beam pattern from other factors affecting
transmission loss. Consequently, a more practicable
6
definition of transmission anomaly is the
difference between the observed transmission loss
and the transmission calculated from the inverse
square law alone, without taking into account
the directivity effect. The directivity effect is
thus included in the transmission anomaly defined
by
A=H-20 log r (1-15)
whence the actual sound level can be calculated
from the equation
L=La-A-20 log r. (1-16)
The usefulness of this concept of transmission
anomaly is illustrated by figures 1-6 and 1-7.
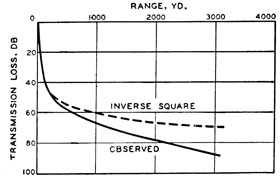
Figure 1-6. -Comparison of transmission loss observed in an
experiment with that calculated from the inverse square law.
These figures are based on experimental data obtained under special conditions.
The solid curve of figure 1-6 is a graph of observed transmission loss H and, for comparison,
the transmission loss calculated from the inverse
square law is plotted as a dotted curve. The difference between these two curves does not seem
very great, and would hardly be noticed if the
dotted curve were omitted; yet the difference is
very important in echo ranging.
Suppose the echo from a certain submarine can
just be detected by a certain sonar equipment
when the transmission loss is 70 db. If the inverse
square law were valid, it could be detected out to
3,000 yards, but under actual transmission conditions it could not be detected beyond 1,250 yards,
unless some other factor happened to be especially
favorable at moderate ranges.
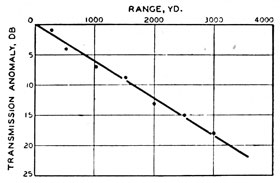
In figure 1-7 the increasing departure of the
transmission loss from the inverse square law, as
Figure 1-7. -The same experimental date as in figure 1-6,
plotted as transmission anomaly.
range increases, is immediately apparent. Furthermore, a simple law is also obvious-the transmission anomaly, A, is proportional to range.
Under favorable conditions, the transmission
anomaly can be represented by the simple equation
A=ar (1-17)
where a is an empirical constant called the attenuation coefficient.
Defined in this way, the transmission anomaly
measures the difference in the transmission loss of
sound from an actual source in the ocean and the
loss of sound transmitted to the same range by a
small source in an ideal medium. Besides the
effect of directivity, other components of the
transmission anomaly are:
1. Sound energy is converted into heat because
of the viscosity of the water. This process is
called absorption.
2. Variation in temperature and salinity cause
changes in density, which, as the hydrostatic pressure increases with depth, result in variation of the
velocity of the sound and consequent refraction of
the sound rays.
3. The scattering of sound by reflection from the
surface, by the bottom, and by particles suspended
in the body of the ocean is a very important factor.
A distinction should be made between specular, or
regular, reflections-as from the surface and from
the bottom-and the diffused reflections from the
particles-ordinarily designated by the term
"scattering."
4. Other factors about which little is known may
contribute to the transmission anomaly.
7
Refraction of Sound
VELOCITY OF SOUND IN SEA WATER
In the foregoing discussion the refraction of
sound in sea water was mentioned as an important
factor in the transmission of sound in the ocean.
In a homogeneous medium sound would travel in
straight lines. As in the analogous case of light,
the path of a sound wave is curved if the velocity
of propagation is not the same at all points. A
plane wave that enters another medium obliquely
undergoes a change in direction, if the velocity of
the wave in the second medium is different from
that in the first. One part of the wave travels
faster than the other and the wavefront is bent
toward the medium of lower velocity. This phenomenon is called refraction. The ordinary laws
of geometrical optics can be applied to the refraction of sound, although they are strictly true only
for sounds of very high frequency, and do not
take into account such phenomena as scattering,
diffraction, reflection, and absorption. Although
these phenomena cannot be ignored, it is simplest
to omit them in initial discussions.
The velocity of sound in a liquid medium may be
computed from the elasticity modulus, E, and
density, ρ, of that medium-
v=square root(E/ρ). (1-18)
If E and p are in the British system of units, the
velocity is in feet per second. As indicated by
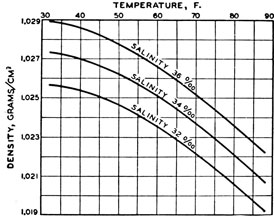
Figure 1-8. -Variation of the density of sea water with temperature and salinity.
equation (1-18) the ratio of elasticity modulus to
density of any transmitting medium determines
the sound velocity in that medium. Any influence
which changes either factor to give a change in the
E/ρ ratio has a corresponding effect on the velocity.
The E/ρ ratio is governed by temperature, pressure,
and salinity and the velocity must be evaluated for
any given set of conditions. An increase in any of
these factors will increase the sound velocity,
although this increase is not directly proportional.
Temperature, for example, ordinarily affects density to a greater degree than it affects the elasticity
modulus. Thus, the higher the temperature of the
medium the lower the density and the higher the
velocity. Of the three factors (temperature, pressure, and salinity) that control the variables, E
and ρ, in equation (1-18), temperature is by far
the most important in sound transmission in
sonar practice.
Note in figure 1-8 that the density changes at
a variable rate with temperature. Thus, at constant salinity, the velocity increases with the
temperature at a variable rate.
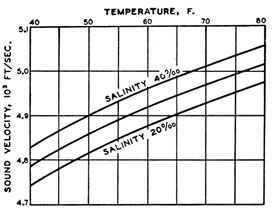
Figure 1-9 shows the variation with temperature
for three salinities. Changes of 20° F, in the upper
layer of the ocean are not uncommon. An increase in salinity of 1 part in 1,000 increases the
velocity of sound 4.27 ft./sec. In most cases,
however, the effect of salinity can be neglected
Figure 1-9. -Variation of the velocity of sound in sea water
with temperature at three values of salinity.
8
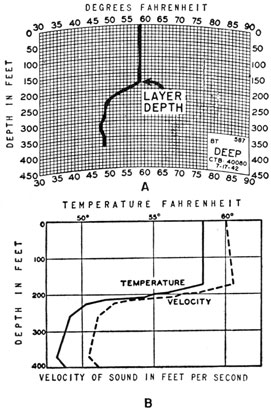
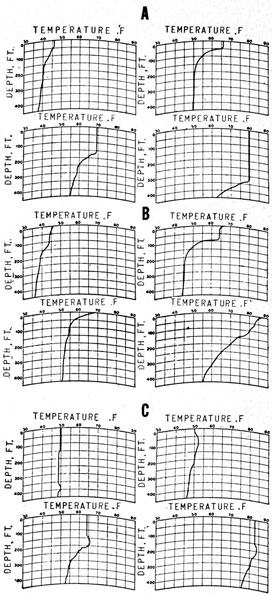
Figure 1-10. -Variation of temperature with depth. A, Typical
slide; B, temperature-depth graph.
because salinity is comparatively constant except
at the mouths of large rivers.
Increase of pressure with depth causes an increase in the speed of sound of 1.82 feet per second
per 100 feet of depth. Figure 1-10, A, shows a
typical bathythermograph slide with grid superimposed. The pressure effect is important only if
both the temperature and the salinity are constant.
This effect is shown in figure 1-10, B, in which the
solid line shows how the temperature varies with
depth in a particular case and the dotted line
indicates the change in the velocity of sound with
depth corresponding to this temperature distribution. The salinity effect is negligible. The
effect of pressure on the velocity of sound in the
isothermal layer of the upper 180 feet is evident
from the velocity graph which shows a slight
increase in the velocity with depth. Elsewhere
the velocity curve parallels the temperature curve
quite closely.
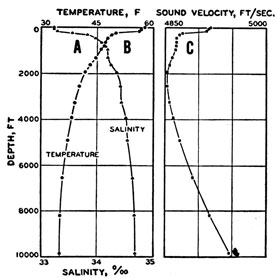
At greater depths, temperature and salinity
change only slightly, and the pressure effect dominates. The average temperature decreases with
depth, as shown in figure 1-11, and down to about
2,500 feet, this decrease is sufficiently great to
neutralize the effect of increasing salinity and
pressure, so that the velocity of sound also decreases. At greater depths, the pressure effect
begins to outweigh the temperature effect, and
the sound velocity is seen to increase with depth.
This minimum velocity at great depths has interesting acoustic consequences.
Horizontal and Vertical Changes
In considering temperature changes in the sea,
it can be assumed that only variations in a vertical
direction are significant. On this thesis the ocean
may be considered as consisting of strata, in any
one of which the same temperature exists over a
large horizontal distance. Compared with vertical
variations of temperature, the horizontal variations
actually observed are very small. Changes in
temperature over a horizontal distance of 100
feet are rarely as much as 0.5° F and usually less
than 0.1° F. Furthermore, they are not systematic
Figure 1-11. -Variation of temperature, salinity, and sound
velocity with depth in the ocean.
9
On the other hand, over a vertical distance
of 100 feet the temperature may vary as much as
10° F, as figure 1-10 shows.
It is now evident that temperature distribution
with depth is the dominant factor in determining
conditions for sound transmission in sea water.
The bathythermograph was developed to determine
this distribution. The bathythermograph is frequently referred to by the abbreviation BT. It
is rugged and convenient in size, and can be lowered
over the side for use while the vessel is underway.
Furthermore, as it is lowered into the sea, the
bathythermograph automatically draws a graph
showing the temperature as a function of depth.
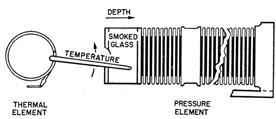
A functional schematic of the bathythermograph
is shown in figure 1-12. As the instrument is
lowered, a stylus is moved by the thermal expansion
Figure 1-12. -Schematic of the bathythermograph.
or contraction of a liquid in the copper
thermometer tube (thermal element). The increasing hydrostatic pressure compresses a bellows,
which drives a smoked glass slide at right angles to
the stylus which is driven by the thermal element.
Thus a permanent graphical record of temperature
against depth is obtained as the instrument is
lowered and raised in the ocean. Figure 1-10, A,
shows a typical slide with a coordinate grid superimposed; figure 1-10, B, is the temperature-depth
graph made from the trace on the slide. Such
temperature-depth graphs are called bathythermograms.
Twelve typical bathythermograms are shown in
figure 1-13. These bathythermograms illustrate
the variable character of the temperature distribution in the surface layers of the ocean. Examination of these charts shows that the temperature-depth curve can be subdivided usually into
segments having different temperature gradients.
Layers in which the temperature is uniform are
called isothermal layers (figure 1-13, A). Negative
Figure 1-13. -Typical bathythermograms corresponding to various gradients. A, Isothermal surface layer; 13, negative
temperature gradient in surface layer; C, positive temperature
gradients.
gradients (figure 1-13, B) describe conditions in
layers in which the temperature decreases with
depth. Positive gradients (figure 1-13, C) describe
conditions in layers in which the temperature
increases with depth.
10
A layer in which the temperature decreases very
rapidly-particularly if it is immediately beneath
an isothermal layer or a layer of smaller gradient-is commonly called a thermocline. The decrease in
temperature which always occurs at great depth
is sometimes called a permanent thermocline.
SNELL'S LAW OF REFRACTION
It has been pointed out how a sound beam is
bent or curved from a straight path if it passes
obliquely from one layer of sea water to a second
layer where the velocity is different from that in
the first layer. With a method of determining the
velocity of sound at each point in the sea, it is
theoretically possible to calculate the sound rays,
or paths, along which the sound travels. If, for
simplicity, the ocean is assumed to be stratified so
that the temperature at all points having the same
depth is the same, the calculation becomes quite
simple.
No attempt is made here to give a detailed
explanation of the computational methods. The
computation is based on the familiar Snell's law
of refraction that is discussed in all textbooks of
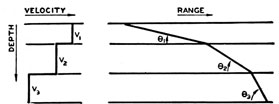
physics as it applies to light rays. Figure 1-14
shows an especially simple case of three layers, or
strata, in each of which the sound velocity is
constant.
If a plane wave is considered to be passing
through these three layers, Snell's law is
v1/cos(θ1) = v2/cos(θ2) = v3/cos(θ3) (1-19)
Figure 1-14. -Diagram illustrating Snell's law
where v1 and θ1 are the velocity and inclination of
the ray in the first layer, and so on. Note that the
angle of inclination, θ, is the complement of the
angle usually given with Snell's law. The ray in
each layer is a segment of a straight line; but if the
layers are allowed to become very thin, the ray
approaches a smooth curve. At each point along
the ray, however, the relation between the inclination of the ray and the velocity of sound is
still given by equation (1-19).
TYPICAL RAY DIAGRAMS
Because most velocity distributions can be approximated for series of layers from bathythermograms, an approximate ray construction can be
carried out with the aid of Snell's law as indicated.
Such a ray diagram represents the sound field
produced by sound energy transmitted from a
sonar projector. If an underwater target is
located within the bounds of the ray diagram a
return echo may be received at the sonar vessel.
Marked Downward Refraction
A ray diagram for typical conditions of sharp
downward refraction is shown in figure 1-15. It
should always be borne in mind that the curvature
of the rays is greatly exaggerated because of the
necessary contraction of the horizontal scale. In
figure 1-15 the ratio of horizontal to vertical scale
is 75 to 1.
Figure 1-15. -Ray diagram with sharp downward refraction.
11
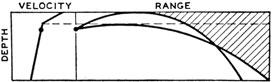
Figure 1-16. -Diagram of part of figure 1-15 drawn with undistorted scale.
Figure 1-16 shows a portion of the same diagram
drawn on an undistorted scale.
The contracted horizontal scale also exaggerates
the inclination of the rays with the horizontal.
This inclination is shown in figure 1-17, the
numbers being the true angles in degrees and the
lines showing the angles as plotted on the diagram.
The part of the beam above the axis is considered
to have positive inclination; the part below the
axis, negative inclination. In a directional transducer, nearly all of the energy is concentrated in a
cone of about 10° opening. Hence a judicious
selection of rays with initial inclinations of 5° or 6°
on either side of the axis provides a sufficiently
complete picture of the paths followed by the
sound rays.
The velocity-depth graph of figure 1-15 shows
three layers in which the velocity gradient is constant. The projector is at a depth of 16 feet.
The following three rays are drawn:
1. The ray that leaves the projector at -6°,
and which may be considered as the lower boundary of the main lobe of the projected beam of
sound. The dimensions of the diagram do not
permit the inclusion of the +6° (upper bounding)
ray.
2. The ray that leaves the projector horizontally-the axial or 0° ray. This ray is shown
bent sharply downward.
3. The ray that leaves the projector at +1.4°.
This angle was chosen because this ray is tangent
to the surface.
These three rays are also shown on figure 1-16
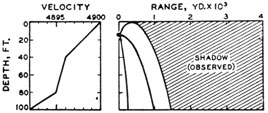
with an undistorted horizontal scale. The most
striking feature of this ray diagram is that all
the sound is confined to a very limited region and
beyond about 500 yards from the projector the
surface casts a shadow. The explanation of this
shadow follows.
The outer rays of the upper half of the sound
beam fall on the surface and are reflected there.
A ray of a certain critical inclination is refracted
downward so that its inclination when it reaches
the surface is zero. Any rays with inclinations
greater than this critical value are reflected back
by the surface inside the region bounded by the
ray tangent to the surface.
A ray with less initial inclination does not reach
the surface but curves down inside the critical
ray; the 0° ray illustrates this point. The critical
ray in the present example is the 1.4° ray. It
bounds the direct sound field and for this reason
is called the limiting ray.
Except for sound scattered or diffracted from
the direct sound field, the shadow should be a
region of silence. This picture is approximately
a true one; observations made under conditions
of strong downward refraction show a sharp drop
of from 30 to 40 db in the sound level near the
range indicated by the limiting ray.
Figure 1-17. -Diagram showing how the inclination of the rays
is distorted in the conventional ray diagram.
12
Isothermal Layer and Thermocline
Another common type of thermal distribution
is shown in figure 1-10. This figure shows an
isothermal layer at the surface, below which a
sharp negative gradient occurs. In the isothermal
layer, the velocity gradient is positive because of
the pressure effect, as shown in figure 1-10, B.
About 90 percent of the bathythermograph
records taken all over the world show this type of
thermal structure. The sound-velocity graph and
ray diagram corresponding to this example are
shown in figure 1-18.
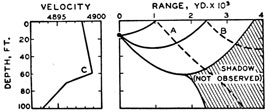
Figure 1-18. -Ray diagram for an isothermal surface layer.
Theory predicts a shadow, limited by the ray
which is horizontal at the level of maximum
velocity. The rays above the limiting rays are
refracted upward and are ultimately reflected at
the surface. Those below the limiting ray enter
the thermocline and are there refracted downward. The sound beam is split along the limiting
ray into an upper and a lower section; hence the
term "split-beam pattern" is commonly applied
to this type of ray diagram.
The shadow beyond the limiting ray might be
expected to be a region of relative silence, as in
the previous case. Actually the shadow in figure
1-18 differs from that in figure 1-16 in that it is
penetrated by surface-reflected rays such as those
designated by A and B. Because the surface
reflects approximately all the incident sound
energy, it is obvious that the shadow in figure 1-18
is not so complete as the one in figure 1-15. In
the second velocity graph, the corner at the point
of maximum velocity, C, is actually round instead
of being sharp as shown. When this rounding is
properly introduced to the diagram the "shadow"
is found to be a region into which few rays, rather
than none at all, penetrate.
Experiments show that there is no noticeable
shadow under these conditions. The intensity at
229276°-53-2
a given depth decreases gradually with increasing
range and shows no abrupt drop as the limiting
ray is crossed. The intensity gradient is much
greater below the "splitting" point than above.
Other thermal structures result in the sound
field conditions illustrated by the ray diagrams in
figures 1-19 and 1-20.
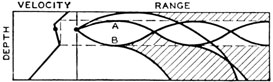
Figure 1-19. -Sound field bounded by two limiting rays.
Figure 1-19 illustrates the case in which two
limiting rays bound the field.
Figure 1-20 shows a velocity distribution resulting in what is called a sound channel. All rays
leaving the projector between rays A and B are
alternately refracted up and down. The rays are
thus confined to a certain layer, to which the term
"sound channel" is applied. Transmission losses
in sound channels are exceptionally low, and
extremely long ranges are possible.
In the open sea, sound channels are rare and
transitory in the upper layers, because the thermal
conditions causing them are unstable. Near the
mouths of large rivers, where salinity conditions
cause changes in sound velocity, it is possible to
have stable sound channels in the surface layers.
Figure 1-20 -Formation of a sound channel.
At great depths, where the temperature is
practically constant, the pressure effect causes the
sound velocity to increase with depth and there is
a permanent sound channel. The extremely long
ranges that are possible with low-frequency sound
signals in this permanent sound channel are
utilized in a long-range position-fixing system that
uses signals from explosions set off at the depth
of the sound channel. A full description of this
system is given in chapter 16.
13
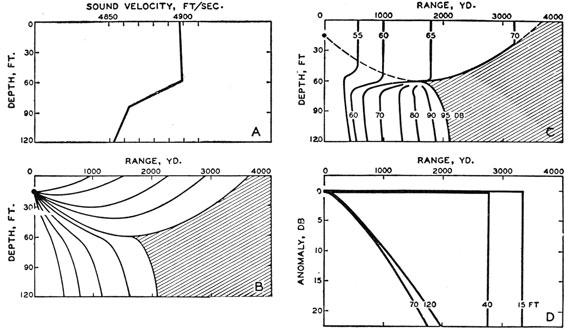
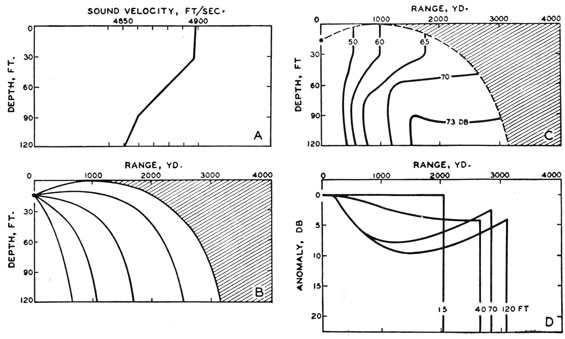
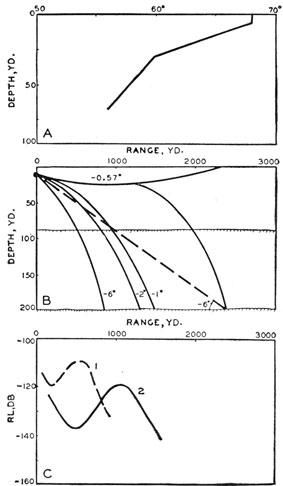
Figure 1-21 -Calculation of theoretical intensities for typical ray diagram. A, Bathythermogram; B, ray diagram; C, intensity
contours; D, anomaly graph for several depths.
Ray Divergence
The effects of refraction have been presented in
black-and-white pictures of silent shadows and
regions of direct or reflected sound. This concept
comes from the earliest form of theory on which
echo-range predictions were based. However, it
has since been found that the shadows are not
silent and that there are marked variations within
the field of direct sound.
Even before this experimental knowledge was
obtained, attempts had been made to enlarge the
ray theory to enable the calculation of intensity
changes in the direct field. This intermediate
theory is still useful for some purposes even though
it also predicts completely silent shadows that
are not observed.
The results of these theoretical calculations can
be presented graphically in several ways, as illustrated in figure 1-21. Figure 1-21, A, is a typical
bathythermogram showing an isothermal layer
and thermocline. The corresponding ray diagram
is shown in figure 1-21, B. Figure 1-21, C, shows
a series of contours on which the sound level is
constant. These contours are identified by the
values of transmission loss in db. Above the
thermocline they represent the loss calculated
from the inverse square law. In general, above
the thermocline, these contours are farther from
the projector than they are below the thermocline,
and they are more widely spaced above than
below. Throughout the whole shadow (shaded
area) the calculated intensity is zero, and the
transmission loss is consequently infinite.
Another method of presenting the results is
shown by figure 1-21, D. The transmission
anomaly was calculated for various points. If
the depth is held constant-for example at 70
feet-and its distance from the source is allowed
to vary, the series of values obtained can be plotted
as a curve. See the curve marked "70 feet" in
figure 1-21, D. These graphs are smooth curves
when the depth is greater than that of the thermocline. When the point is above the thermocline,
the transmission anomaly is practically zero until
the point reaches the shadow zone where it suddenly becomes infinite. The discontinuous change
in the transmission anomaly is due partly to the
approximate velocity-depth curve used in the
14
calculation. If these approximations were eliminated from the calculation, the change at the
shadow would not be so abrupt.
The very marked increase in the transmission
anomaly in the thermocline has important operational implications. From figure 1-21, C, it
appears that if, for example, at a range of 1,000
yards a hydrophone is lowered to a depth of from
80 to 90 feet, it enters a region where the sound
transmission is poorer by nearly 10 db than it is
at from 20 to 30 feet higher. The sudden increase
of the transmission anomaly is called the layer
effect. The importance of the layer effect is
enhanced by the prevalence of this type of thermal
pattern in the ocean all over the world.
Figure 1-22 shows corresponding diagrams for a
case of downward refraction.
INADEQUACY OF THE RAY THEORY
There has been much speculation about the
reasons for the differences between the ray diagram
theory and experiment-that is, the absence of
sharp silence shadows and the presence of marked
variations of intensity within the field of direct
sound.
The failure to observe the sharply bounded silent
shadow predicted by the ray-diagram theory
should not be surprising. It is well known that
even in the case of light, shadow boundaries are
not sharp. The encroachment of a wave motion
into the geometric shadow of an obstacle is known
as diffraction.
Calculations of theoretical intensities have been
made of sound fields for various sound waves
around corners in air. As explained in textbooks
on physics these diffraction effects increase with
the wavelength of the wave disturbance, so that
the ray theory becomes less and less correct as the
wavelength increases. The wavelength of 24-kc
sound in sea water is several inches and much
longer than the wavelength of light, so that considerable diffraction of sound may be expected.
Calculations have been made which show that the
predicted effect due to diffraction is large enough
to explain some of the irregularities in the transmission anomaly. However, the quantitative
agreement between these diffraction calculations
and measurements are not exact.
Figure 1-22. - Calculation of theoretical intensities for downward refraction.
15
Another possible explanation of the sound
energy observed in the shadow is the scattering
by small obstacles and particles suspended in the
sea. The scattering of light by particles such as
dust, snow flakes, and rain drops in the atmosphere
is a familiar phenomenon and is known to be
responsible for the many changes in the color of
the sky and in the visibility of objects: The scattering of sound corresponding to this phenomenon
occurs in the sea. For particles that are small
compared with the wavelength, the relative
amount of energy scattered depends surprisingly
upon the wavelength.
This dependence is expressed quantitatively in
Rayleigh's law of scattering: The relative amount
of sound energy scattered by small particles in a
medium is inversely proportional to the fourth
power of the wavelength; or, qualitatively, the
shorter the wavelength, the greater is the scattering. For example, the wavelength of 5-kc
sound is 10 times that of 50-kc sound-that is,
a small particle scatters 10,000 times more sound
of 50-kc frequency than of 5-kc frequency. It is
probable that scattering is the explanation for
some of the variations in the ray theory.
Reflection and Scattering
The mechanism of scattering, with its resulting
reverberation, and the mechanism of echo formation from underwater targets are very similar.
They can be discussed conveniently at the same
time.
When a short-tone pulse is sounded in a large,
empty room, the sound echoes and re-echoes from
the walls, ceiling, and floor for a considerable time.
This phenomenon is called reverberation. It has
been studied extensively by acoustic engineers,
because it interferes with the understanding of
speech and the enjoyment of music. A suitable
wall covering deadens sound and eliminates
reverberation.
When an echo-ranging pulse of sound is emitted
into the ocean a phenomenon called reverberation
is observed. Although the ocean has a floor and
a ceiling, it lacks the four walls of a room, and
neither the laws nor the causes of underwater
reverberation should be confused with those of
reverberation in acoustic engineering.
Theoretically, if the surface and bottom of the
sea were mirror-flat and if there were no suspended
matter (including fish) in the water, there would be
no reverberation. Every departure from these ideal
conditions results in an echo, usually a very weak
echo. There are many irregularities on the ocean
bottom, each wavelet on the surface and each
suspended particle in the water probably contribute their individual echoes. The combined
result is a scattering of sound in all directions.
Some of this scattered sound comes back to the
transducer and is heard in the sonar loudspeaker.
This reverberation has very important connections
with echo ranging.
Reverberation is therefore to be considered as
the resultant of a large number of very weak
echoes. Some of the targets producing these
echoes are not very obvious, nor is much known
concerning them. They may be air bubbles, suspended solid matter, organic matter such as
plankton and the fish feeding on plankton, or
minute inhomogeneities in the thermal structure.
Minor irregularities of the ocean bed are very
effective scatterers, and reverberation is very high
when the sound beam strikes the bottom. The
surface waves undoubtedly contribute appreciably
to it.
Reverberation is easily distinguished from extraneous noise because reverberation is a tone of
fairly definite pitch, whereas noise has a wide band
of frequencies. The individual echoes mentioned
as forming reverberations are not perceptible as
such; they overlap one another in time, causing
marked fluctuations in the intensity. If the
signal is of constant frequency, transmitted horizontally, it is succeeded by a quavering, ringing
tone of rapidly decreasing loudness, interspersed
with occasional bursts of sound that might be
mistaken for echoes by an inexperienced observer.
In shallow water a crescendo, effect may be perceived after a certain interval because of sound
that is scattered backward by the bottom.
If relatively long pings (transmissions of sound
with a duration of about 200 milliseconds) of constant frequency are used, reverberation has a
16
musical sound. With shorter pings the musical
character disappears; although the pitch can still
be distinguished, the tone becomes rough and
grating.
When a frequency-modulated signal is used, the
reverberation loses its musical character. Some
frequency modulation may occur because of improper functioning of the sonar oscillator. If the
reverberation from long pings of supposedly constant frequency is not musical, the oscillator should
be examined for frequency instability.
ECHO FORMATION
When a sound wave passes over an obstacle
suspended in a medium, the medium is set into
vibration and becomes a secondary source of
sound. The amplitude of the vibration is proportional to the amplitude of the primary sound, and
consequently the intensity of the secondary sound
is also proportional to the intensity of the primary
sound.
The simplest example is that of an object like a
submarine or a large fish, with dimensions that are
large compared to the wavelength of the sound.
Such an object intercepts a certain amount of
sound and casts an acoustic shadow. The intercepted power is reradiated as the secondary sound,
or, as it is more usually called, the echo.
The amount of power intercepted is determined
by the target area of the obstacle. For the present,
the target area may be defined in a simplified
manner by imagining a shadow cast by the obstacle
to fall on a plane perpendicular to the sound rays.
The shaded area is the target area, σ. In a sphere
with a diameter, d, for example, it follows that the
target area would be a circle of area
σ=¼πd2. (1-20)
In irregular objects, the target area depends on
the direction from which the sound is incident.
If F is the energy flow (in watts per unit area)
at the obstacle and W is the total power intercepted,
W=Fσ. (1-21)
If the target is perfectly reflecting, all this energy
is reradiated as sound. If the target is not
perfectly reflecting, only a fraction, α, of this
energy is reradiated as sound. Thus, the secondary sound power is
Ws=Fασ. (1-22)
The effect of absorption is thus the same as if the
target area were reduced. This secondary sound
is radiated in all directions, though not necessarily
equally in all directions.
A sphere reradiates the sound equally in all
directions and is thus the simplest example to treat.
It may seem that the existence of a shadow is in
contradiction to this statement; however, at great
distances from the sphere, diffraction causes the
shadow to disappear. Consequently, the statement is strictly correct only at a considerable distance from the spherical target.
At a great distance, r, the power, Ws, that is
reradiated from the target flows through the whole
area, 4πr2, of an imaginary spherical surface centered at the target. Hence, the energy flow of the
secondary sound is
Fs=Fασ / 4πr2. (1-23)
If the target is not spherical, it radiates more
sound in some directions and less in others than is
predicted by equation (1-23). But this equation
nevertheless still is valid on the average. The target area already depends on the direction of the
incident sound, and may also be considered to
depend on the direction in which the sound is
scattered and on the reflecting properties of the
target. If target area is adjusted to account for
these factors, an effective target area, σ', may be
used in expressing the secondary energy in the
field surrounding the target
Fs=Fσ' / 4πr2. (1-24)
INTENSITY OF SCATTERED SOUND
Because the energy flow, F, is defined as the
intensity, I, equation (1-24) may be written also as
Is=(Iσ')/(4πr2). (1-25)
Note that, in this equation, r is the distance
from the target to the point at which the scattered
intensity is being calculated. Is represents the
secondary intensity. The primary intensity itself,
17
I, depends on r', the distance from source to target,
and in general r' does not equal r. Neglecting
refraction, which has been implicit in all of the
previous equations, the following equation is
applicable:
I=I1 / (r')2.
Therefore,
Is=I1σ' / (4πr2(r')2. (1-26)
If the echo is received at the source of the sound
as in practical echo ranging, r=r' and hence
Is=I1σ' / 4πr2r4.
The phenomenon of scattering or reverberation
differs from echo formation only in that it results
from the action of many relatively small targets
rather than from one large target. The action of
a single scatterer can still be described by equation
(1-27).
The simplified definition of a target area fails
completely when the scatterer has dimensions that
are less than the wavelength of the sound. The
target area, or the effective cross section, of small
solid or liquid particles is much less than their
actual section in a ratio that is roughly (πd/λ)4 where
d is the diameter of the particle and λ is the wavelength of the sound.
There are occasions when air or vapor bubbles
might be expected to exert an appreciable influence
on the transmission of sound. It is difficult to
understand how bubbles can exist permanently in
the sea, because sea water is not saturated with air
except very near the surface. There are several
obvious sources of intermittent bubble formation:
(1) Whitecaps; (2) the breaking of the bow wave,
which causes bubbles to be washed under a ship
and into its wake; and (3) the rotation of the propellers of ships or even submerged submarines.
An air bubble is much more compressible than
the surrounding water. Under the influence of a
sound wave, it therefore pulsates with a relatively
large amplitude. If the pulsation is to be followed,
the water immediately surrounding the bubble
must oscillate with an amplitude considerably
greater than that of the water at a distance. The
mass of this surrounding water, coupled with the
compressibility of the air, results in resonance at a
frequency, FR, which depends on the diameter of
the bubble, d, and on the average pressure, p, of
the gas in the bubble. The dependence on p arises
because the compressibility of a gas depends on its
pressure.
The sharpness of the resonance peak of the bubble is determined by a parameter, Q, analogous to
that of electric circuits. The value of this parameter cannot be calculated readily but is certainly less than
λR/d, where λR is the wavelength corresponding to FR.
It is difficult to calculate the exact value of the
effective cross section of an air bubble compressed
in water. However, when excited by sound frequencies near resonance, the effective cross section
or target area becomes very large and may approach λR. For example, at a depth of 66 feet
where a bubble 0.02 inch in diameter has a resonant
frequency of 20 kc, the target area may be several
square inches.
For frequencies more than 1 octave below resonance, the target area is considerably less than the
actual cross section and approximate calculations
show that gas bubbles scatter low-frequency sound
considerably more effectively than do solid particle s of the same size.
The mathematical investigations on which the
preceding discussion of air bubbles is based have
been confined to spheres. Their extension to non-spherical objects is not simple, but has been carried out for some objects. It is clear that the same
general laws govern the more general shapes. For
example, a fish that is not too flat or elongated
casts a shadow roughly equal in area to that of a
sphere of the same volume.
Our ignorance of the reflection coefficient causes
some uncertainty in these calculations. The reflection coefficient depends largely on the compressibility of the fish. If the fish has a swim bladder
(air cavity), it probably is the most effective portion in reflecting sound. Similar principles apply
to kelp and other forms of marine life. These
plants have gas-filled floats and are therefore very
good reflectors of sound.
The bottom is especially important in the production of reverberations. Such objects as boulders, pebbles, shells, and coral are all potential
scatterers of sound. A smooth sand or mud bottom theoretically behaves more or less like a mirror
and scatters little sound back to the source.
18
The waves on the sea surface also act like separate targets. The large surfaces reflect ultrasonic
waves somewhat like curved mirrors. The effect
of the smaller ripples is not clearly understood, but
such ripples probably scatter the sound about
equally in all directions.
THEORY OF REVERBERATION
None of the small scatterers just discussed returns an appreciable echo by itself. The simultaneous reception of the echoes from a large number of the scatterers constitutes what we call
reverberation.
To understand the manner in which the scatterers cooperate in producing reverberation, consideration must be given to the manner in which a
pulse of sound (a "ping") is propagated. If the
duration of the pulse is to seconds, it consists of a
train of waves the total length of which is vto,
where v is the velocity of sound. This distance is
called the train length of the pulse. Because v is
1,600 yd/sec, approximately, a pulse of duration
0.1 second (100 msec) results in a wave train 160
yards long. If the frequency is 24 kc, there are
24,000 X 0.1 = 2,400 complete waves in the train.
One-half the train length is called the ping
length; a pulse lasting 0.1 second thus has a ping
length of 80 yards. The ping length is a more
useful concept than the train length, for two
reasons.
In the first place, in echo ranging, the time required for the pulse to travel from projector to
target and back to the receiver is measured. The
clock is the range dial and is calibrated in terms
of the range of the target that returned the echo- not in terms of time. If a target is at range r, the travel time is 2r/v. Therefore, if the echo is a
pulse of duration to, the range indication increases
by the amount ro=-vto/2 during the reception of the
echo. This amount equals exactly the ping length
as just defined.
In the second place, if there are many targets
or scatterers, the echoes that are heard simultaneously come from those scatterers for which distance s from the sonar differ by less than ro. At a
given instant, therefore, echoes are received from
all scatterers that lie in a spherical shell, with a
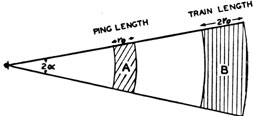
thickness ro, as shown in figure 1-23. At this
Figure 1-23 -Instantaneous relation between the region (A)
from which echoes are being heard and the volume (B)
occupied by the wave train for a beam whose angular half
width is α radians.
instant, the actual train of waves no longer passes
over this particular lot of scatterers; it has moved
onward during the time the echoes were returning
to the sonar. The instantaneous relation between
volume A (from which the echoes are being heard),
and volume B (which is occupied by the wave
train), is shown in figure 1-23.
Figure 1-23 also shows graphically how the ping
length and train length are related. Very little
further reference is made to the train length, as almost no interest centers on region B. On the
contrary, frequent reference to region A and the
ping length is necessary.
The effect of scatterers suspended in the volume of the sea can now be calculated. Consider
the simplest possible case:
1. There are N scatterers per unit volume.
2. Each scatterer has the effective target area σ'.
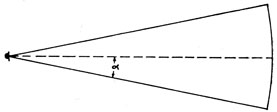
3. The sonar has a sharply defined beam of half
width α. Its directivity pattern is shown in
figure 1-24. The dotted line represents the
axis of the beam.
Figure 1-24 -Ideal beam pattern of half width α.
4. The sonar is in such a location that all effects
of surface and bottom can be ignored.
The intensity of the echo from a single scatterer
is given by equation (1-27), provided it is in the
beam; otherwise, it is zero. There are many scatterers in the active shell (region A, figure 1-23) at
19
any instant. If V is the volume of this region, the
number of scatterers whose echoes are being received is NV. If this number is combined with
equation (1-27), the intensity of the reverberation
is
Ir=I1NVσ' / 4πr4 (1-28)
Now the volume V is easily calculated. It is
given approximately by
V=2πr2ro(1-cos α), (1-29)
where r is the range to the center of region A.
Hence,
IR=I1 ((Nσ'ro)(1-cos α)) / 2r2. (1-30)
Several conclusions can be drawn from equation
(1-30). A brief list of the simpler conclusions
follows:
1. Because the reverberation intensity, IR, is
proportional to the source intensity, I1 increased
sound output increases the reverberation.
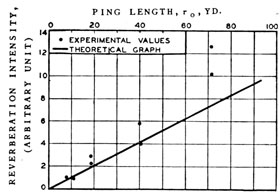
Figure 1-25 -Relation between ping length and reverberation
intensity.
2. Because the reverberation intensity is proportional to the ping length, ro, a long ping causes
more reverberation than a short one. (See
figure 1-25.) If the reverberation intensity were
strictly proportional to the ping length, the dots
would lie on the solid graph.
3. Because (1-cos α) increases as a increases,
a broad beam causes more reverberation than a
narrow one. In general, doubling the width of the
beam causes IR to increase about fourfold.
4. The (volume) reverberation intensity varies
inversely as the square of the range, r; this
relation should be compared with equation (1-27),
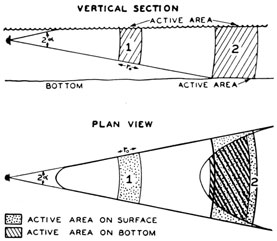
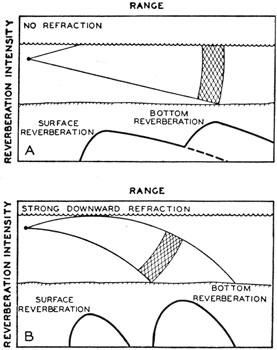
Figure 1-26 -Active areas on surface and bottom for two
different positions of the wave train.
which shows that the echo from a single target
varies inversely as the fourth power of r. The
reason for the difference is the increase in the
active volume, V (region A, figure 1-23), as r
increases.
The theory of volume reverberation, as presented in the previous paragraph, requires only
slight modification when the scatterers are located
on either the surface or the bottom. These two
cases are, in many ways, identical. Instead of an
active volume, V, an active area, A, must be
dealt with, namely, the area of the intersection
of the surface (or bottom) with region A of figure
1-23, already discussed. In figure 1-26, which is
similar to figure 1-23, two successive locations of
active volume are shown. Until the beam intersects the bottom, there is no active area on the
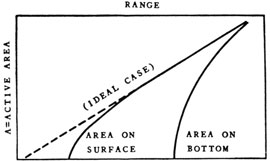
Figure 1-27 -Variation of active areas on surface and bottom
as a function of range, when the projector is very close to the
surface.
20
bottom; at position 1, there is an active area on
the surface, but none on the bottom. After some
time, position 2 is reached and there is an active
area on the bottom as well as on the surface.
Figure 1-26 is drawn for a sonar mounted on a
surface vessel; if the sonar were on a submarine
near the bottom, the situation would be reversed.
Note that at very short range there is no active
area on either bottom or surface; this condition
is shown in greater detail in figure 1-27.
The mathematical expression for the active
areas is rather complicated, except in the special
case in which the projector is very close to the
surface. In such a case
A=2αror, (1-31)
where α is to be expressed in radians. The graph
of this equation is shown as a dotted line in figure
1-27. The departures at short ranges are obvious.
For simplicity it will be assumed that there are
N' scatterers per unit of active area and that each
scatterer has the target area σ'. The intensity of
reverberation is (compare with equation 1-28)
IR=(I1N'Aσ') / (4πr4). (1-32)
If the range r is great enough so that equation
(1-31) can be used for A,
IR=(I1N'σ'roα) / (2πr3). (1-33)
Conclusions (1) and (2) drawn from equation
(1-30) apply to equation (1-33) also. Conclusion
(3) requires only slight modification, because
(1-cos α) is replaced by α. Consequently,
doubling the width of the beam increases surface
reverberation by a factor of only two rather than
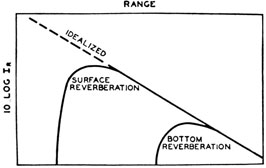
Figure 1-28 -Dependence of surface and bottom reverberation
on range.
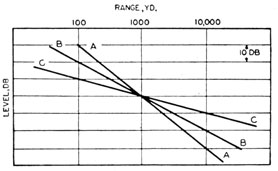
Figure 1-29 -Comparative levels of (A) echo from a single
target, (B) surface (or bottom) reverberation, and (C) volume
reverberation.
four. Finally, surface reverberation varies inversely as the third power of the range, while
volume reverberation varies as the inverse second
power of the range.
If the range is not great enough so that equation
(1-31) can be used, somewhat more elaborate
calculations are needed. The first three conclusions concerning volume reverberation apply
without appreciable change, however, and only
the dependence on range is changed. The graphs
of figure 1-28 show this dependence on range for
surface and bottom reverberations. In this figure
it has been assumed that N', the number of scatterers per unit of active area, has the same value
for both surface and bottom. Actually N' has a
much greater value for the bottom than for the
surface. This condition results in shifting the
graph of bottom reverberation upward relative to
the surface graph.
Figure 1-29 shows comparative levels of (1) an
echo from a single target, (2) volume reverberation, and (3) surface (or bottom) reverberation, as
calculated from equations (1-27, 1-30, and 1-33)
respectively. To give a standard of comparison,
it is assumed that all three factors have the same
level at 1,000 yards, although this assumption is
not necessarily the case in practice. Note that,
at ranges of less than 1,000 yards, the levels
increase in the following order: (1) Volume reverberation, (2) surface (or bottom) reverberation,
and (3) echo. At longer ranges they decrease in
this same order. The graphs diverge 10 db from
their neighbors for each tenfold increase or decrease
in range.
21
Figure 1-30 -Oscillograms of reverberation and echo.
Note that figure 1-29 does not show the dependence of surface and bottom reverberation
upon range; to show this dependence it should be
modified in accordance with figure 1-28.
REVERBERATION IN NONIDEAL CONDITIONS
All of the preceding calculations have been
based on a number of simplifying assumptions
that are not correct under actual conditions but are
useful in presenting the basic ideas. The complications introduced by departures from the ideal
cases just examined will now be considered.
The first simplification was that the scatterers
all have the same target area, σ', and that there
are N of them in each unit volume (or N' on each
unit area). Obviously, the scatterers are not all
the same, but because only the combination Nσ'
enters the final equation, this assumption does not
cause any particular trouble. It is seen the m=Nσ' is the total target area of all the scatterers in
a unit volume. This quantity is called the volume-scattering coefficient. Because N is measured in
yd-3 and σ' in yd2, m is measured in yd-1; that is,
1/m is a length. It is essentially the distance a
wave train can travel before much of its energy
is scattered.
In the same way, n=N'σ' is the total target
area of all the scatterers located on a unit area;
it is called the surface- or bottom-scatteringcoefficient. Because N' is measured in yd-2 and σ' in
yd2, n is dimensionless; that is, it has the same
numerical value whether yards or feet are used
as units.
The second simplification is the assumption that
the projector emits the sound in a sharply defined
beam, with no side lobes. When actual projectors
are involved, the factor (1-cos α) in equation
(1-29) and the factor α in equation (1-31) must
be replaced by others, the exact values of which
depend on the beam patterns of the projector.
If these factors are called Kv and Ks, respectively;
equation (1-30) and (1-33) then become respectively
The two factors, Kv and Ks, like the ones they
replace, bear a simple relation to the half-width
of the main lobe of the transducer. Let a be redefined as the angle (in degrees) at which the
beam pattern has a value 6 db below the maximum
(or axial) level. Then the values of Ks and Kv
are given approximately by the equations,
Ks=4.2 X 10-3α (1-36)
and
Kv=4πKs2=5.5 X 10-5α2. (1-37)
Note that the scattering coefficients are independent of the projector, whereas Ks, and Kv are
independent of the ocean.
Finally, it has been assumed implicitly that the
sound rays are straight lines and that the inverse
square law determines the whole transmission loss.
In actual cases the departures from ideal laws introduce marked effects, which can be ascribed to
departures from the inverse square law of transmission loss.
In order to deal with these complications in as
simple a manner as possible it is convenient to define the reverberation level, RL, by
RL=10 log(IR/I1) db. (1-38)
Note that RL is independent of the sound output of the sonar.
The volume- and surface-reverberation indices, Jv
and Js, are defined by
Jv=10 log Kv (1-39)
and
Js=10 log Ks (1-40)
respectively and, with these substitutions, equations (1-34) and (1-35) become respectively
RLv=Jv+10 log(mro/2)-20 log r (volume) (1-41)
and
RLs=Js+10 log(nro/2π)-20 log r (surface) (1-42)
Equations (1-41) and (1-42) are correct only if
the transmission of sound is accurately given by
the inverse square law. It can be shown that the
departures from the inverse square law are in
most cases properly taken into account in the
following equations:
RLv=Jv+10 log(mro/2)-2Hv+20 log r (1-43)
and
RLs=Js+10 log(nro/2π)-2Hs+20 log r (surface) (1-44)
where Hv and Hs are the actual transmission losses
22
Figure 1-30. -Oscillograms of reverberation and echo.
from the sonar to the active regions responsible
for the reverberation. It is easily seen that if
Hv=Hs=20 log r, equations (1-43) and (1-44)
reduce to equations (1-41) and (1-42).
The form of equations (1-41) and (1-42) suggests that the reverberation decreases steadily
with time from an initial high level. This is not
true. The ringing sound mentioned earlier in the
discussion indicates that rapid changes in the intensity occur, that are not predicted by these
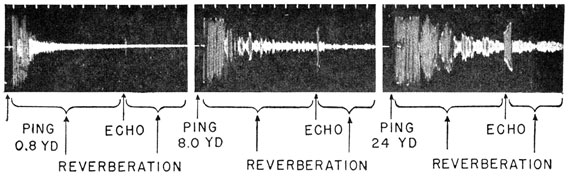
equations. The oscillograms of recorded reverberation show these changes, as in figure 1-30.
These oscillograms are typical of the experimental data in this field and will be discussed in
some detail. The three oscillograms were taken
in rapid succession with different ping lengths of
0.8 yard, 8.0 yards, and 24 yards. Range marks
are spaced 40 yards apart at the upper edge.
The electric input to the transducer was coupled
to the oscillograph and is recorded at the extreme
left. This recording of the electric input is followed by a blank interval of about 0.025 second,
during which the connections were changed from
send to receive. The portions of the trace to the
right of this interval are reverberation, except for
the echo, which is clearly visible in each. The
early reverberation is so intense that it is off
scale in the two right-hand examples. The ordinates of the three oscillograms are comparable,
except that the electric circuit for recording the
outgoing ping did not respond fully to the very
short 0.8-yard ping. The receiving circuits, however, responded fully to its echo. This echo is
rather weak, but the other two echoes have the
same amplitude.
The theory presented above asserts that the
intensity of the reverberation should be proportional to the ping length, ro. Consequently, the
amplitudes of reverberation should be proportional to ro½ so that the three oscillograms should
show amplitude of approximately 1:3.2:5.5. It
is obviously difficult to verify this by a single
measurement, because of the rapid and irregular
fluctuations in the amplitude of the reverberation.
On the average, these ratios are quite close.
A more detailed study of the problem shows that
the theory described here refers only to such
average values, and that there is a good explanation of the rapid changes in amplitude. Two
possible causes immediately suggest themselves:
1. The number of scatterers in the active region
varies as the active region moves outward.
2. The echoes from the different scatterers
interfere.
The first of these possible causes is easily seen
to bring about some fluctuation, but it is often
relatively unimportant as compared to the second.
If there are many small scatterers, only the second
cause need be considered. As the number of
scatterers in the active region decreases, the relative importance of the first cause increases.
Thus the second cause would dominate in long
pings (large active regions) and the first cause
would dominate in exceedingly short pings (small
active regions). An inspection suggests, however,
that even for the 0.8-yard oscillogram, the second
cause of fluctuation is important, although some
of the long "spines" may be caused by single
scatterers.
23
REVERBERATION WITH A HORIZONTALLY
DIRECTED BEAM
In the usual echo-ranging condition, the transducer is directed horizontally in deep water, and
both surface and volume reverberation are generally observed. The intensity of the resulting
reverberation at each range therefore depends on
which of these two types of reverberation is
dominant. Thus, as shown by the following
explanation, volume reverberation always dominates at long ranges, whereas surface reverberation usually dominates at short ranges.
It is convenient to begin the discussion with
average reverberation-range curves obtained under
practical echo-ranging conditions. Surface and
volume reverberation then are considered separately in more detail; finally, average values of
the scattering coefficients are given.
Two reverberation curves are shown in figure
1-31; they are averages of observed reverberations
Figure 1-31 -Effect of wind speed on average reverberation
level.
Figure 1-32 -Comparison of reverberation at wind speed of
17 miles per hour with horizontal and vertical beam.
at high and low wind speeds. The measurements
were made at 24 kc, using echo-ranging equipment
with the transducer mounted at a depth of 16 feet
and a standard ping length of 80 yards.
The two curves exhibit the following features:
1. At short ranges (less than 500 yards) the average reverberation level depends strongly on
the roughness of the sea surface as measured
by wind speed.
2. At long ranges (beyond 1,000 yards the average reverberation is independent of wind speed.
3. With high wind speed the reverberation level
drops rapidly.
4. With low wind speeds, the reverberation
drops more slowly.
The dependence of the short-range reverberation
on wind speed clearly indicates that at ranges
shorter than 500 yards and at high wind speeds,
surface reverberation completely dominates volume reverberation. This conclusion is supported
by observations made at nearly the same time with
horizontal and vertical beams. At high wind
speeds and at short ranges the reverberation levels
obtained with a horizontal beam are much higher
than those obtained with a tilted beam. Figure
1-32 shows data of this type taken at a wind speed
of 17 miles per hour. Points A and B represent
deep scattering layers. Comparison of the two
curves shows that in the first 100 yards the horizontal reverberation is about 20 db above the vertical
reverberation. Two scattering layers (A and B)
are also shown in figure 1-32 at depths of 80 and
400 yards.
24
At low wind speeds (curve 2 of figure 1-31) the
short-range reverberation is volume reverberation.
The evidence for this statement is afforded by experiments of the type described in the previous
paragraph. When such measurements are made
at very low wind speeds, with the sea dead calm,
the horizontal reverberation is much lower than in
figure 1-32 and agrees well with the vertical reverberation. These measurements indicate that at
very low wind speeds, volume reverberation is
dominant and surface reverberation is negligible.
Finally, at long ranges (figure 1-31) the reverberation is independent of wind speed. This fact
is taken as evidence that at these ranges, volume
reverberation always dominates surface reverberation.
Thus, three main conclusions may be drawn regarding deep-water reverberation with a horizontal
beam.
1. At short ranges and high wind speeds, surface
reverberation is high and dominates volume
reverberation (curve 1, figure 1-31).
2. At short ranges and low wind speeds, surface
reverberation is negligible and volume reverberation is dominant (curve 2, figure 1-31).
3. At long ranges (beyond 1,000 yards), volume
reverberation dominates at all wind speeds
and is independent of wind speed.
Surface and volume reverberation will now be
considered in more detail.
SURFACE REVERBERATION
The discussion of surface reverberation given
earlier in this chapter predicts an inverse third-power dependence on range. An example of this
dependence is shown in figure 1-33. The data
shown in figure 1-33, A, were taken with a transducer, almost nondirectional in the vertical plane
and mounted at a depth of 20 feet. Short pings,
6.4 yards long, were used. Wind speed was about
15 miles per hour, so that the resulting reverberation could be identified as surface reverberation.
The observed points agree well with the theoretical
inverse cube law.
Figure 1-33, B, is a reverberation curve taken
the same day under similar conditions. However,
the transducer had a pattern in the vertical plane
which was highly directional. The axis of the
beam was horizontal in both cases. The theoretical curve takes account of the beam pattern.
At very short ranges the active surface area is
energized by the outer portions of the beam,
beyond the angle α; these portions emit sound of
a lower intensity than the main beam, and the
receiver has a lower response at large angles than
on the axis; thus, there is a noticeable drop in the
reverberation level. This drop can be calculated
from the beam pattern, as shown by the solid
curve. At ranges greater than 80 yards the active
area is energized by the main beam only, and the
measured reverberation levels fit the inverse
third-power line closely.
The curves in figure 1-33 must not be regarded
as universal. Examples of reverberation curves
that show an inverse fifth-power variation of the
reverberation with range are frequent. Curve 1
of figure 1-31 is an example. The reason for this
rapid decay is not understood.
There is a thermal condition in which the surface
reverberation is frequently observed to drop off
more rapidly than the inverse cube. This can be
explained by conditions of strong downward
refraction. The reverberation would be expected
to decrease at that range where the sound beam is
bent away from the layer of surface scatterers.
Figure 1-33 -Comparison of observed and calculated surface
reverberation. A, Measurements made with a transducer
that was almost nondirectional in the vertical plane; B, data
taken the same day under similar conditions, but with the
transducer turned so that its directivity in the vertical plane
was high.
25
Figure 1-34 -Effect of downward refraction on reverberation.
A, Bathythermograph and corresponding ray diagram; B,
comparison of observed results with those calculated from
simple theory.
Figure 1-34, B, shows an example of this drop,
indicated by the arrow. It occurs at about 300
yards; at greater ranges the reverberation level is
about 20 db below the value as given by equation
(1-42). The data were taken with short (9-yard)
pings. The transducer depth was 20 feet and the
wind speed 12 miles per hour. The ray diagram
based on the bathythermogram in figure 1-34, A,
shows that the limiting ray leaves the surface near
the 300-yard range (indicated by an arrow), thus
affording support for the preceding suggested
explanation.
Figure 1-35 -Dependence of reverberation level at short rang
(100 yards ) on wind speed.
The dependence of surface reverberation on
wind speed is very marked at short ranges, as can
be seen in figure 1-31. At 100 yards the reverberation level at high wind speeds is some 35 db
above that for low speeds, but at 500 yards the
difference is only 10 db. The rapid increase of
reverberation at 100 yards is seen more clearly in
figure 1-35, in which the average reverberation
level is plotted against wind speed.
The reverberation level is constant for wind
speeds up to 6 miles per hour. This confirms the
conclusion that volume reverberation is dominant
at these low wind speeds. For wind speeds of 6
to 20 miles per hour the reverberation increases as
much as 35 db; the curve then levels off, and above
20 miles per hour there is little further dependence
on wind speed. This dependence on wind speed is
closely correlated with the roughness of the sea.
At 6 miles per hour the wind is strong enough to
roughen the surface appreciably; occasionally,
wavelets may slough over, but no well-developed
whitecaps begin to appear, and when the wind has
reached 20 miles per hour the sea is liberally
covered with them. When this stage is reached,
further increase in whitecaps has no effect on the
reverberation.
It has been pointed out that surface reverberation in the ocean rarely exhibits the inverse third-power dependence on range which is predicted by
the simple theory. This lack of agreement is
found even at short ranges (100 to 500 yards), as
shown by the steep slope of curve 1 in figure 1-31.
Thus, it is clear that even the average surface
reverberation cannot be fitted by equation (1-42)
at all ranges. It is possible, however, to apply the
equation to the observed reverberation level at one
range to obtain the scattering coefficient as a
function of wind speed.
VOLUME REVERBERATION
The simple theory of volume reverberation that
was developed earlier and that assumed inverse
square transmission and uniform distribution of
volume scatterers predicts an inverse square dependence on the range. The first assumption is
approximately valid at short ranges but breaks
down at long ranges because of refraction and
attenuation effects. The second assumption is
sometimes valid over a limited region; in general,
26
however, the horizontal stratification of the scatterers invalidates the assumption that they are
uniformly distributed. Thus, it is clear that the
two basic assumptions made in the simple theory
are usually not satisfied.
In order to take account of refraction and the
uneven distribution of scatterers, it would be
necessary to carry out a volume integration over
the active scattering volume at each range. There
is insufficient data to warrant such a complex
theory. The correction for attenuation, however,
is easily made in connection with the calculation
of the volume-scattering coefficients. Finally,
surface reflection, on the average, raises the reverberation by an additional 3 db. Thus, for a horizontal beam, the theoretical volume reverberation,
corrected for surface reflection and attenuation, is
RLv=Jv+10 log (mro/2)-20 log r-2ar+3 (1-45)
Figure 1-36 -Comparison of calculated and observed volume
reverberation, showing the close agreement.
The observed volume reverberation beyond
1,000 yards agrees closely with the theoretical
reverberation given by equation (1-45) for typical
values of a and m. This is shown in figure 1-36.
Curves 1 and 2 are the observed averages at high
and low wind speeds. Curves 3 and 4 were calculated from equation (1-45) using attenuation
coefficients of a=0 and a=0.0045 db/yard. The
latter is typical of good transmission at 24 kc.
For the remaining parameters the following
values were used:
Jv=-25 db ro=80 yards m=10-6 yards-1.
The importance of attenuation at long ranges
is shown strikingly by the large differences between
curves 3 and 4. Thus, at 5,000 yards the attenuation reduces the reverberation level by about
45 db below the inverse square value of curve 3.
Note that the shape of the theoretical curve 4
beyond 1,000 yards is determined largely by the
particular value of the attenuation coefficient a.
To return to the fit between equation (1-45)
and the average curve at long ranges-not only
does curve 4 fit the average volume reverberation,
but it also fits most individual reverberation
curves fairly well. These results indicate that
the long-range volume reverberation is due largely
to a deep scattering layer. These scattering
layers may be colonies of plankton, or fish feeding
on it, or bubbles generated by it. Further
evidence for this conclusion is afforded by the
fact that at short ranges, where the sound beam
has not yet reached the deep scattering layer,
the observed volume reverberation (curve 2) falls
below the theoretical curve.
It has been remarked that beyond 1,000 yards
most individual reverberation curves fit curve 4
closely. This is true over a wide range of oceanographic conditions, with one exception: no significant dependence has been found on wind speed,
sea state, location, season, or thermal structure
of the ocean.
The exception occurs under conditions of
extremely sharp downward refraction and provides
an interesting check on the importance of the
deep scattering layer.
The effect of sharp downward refraction is to
concentrate the sound beam into a relatively
narrow cone. This produces a maximum in the
reverberation curve at the range where the sound
beam reaches the layer. An example of this
effect is shown in figure 1-37, where refraction and
reverberation are compared for 2 days.
On the first day there was a deep mixed layer
extending from the surface to a depth of 40 yards.
Figure 1-37, A, shows the ray diagram and the
deep scattering layer indicated by the shaded
portion. The angle shown on each ray is the
angle of the ray at the projector, measured
downward from the horizontal: the ray of 6° is
the effective lower edge of the sound beam. Two
days later, on March 17, the same deep layer was
still present, but thermal conditions had changed
27
radically, producing the strong downward refraction shown in figure 1-37, B.
Typical reverberation curves for each day are
shown in figure 1-37, C, together with the theoretical reverberation (curve 4), of figure 1-36.
The reverberation observed when there was a
mixed layer (curve 1) agrees well with the theoretical curve 3 between 1,000 yards and 2,500
yards; beyond 2,500 yards it reaches the noise
level and flattens out. Curve 2, on the other
hand. observed when there was sharp downward
Figure 1-37 -Comparison of reverberation and refraction for
2 days. A, Ray diagram for March 15, 1945; B, ray diagram for March 17,1945; C, observed reverberation for these
2 days compared with calculated values.
refraction, shows a large maximum near 2,000
yards, corresponding to the range at which the
central portion of the sound beam reached the
depth of maximum scattering (figure 1-37, B).
At short ranges, curve 1 rises steeply with decreasing range. This rise is due to surface reverberation and is to be expected, because the data
were taken at a wind speed of 20 miles per hour.
The data of curve 2 were taken at a wind speed of
12 miles per hour; it shows a corresponding rise in
the reverberation level at very short ranges (100
yards), but there is a minimum when the sound
beam has left the surface and has not yet reached
the scattering layer. When the lower edge of the
beam reaches the deep layer (about 1,000 yards)
the reverberation begins to increase with increasing
range, culminating in the main maximum.
BOTTOM REVERBERATION
Because in echo ranging, the transducer is
generally near the surface, the sound scattered
back from the bottom provides an important contribution to the reverberation only in shallow
water; here, however, it may well be the dominant
factor in limiting the range from which detectable
echoes can be obtained.
When the reverberation is caused by the surface,
it is the state of the sea that determines the intensity of the scattered sound; bottom reverberation
levels may be expected to depend on the character
of the sea bed. In practical work four types of
bottoms are recognized-(1) rock, (2) sand, (3)
mud and sand, and (4) mud. The criterion of
classification is the size of the particles constituting
the sea bed, as determined by examining samples
obtained by sounding with special devices. Recently, also, techniques of underwater photography
have been perfected and have proved useful in
studying the bottom. The difference in reverberation intensities among these types of bottoms are
discussed as follows in connection with the discussion of bottom-scattering coefficients.
It is obvious, from the discussion of figure 1-26
that any bottom reverberation will be combined
with volume reverberation and, when a horizontally directed beam is used, with surface reverberation. Thus, from the geometry of the experiment, it should not be expected that the measured
levels of predominantly bottom reverberation have
the levels predicted by the simple theory expressed
28
Figure 1-38 -Schematic diagrams illustrating surface and bottom
reverberation. A, No refraction; and B, strong downward
refraction.
by equation (1-44). It will be recalled that equation (1-44) applies to bottom reverberation as well
as to surface reverberation. In shallow water
over a bottom that scatters strongly, such as rock,
the bottom reverberation may be so much greater
than either the surface or volume reverberation
that a rough check of the theory is possible. If
this is attempted, however, the simple inverse
square loss will not provide a very reliable guide
to the total transmission loss. Consideration
must also be given to the loss due to attenuation
(absorption and scattering).
In addition, the effect of the surface in reflecting
the sound incident on it toward the bottom, from
which it may be scattered back to the transducer
either directly or by way of the surface a second
time, must be taken into account. If the surface
is considered to act as a perfect reflector, direct
sound at the bottom evidently will be doubled,
and thus the intensity of the scattered sound will
be doubled. Moreover, the reflection of this
scattered sound from the surface causes the intensity at the transducer to be doubled. Hence, the
239276°-53-3
surface increases the intensity of the reverberation
fourfold or, expressed in decibels, raises the reverberation level 6 db.
The effects of the refraction of the sound are
more difficult to evaluate. The bending and distortion of the sound beam affects the intensity of
the bottom reverberation in several ways. If the
beam is bent sharply downward, the sound strikes
the bottom at a shorter range and may be more
concentrated; the surface reverberation decays
very rapidly, And the bottom reverberation may
be more intense. This is illustrated schematically
in figure 1-38, A and B.
Figure 1-39 -Data of an experiment illustrating the conditions
shown in figure 1-38. A, Bathythermogram; B, ray diagram;
C, observed reverberation at water depths of 87 yards
(curve 1) and 210 yards (curve 2).
29
It is clear from figure 1-38, A, that, if the beam is
not refracted downward, surface reverberation
will be received continuously after the beam first
strikes the surface. On the other hand, as seen
from figure 1-38, B, a sharply refracted beam
strikes the surface in a limited area only; the surface reverberation consists of a burst of sound that
dies away very rapidly, to be followed by a second
burst of sound as the bottom reverberation comes
in.
These effects are shown in figure 1-39. The
bathythermogram shows the thermal pattern of
the sea when the reverberation shown by curves
1 and 2 in figure 1-39, C was measured. The two
curves represent reverberation in two different
depths of water (87 and 210) yards . The bending
Figure 1-40 -Comparison of calculated and observed reverberation in shallow water over mud bottom.
and distortion of the beam is seen in the ray
diagram; a dotted line is drawn showing the path
of the ray to be -6° in the absence of refraction.
The refracted ray of -6° strikes the bottom at
ranges shorter by 500 and 1,200 yards at the two
depths. Moreover, the beam is concentrated
between the ray of -1° and the upper limiting
ray. The expected rapid decrease in reverberation as the upper half of the beam strikes the
bottom is shown in curves 1 and 2 of figure 1-39, C.
They also show the expected rapid decrease of the
surface reverberation. The difference in levels
between the two curves is due to the difference in
ranges to the bottom in the two cases.
A large number of bottom-reverberation records
have been plotted and compared with the graph of
RL, as a function of r, as given by equation (1-44).
Figure 1-41 -Comparison of calculated and observed reverberation in shallow water over sand and mud bottom.
Of the terms in this equation, Js, and ro, are
known; the value of Hs, must either be predicted
or else obtained by making transmission measurements as nearly simultaneously with the reverberation runs as practicable. The magnitude of
the scattering coefficient n is, of course, not known;
hence that value of n which best fits the experimental points is considered to be the appropriate
scattering coefficient. In determining the best
fit give the greatest weight to the region of the
graph between 500 and 1,000 yards.
The agreement between the calculated and observed reverberation is illustrated by figures 1-40
through 1-43.
Each of these figures exhibits results of measurements taken over a particular bottom type. Two
theoretical curves are drawn for each bottom type
except mud, in which transmission data were
available only for poor transmission. The values
Figure 1-42 -Comparison of calculated and observed reverberation in shallow water over sand bottom.
30
Figure 1-43 -Comparison of calculated and observed reverberation in shallow water over rock bottom.
of H, were measured in conjunction with the reverberation measurements.
The experimental points represent averages of
from 5 to 30 reverberation runs. The quartile
deviation is about ± 5 db on the average. All
measurements were made using 80-yard pings.
It should be stressed that these experimental
data are not to be considered as representing
bottom reverberation generally in shallow water.
The measurements that yielded them were taken
over particular small patches of particular bottom
types. The curves serve, however, to convey a
fairly realistic picture of the main features of
reverberation in shallow water.
The four figures have certain features in common. The figures are good for all ranges less than
1,500 yards. Beyond this range the measured
reverberation is consistently higher than the
calculated one. Over mud bottom, the difference
is 10 db at 2,500 yards over sand and mud; it is
20 db at 2,000 yards. The reason for this divergence
TABLE 1 -Bottom Scattering Coefficients
Bottom type
10 log n
Rock
-22
Mud and mud sand
-30
Sand
-34
at longer ranges is not known. See table 1
for coefficients of bottom scattering.
FORWARD SCATTERING
The simple refraction theory predicts a "black"
shadow zone under conditions of strong downward refraction. This is not confirmed by transmission runs of 24 kc made in deep water off the
southern California coast. Sound of very low
intensity is observed out to ranges of 5,000 yards
(some 4,000 yards beyond the limit of the strong
direct sound field), which can be explained neither
as direct nor as bottom reflected sound. Instead
there appears good reason to believe that it is
sound scattered in the forward direction from a
deep scattering layer.
The general good agreement between the theory
and the observations, in the few cases that can be
checked, indicates two main conclusions:
1. Sound observed in the shadow zone under
conditions of sharp downward refraction is
forward scattering from the deep scattering
layer.
2. The scatterers in the deep scattering layer
are approximately isotropic; that is, they
scatter sound nearly equally in all directions.