The MK37 torpedo has been the primary weapon supplied to Canadian "O" Class submarines since OJIBWA first commissioned in 1965.
The torpedo was originally designed and manufactured in the USA to meet the requirements of both submarines and surface vessels for a quiet running acoustic homing A/S torpedo. Since its introduction this torpedo has been accepted and widely used by the USN and NATO forces including the CF.
Since it was first adopted the basic MK 37 has received a wide range of improvements resulting in several MK 37 MODS. All of the variations are basically similar in control features, acoustic ability and external appearances. The different MOD's give a choice in propulsion, speed and guidance capabilities.
Any MK37 can be fitted as a practice or warshot torpedo. The run of a practise shot is recorded on film for later analysis, both to determine the internal condition of the torpedo and to help the firing submarine to examine its tactics while using MK 37 torpedoes.
As tactical situations vary greatly the MK 37 has been designed to allow the firing submarine to select a wide range of search characteristics and, in some cases, to guide the weapon to its target.
This chapter on the MK 37 has been prepared to provide the submarine trainee with a simplified set of notes on the primary weapon of the Canadian "O" Class submarine.
12-6-02 TORPEDO SECTIONS AND COMPONENTS
Identification of major assemblies of a MK37 Mod 3 torpedo Fig 12-65.
12-06-03 TRANSDUCER
The transducer is mounted in the centre of the nose
of the warhead. It is contained in an oil-filled, neoprene-faced, removable unit. It is divided into four equal sectors, identified as up, down left and right. When transmitting it converts electrical energy to acoustic energy and when receiving converts acoustic to electrical energy. The information received from the transducer is processed by the acoustic panel. Signals from this panel are passed to the control section where they are converted to rudder and elevator movements to direct the torpedo to the target.
The transducer can operate in an active or passive mode. When active it produces a cone-shaped beam and "pings" of the target, and when passive it "listens" for target noises.
12-06-04 WARHEAD ASSEMBLY Fig 12-66
The warhead assembly consists of the following units within the warhead shell:
a) Explosive filling
b) Transducer
c) Exploder mechanism MK 19 Mod 1
d) After bulkhead
The exploder mechanism is an electromechanical device that detonates the explosive charge within the warhead upon impact.
The after bulkhead seals the after end of the warhead shell. At the bottom of the bulkhead there is a filling hole fitted with an airtight cover.
Running through the explosive filling, from the transducer to the bulkhead, is a conduit containing the wiring for the exploder circuits and the transducer.
12-06-05 BATTERY COMPARTMENT
The battery compartment is divided into two sections by a sealing bulkhead.
12-117
FIG. 12-67
TORPEDO BATTERY COMPT., AFTER BULKHEAD.
12-118
12-6-05 (Cont'd)
The forward, and largest, section is fitted to
accept the MK 46 Mod 0 or 1 primary and MK 53 Mod 0 secondary
batteries. Inside this section there is a centering pin to position the battery, a terminal assembly that mates with the battery socket connectors and two bus bars extending from the battery section to the tailcone. The bus bars have pin and socket connectors at the section joints.
The battery section is fitted with a relief valve that operates when internal pressure reaches 10 + 4 psi above sea pressure. This valve allows gases produced by the battery during a run to be vented to sea.
On the after face of the sealing bulkhead, Fig 12-67, are mounted the high and low speed contactor assembly, firing transformer, and two main motor disconnect fuses. These fuses are provided for overload and short circuit protection.
An anti-capture switch is mounted near the bulkhead at the top of the shell. This switch has seven positions which can be applied electrically or manually.
There are two vent ports located on the top of the battery compartment on either side of the sealing bulkhead. The forward one is used for venting the battery section. The after port allows venting of the torpedo assembly from the sealing bulkhead to the tailcone. Removal of the after vent plug provides access to the anti capture switch to allow manual settings to be applied.
During preparation of the torpedo for a run these vent ports are used to vacuum test the assembled torpedo for watertight integrity. When proven watertight the ports are then used to fill the interior with nitrogen at atmospheric pressure. The nitrogen eliminates damage to relay contacts caused by arcing when the torpedo is running.
On completion of a run opening the vents ensures that all gases produced by the battery are fully vented before disassembly of the torpedo is attempted.
12-6-06 AFTER BODY SECTION Figs 12-68 & 12-69
Enclosed in this section are the units that control the search pattern and attack characteristics of the torpedo.
Included in these units are the depth and stratum controls--a group of pressure switches that sense the depth of the torpedo and ensure that depth is maintained according to the type or run set.
12-119
FIG. 12-69
AFTERBODY TRAY EXTENDED, PORT SIDE.
FIG. 12-68
AFTERBODY TRAY EXTENDED, STBD. SIDE.
12-120
12-6-06 (Cont'd)
The afterbody tray contains several important assemblies. This tray is designed to slide clear of the afterbody shell to allow tests and adjustments to be made.
The assemblies are:
a) The acoustic panel which receives and interprets the signals received by the transducer.
b) The servo amplifier whose function is to convert AC signal voltages received from the acoustic panel and other sensing elements into DC signals of sufficient amplitude to energize the rudder and elevator controls.
c) The depth amplifier which receives inputs from five sensing elements with reference to depth and attitude of the torpedo. Three of these signals can be used at any one time. This information is passed to the summation amplifier the output of which goes to the servo amplifier.
d) Depth setting mechanism. - Depth orders are passed to this unit from fire control as a synchronous setting. During the run it provides a constant depth reference and supplies the depth amplifier with information.
e) A steering gyro Fig 12-70 which is used as a course reference during a run. This gyro is set by fire control as a synchronous setting prior to firing. During warm up the steering gyro is caged by a quick acting solenoid while the course is set on.
f) Two rate gyros, Fig 12-71, identical except for mounting position. The turn, or course rate gyro whose axis is fore and aft, monitors the rate at which the torpedo is turning. The pitch rate is mounted vertically and monitors the rate at which the torpedo pitches. The purpose of these gyros is to sense the rate of pitch and turn and transmit this information to the depth and servo amplifiers.
12-121
FIG. 12-70
STEERING GYRO.
12-122
FIG. 12-71
RATE GYRO.
12-123
12-6-06 (Cont'd)
g) Two identical pendulums, are positioned
athwartships for roll, the other fore and aft for pitch. They provide outputs indicating the roll and pitch angles of the torpedo. The output of the roll pendulum goes to the control unit, that of the pitch pendulum to the depth amplifier.
h) The inverter, consisting of a DC motor driving an AC generator. The drive motor is supplied directly from the control section of the battery. The generator produces 115 V, 40n cycle 3 phase. The voltage and frequency are automatically regulated. The inverter supplies the gyros and other electronic circuits requiring 400 cycle 3 phase.
j) Control Unit
The control unit is the torpedo control circuit switching and programming centre. Before firing it receives orders from fire control and selects torpedo circuitry for the type of run to be made.
During the run it receives information from the enabler, steering gyro, acoustic panel, roll pendulum and pressure switches. This information is processed to control the attitude of the torpedo.
The control unit consists of a top and bottom tray. Mounted on the trays are selector switches, relays and potentiometers associated with selecting and controlling the torpedo run. All timing functions, except "hold-in", are located in the control unit. Located in the bottom tray are four mercury switches which control dive and climb angle limits.
k) The pulse timer is located on the control unit upper tray. This unit controls the sequence and duration of the application of power on a repeat cycle basis to two control circuits, the transmitting circuit and the close-in reference. The timer also provides the "snake signal voltage" for controlling a sinuous pattern search.
12-124
12-6-06 (Continued)
The timer consists of a motor driving four sets of cam actuated switches and a continuously rotatable potentiometer, called the "snake pot". The cams are driven through one complete cycle every 1250 milliseconds ant the potentiometer through a complete revolution every 20 seconds. The cams provide doppler sampling, primary transmit, secondary (double pulse) transmit and close in determination timing.
12-6-07 POWER SUPPLIES
A number of power supply units are located in the afterbody section. These include:
a) High voltage power supply providing DC to the acoustic panel output and driver stages.
b) High voltage transformer which draws power from the inverter and supplies the "high voltage power supply".
c) The rectifier power supply which converts AC from the inverter and supplies the acoustic panel, depth amplifier, servo amplifier and relay control circuits with DC as required by the various circuits.
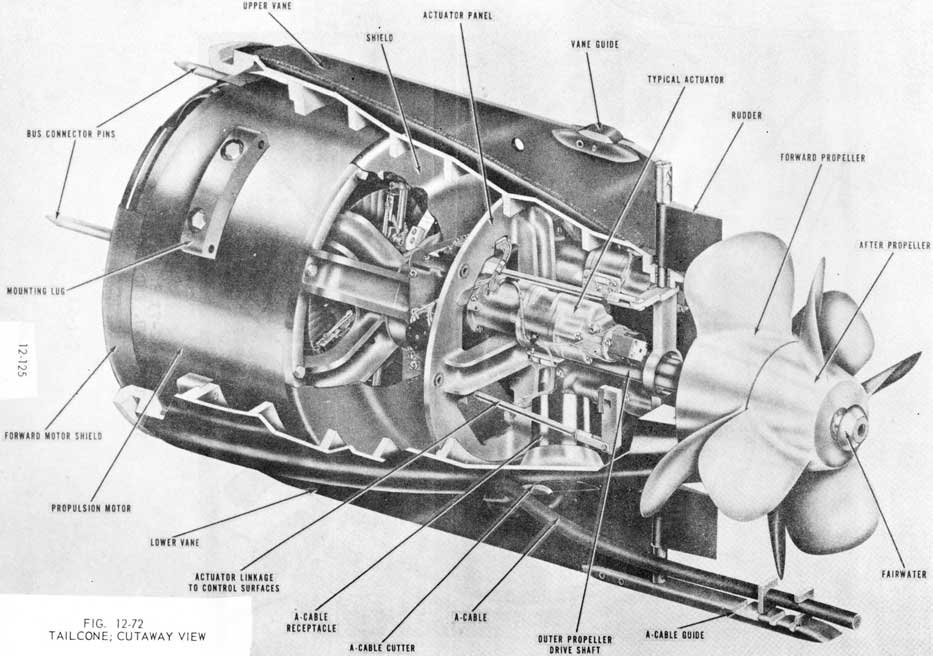
12-6-08 TAILCONE Fig 12-72 & 73
The tailcone is the aftermost section of the torpedo. It houses the propulsion motor, horizontal and vertical control actuators and the enabler.
The propulsion motor is a six-pole, series-wound, contra-rotating, electric motor. It has a rating of 35 hp in high speed and 11 1/2 hp in low speed. The armature drives the inner shaft and after propeller, the field assembly the outer shaft and the forward propeller.
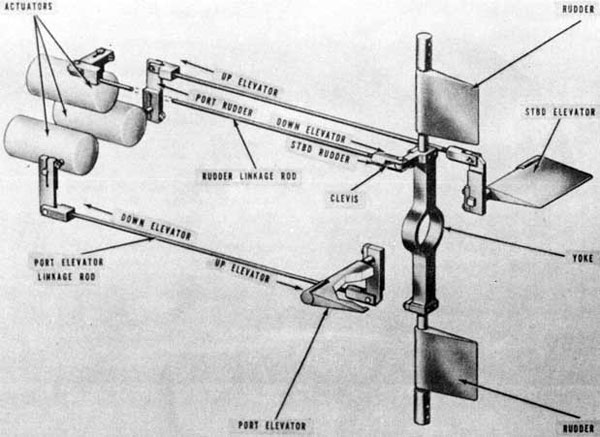
The outer shaft also drives a toothed rubber pulley which powers the actuators Fig 12-72. There are three
servo actuators, one each for the port and starboard elevators and one for the rudder. The elevators work in unison to provide depth control and independently for roll control. The servo actuators are controlled by the servo amplifier.
12-125
12-126
FIG. 12-73
TAIL CONE, FWD. END.
12-127
FIG. 12-74
TAIL CONE, AFTER END.
12-128
FIG. 12-75
ACTUATOR CONTROL OF ELEVATORS
AND RUDDERS.
12-129
12-6-08 (Cont'd)
To assist in controlling the attitude of the torpedo the servo actuators supply the following feedback information:
a) Rudder and elevator position is transmitted to control unit by means of the follow-up potentiometers.
b) Rate and direction of elevator and rudder movement is supplied to the control unit by tachometers.
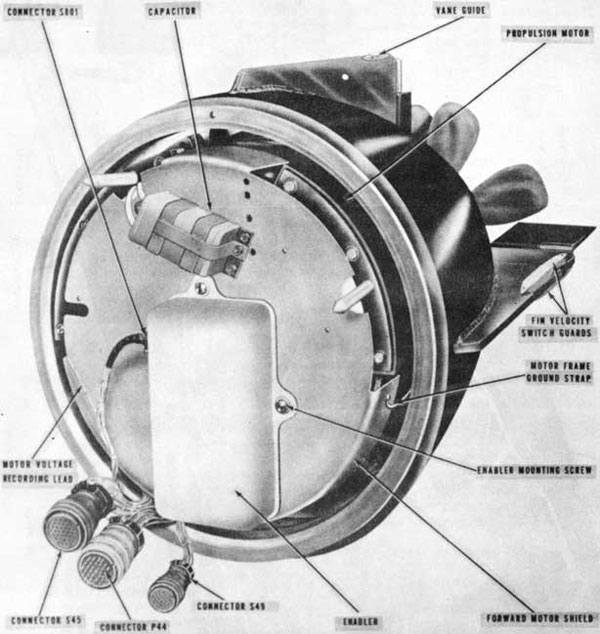
12-6-09 ENABLER
This important unit is mounted on the forward cover of the propulsion motor. This unit functions as a range measuring device. It determines the distance the torpedo has travelled by counting the revolutions made by the after propeller. The enabler is driven through a gear train and electromagnetic clutch. It is set prior to firing as a synchronous setting from fire control. The purpose of the enabler is to cause the torpedo to travel a pre-set distance on a straight course at set depth with its acoustic system inert. This allows the torpedo to close the target as rapidly as possible to a point where it can begin to search with as much chance of success as possible. It also ensures that the torpedo is well clear of the firing vessel before it becomes acoustically enabled.
Once this preset variable distance is run off the torpedo becomes acoustically enabled and will commence its pre-set search pattern.
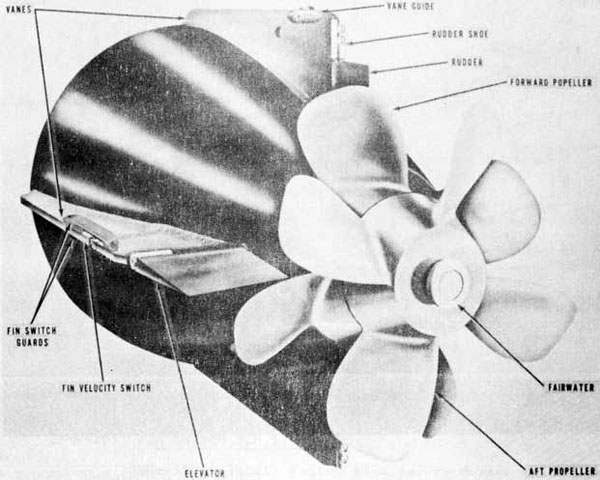
12-6-10 FIN SWITCH Fig 12-76
The fin velocity switch is a safety device which prevents the enabler from starting until the torpedo leaves the tube and reaches a speed of 13 + 1 knot. On firing, the torpedo automatically leaves the tube at high speed. If the torpedo is set to run at "low" or "low to high" speeds the operation of the fin velocity switch will cause the speed shift to occur.
12-130
FIG. 12-77. CUTTER OPERATION
Fig. 12-76 Tail Cone Port Side
12-131
12-6-10 (Cont'd)
The switch operating components, flag and leaver, are mounted externally on the outboard edge of the port vane. The switch itself is inside the tailcone, the two parts being connected by a shaft. A bore riding guide is mounted with the flag and lever and prevents these from operating while the torpedo is in the tube. The lever is spring loaded and prevents movement of the flag until the torpedo reaches the desired speed. At this point water flow will force the flag over
against the lever spring pressure, rotate the connecting shaft and operate the fin switch.
12-6-11 "A" CABLE RECEPTACLE Fig 12-76 & 12-77
This is located on the port underside of the tailcone. The "A" cable is connected to the torpedo at this receptacle. Electrical control settings and firing voltage are transmitted from fire control through the "A" cable into the torpedo.
The "A" cable cutter is mounted on the receptacle. This cutter is designed to sever the cable when the torpedo starts its forward movement. The cutter blade is razor sharp and cuts the cable off flush with the tailcone thus eliminating cavitation in the receptacle area.
12-6-12 "A" CABLE GUIDE Fig 12-76
The "A" cable guide is mounted on the outer edge of the lower vane. It guides the cut cable clear of the propellers and control surfaces as the torpedo moves forward. The two guide pieces are spring loaded and hinged to snap into shaped recesses after the cut cable has slipped through.
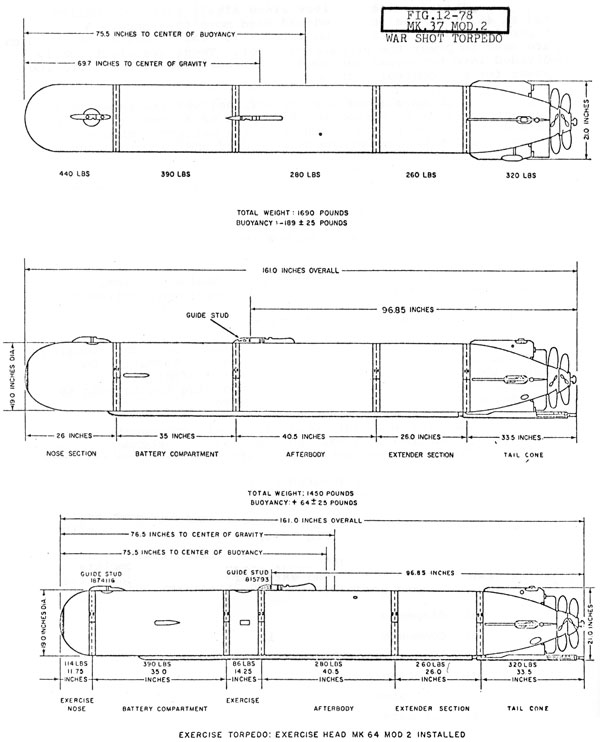
12-6-13 EXERCISE TORPEDO - Fig 12-78
Any of the MK37 series torpedoes can be adapted to run as exercise shots. The only warshot section not used in the exercise configuration is the warhead. This enables all sections effecting the control of the torpedo to be operated as they would be in a warshot. In order to check the performance of these sections they are connected to a recorder unit which converts their electrical and mechanical actions into a film trace. This trace can later be analyzed to ascertain the performance of the various assemblies. Repairs and adjustments can be made based on the film trace evaluation.
To convert a warshot to an exercise shot the
warhead, complete with transducer is removed. A short ballasted exercise head containing a transducer is fitted in its place.
An exercise section containing the recorder unit is fitted between the battery section and afterbody.
12-132
FIG. 12-80
EXERCISE SECTION, AFTER END.
FIG. 12-79
EXERCISE SECTION,FORWARD END.
12-133
12-6-14 EXERCISE NOSE
This section is 11.75 inches long and weighs 114 lbs. It contains a transducer and a horse shoe shaped lead weight for ballast. It is fitted to an exercise shot in conjunction with the recorder section.
Fitted between the battery section and afterbody. Contains instruments for programming an exercise run and for recording the functions of the control, acoustic and power units for post run evaluation. The following units are included in the exercise section:
a) Oscillograph
This has 14 recording channels for recording the various functions on film.
b) Exercise Timer
This timer is manually set, electrically driven and shuts down the torpedo at the preset time. At time aero the timer will shut down the propulsion motor and start the locating kocker. At zero plus 20 secs it will shut down the control section.
c) Depth Transmitter
Consists of one of three interchangable
switches, each designed to operate in a different depth range. These are used to transmit depth information to the recorder.
d) Depth cut out unit (D.C.O.)
One of four non-adjustable interchangable units would be fitted. These switches operate when the torpedo exceeds the depth set on the unit and shut down the torpedo.
e) Exercise ceiling switch
This switch prevents the torpedo from going above the preset ceiling. Two interchangable switches are available.
12-134
12-6-15 (Cont'd)
f) Hit cutout assembly (HCO)
This assembly consists of a relay and a switch that operate to shut down the torpedo when it hits the target.
g) Attack cutout (ACO)
As an alternative to HCO this unit will shut down the torpedo 8 seconds after close-in has been established.
ACO or HIT can be selected in the exercise section by means of a selector switch accessible
through the exercise section handhole.
12-6-16 TORPEDO BATTERIES
Two types of battery are used in the MK 37 torpedo: the primary battery, normally only used for warshots, and the secondary battery, used in practise torpedoes.
12-6-17 PRIMARY BATTERY, MK 46
This is a silver zinc alkali battery that can be used once only and cannot be recharged. It consists of two sections, each of which is referred to as a propulsion section. A
typical primary battery has 28 cells in each section, one of which is tapped at the nineteenth cell to supply power to the control section. This group of 19 cells within a propulsion section is known as the control propulsion section. These
cells are larger than the others because of the additional load requirements.
The number of cells in a battery may vary as the design of the battery varies with the manufacturer.
The battery electrolyte is stored in a container above the cells. At firing squibs are detonated releasing gas under pressure into the electrolyte tank. This forces the electrolyte from the tank through a manifold into the individual cells.
This battery is equipped with a blanket heater which operates on power supplied from the Torpedo Order panel and will maintain the battery at optimum operating temperature until firing.
12-135
12-6-18 SECONDARY BATTERY MK 53 MOD 0
This is also a silver zinc alkali battery. Unlike the MK 46 it can be recharged and used more than once. A
typical secondary battery consists of 78 plastic cells, 60 of which are used to power the propulsion motor. These are electrically divided into two equal sections. The remaining 18 cells provide power for the control section.
A fully charged battery will deliver its rated load current for a short period at high speed or a somewhat longer period at low speed without damaging the battery. Within these time limits the battery may be used and recharged several times.
These times may however be doubled for both low and high speed with consequent permanent damage to the battery making recharging impossible.
This battery is installed with the electrolyte added and fully charged.
The MK 53 is not fitted with a heating system, however the output is affected only by temperature extremes.
12-6-19 TORPEDO MK 37 MOD 2 Fig 12-78
The MOD 2 is a MOD 3 with command enable and steering guidance capabilities added. These allow the submarine to enable the torpedo and to change its course after firing. These features are made possible by connecting the torpedo to a director console by a communication wire.
The wire and additional electronic components required are carried in a section known as the extender
section. This is fitted between the afterbody and the tailcone.
The director is located in the Control room and forms part of the fire control system.
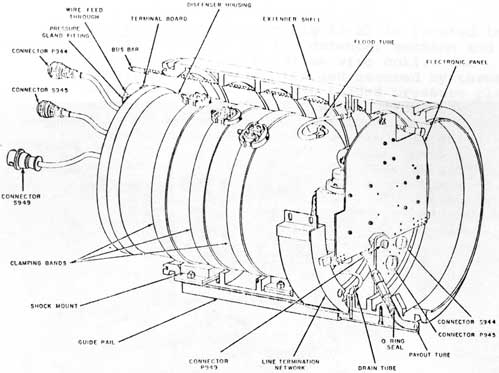
12-6-20 EXTENDER SECTION Fig 12-81
This section is 26" long, weighs 260 lbs complete and is fitted with a keel. The extender section contains the following:
a) dispenser housing
b) communication wire coil
c) line termination network
d) electronic panel
e) oscillator
f) bus bars
12-136
FIG. 12-78
12-137
FIG. 12-81
EXTENDER SECTION
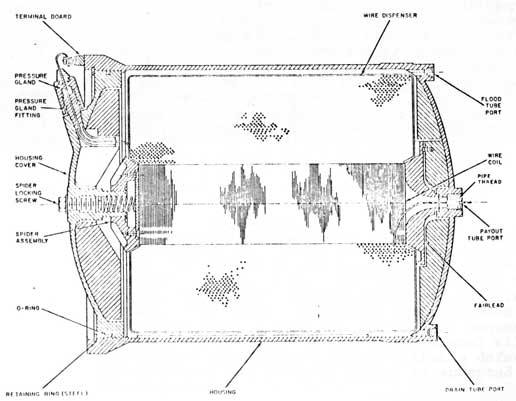
FIG. 12-82
COMMUNICATION WIRE DISPENSER
12-138
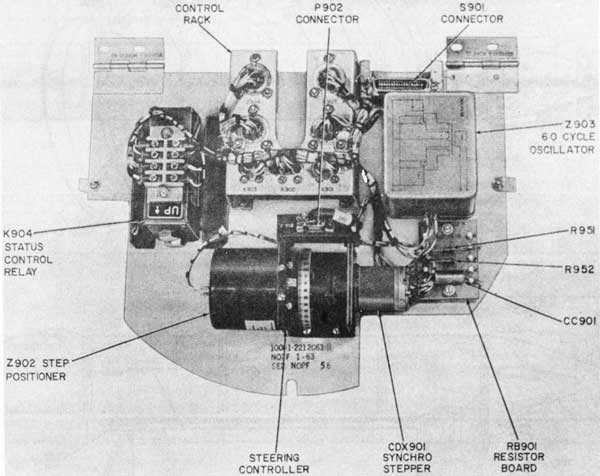
FIG. 12-83
ELECTRONIC PANEL
12-139
12-6-20 (Cont'd)
a) The dispenser housing Fig 12-82 is located in the forward part of the extender section and contains the communication wire coil. The housing is shock mounted and secured by three clamping bands. A spring-loaded pressure plate, or spider is mounted inside the front cover. This spider exerts force against the wire coil to hold it firmly in place. Also fitted on the front cover is a pressure gland through which the inboard end of the communication wire passes. The outboard end of the wire leaves the
housing via a connecting tube. This tube is attached to the pay-out tube which leads the wire through the keel and clear of the propellers.
The interior of the dispenser housing is free flooding through the pay-out tube and through a tube fitted from the top after end of the
housing to the extender section shell.
b) The communication wire is No. 24 single-core insulated and jacketed copper wire. A full coil contains sufficient wire for a war shot run. It is slightly negatively buoyant which ensures that it will not sink too quickly during a run and create "drag".
c) The inboard end of the wire is connected to a terminal board which leads to the termination network. This unit is mounted in the after end of the extender shell. This network provides circuits which pass the command signals from the submarine to the torpedo circuits concerned. The network also passes the status signal from the torpedo to the submarine.
d) The electronic panel Fig 12-83 is mounted on a hinged plate in the after end of the extender panel. It contains all necessary electronic components required to receive and channel steering and enable signals and to transmit the status signal.
e) A 60 Hz oscillator generates the status signal. The oscillator is a component of the electronic panel. The status signal operates a light on the director console. This light indicates that the torpedo can receive command enable and steering signals. The phases of the run are indicated by the status light displaying a different sequence for each phase. Loss of the status signal will indicate to the director operator that a defect has developed and commands cannot be accepted by the torpedo.
12-140
12-6-20 (Cont'd)
f) The propulsion bus-bars continue through the extender section and are fitted with the usual pin and socket connectors.
12-6-21 COMMAND ENABLE
Before firing an enabling distance is set on the torpedo enabler by fire control. During the run it may be desirable to commence the search prior to the pre-set distance being reached.
To achieve this a command enable, or "search" signal can be transmitted to the torpedo after the minimum 300 yd safety distance has been run. Receipt of this order, transmitted from the director console, will acoustically enable the torpedo and start the pre-set search pattern.
Regardless of whether the torpedo is command enabled or enabled at the pre-set distance the status light will indicate enable whenever it takes place.
12-6-22 COMMAND GUIDANCE
Command guidance, or "steer" signals may be transmitted to the torpedo after firing and after status has been received. Left and right "steer" signals may be transmitted at any point in the run until close-in is established. Each steer signal will alter the course by 2° left or right of the original
course. Steer signals may be transmitted at a rate of four commands per second.
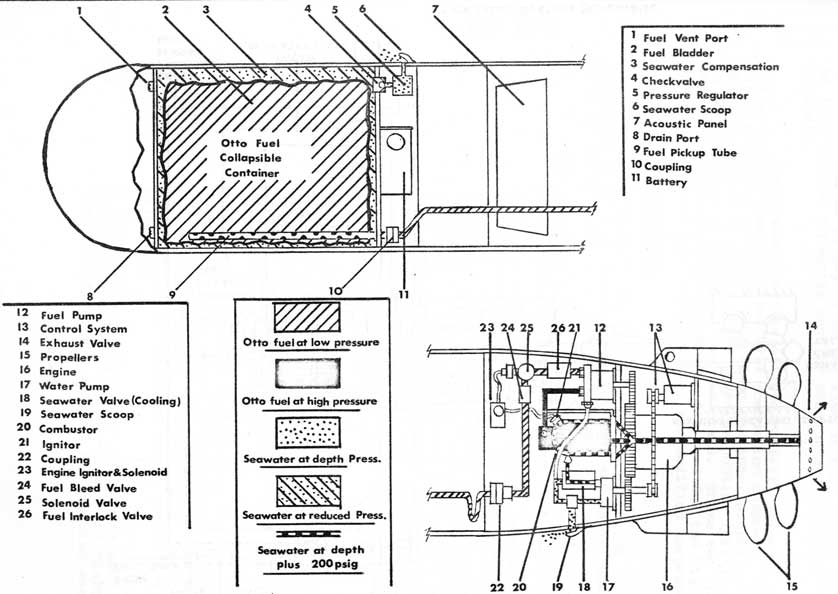
12-6-23 MK 37C TORPEDO (Fig 12-84)
This is the latest modification to the basic MK37 torpedo. It is intended that all existing MK 37 torpedoes used in the CF will eventually be modified. The most important result of this change is to greatly improve the speed, range and active acoustic capabilities of the torpedo.
The conversion requires the following changes.
1) Substitution of the MK 46 cam piston liquid chemical fueled engine for the electric motor.
2) Substitution of a fuel tank for the present battery arrangement.
3) Replacement of the Electrical bus bars with fuel system piping and installation of an auxiliary battery.
4) Minor changes to the existing acoustic panel to increase acquisition range.
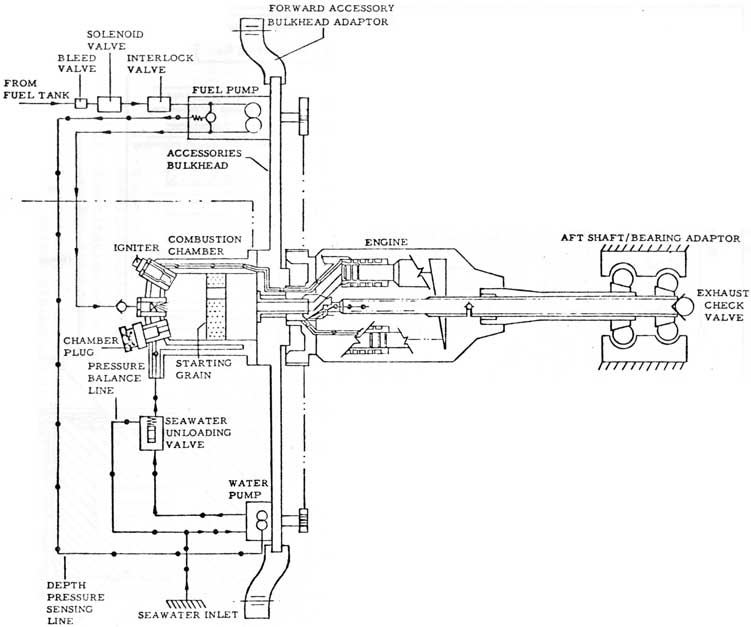
The MK 46 engine is the same as that fitted in the MK 46-1 torpedo presently used by the surface ships and aircraft.
The engine consists of five radially arranged pistons driven by hot gases supplied by a combustion chamber. The pistons drive a cam plate centered on the inner propeller shaft. The outer shaft is powered by a reaction housing rotating in the opposite direction to the cam plate. These two shafts drive contra-rotating propellers re-designed for the higher speed and altered load conditions of the modified torpedo.
12-6-25 MODIFICATIONS
Other changes related to propulsion include installation of gear driven pumps for fuel and water together with associated piping, valves and controls.
2) The battery compartment is modified to accept
a collapsible rubberized nylon fuel tank.
During a run, as fuel is consumed, the weight and balance of the torpedo are maintained by replacing the lost fuel with sea water. To admit the sea water a scoop is fitted in the top of the battery (fuel) section aft of the sealing bulkhead. Compensating water is admitted to the fuel compartment by a check valve which maintains a constant internal pressure. As well as compensating for used fuel the water pressure around the container will also ensure a constant fuel flow to the pump.
3) The bus bars are removed from all torpedo sections. A flexible fuel pipe is fitted from the fuel tanks to the fuel pump in the tail cone. Self sealing quick disconnect couplings are fitted at the fuel compartment sealing bulkhead and in the tailcone.
An auxiliary battery is fitted on the after face of the fuel compartment sealing bulkhead. This battery supplies all the power required by the control panel, acoustic panel, exercise instrumentation, exploder arming and engine start circuitry.
A squib activated "primary" battery is used for warshot weapons while a pre-primed and charged "secondary" battery is used for exercise weapons.
12-144
12-6-25 (Cont'd)
4) Some alterations have been made to the acoustic panel. These give an improved acquisition performance in the active mode only. The passive acoustic characteristics remain unchanged.
The acoustic panel has been shock mounted to isolate it from noise and vibration resulting from use of the MK 46 engine.
12-6-26 SPEED
There is only one speed for the MK 37 C modified torpedo. The speed selector at fire control will be used to select either the improved active acoustic system or the normal passive performance.
12-6-27 SAFETY
All the safety devices and circuits existing in the MOD 2 & 3 remain unchanged except for a modification to the fin velocity switch circuitry. In the event of a torpedo being fired but not achieving fin switch operation, either because it does not leave the tube or doesn't gain sufficient speed, the engine will shut down 15 seconds after "fire" voltage being received.
12-6-28 FUEL
The fuel used is OTTO fuel II. This is a chemical fuel and requires special handling procedures. The fuel is toxic and the gases produced by combustion of the fuel can be lethal. Submarine personnel would not normally come in contact with the fuel or its combustion gases except in the event of an accident. Procedures to cover accidents involving OTTO fuel II will be promulgated in Ships Standing Orders. These must be carefully studied, understood and adhered to by any personnel coming in contact with MOD C torpedoes.
12-6-29 ADJUSTMENTS
The increased speed of the torpedo necessitates some control gain adjustments. These are set on and checked during the post-conversion deck-check procedures.
12-6-30 ASSEMBLY
The MOD C modifications affect only the propulsion and acoustic (active) assemblies in the torpedo. Torpedoes incorporating these modifications will be referred to as either:
1) MK 37-C MOD 2 (wire guided)
2) MK 37-C MOD 3 (not wire guided)
12-145
12-6-31 TORPEDO PERFORMANCE
The performance characteristics of all MK 37 torpedoes are basically similar. This section includes all MK 37 MODS, the differences being noted as they occur during the run.
12-6-32 THE PHASES OF A RUN ARE AS FOLLOWS
1) Warm-up
2) Fire and fin velocity switch operation
3) Pre-enable
4) Enable and search
5) Acquisition, close-in and attack
6) Re-attack
1. Warm-up
During warm-up the torpedo is programmed for the run. This programming is applied to the control section of the torpedo by fire control and consists of seven basic variable settings plus Anti-capture.
Anti-capture can be set electrically when the torpedo is loaded in the tube and this feature is presently being incorporated in the TCSS NC 7 fire control system. It can also be pre-set by hand prior to loading.
Anti-capture has 12 possible settings, however only the first seven are in use at this time. One of these seven settings is selected depending on the sea state, depth of water and desired running depth of the torpedo. This feature prevents the torpedo from homing on false target contacts caused by surface turbulence and sea bottom conditions.
The remaining settings are all applied by fire control and transmitted to the torpedo through the 65 core "A" cable, "B" cable and "C-D" unit hook up.
2. Settings
The seven settings are grouped into two types, synchronous and non-synchronous.
Synchronous settings are transmitted by
synchro systems in fire control to the torpedo. They may be applied continuously up to the moment of firing and are used to apply the following:
a) Depth;
the running depth can be varied from
4 feet below the surface to maximum operating depth.
12-146
12-6-32 (Continued)
b) Gyro;
The gyro angle is relative to the centre line of the launch tube. This can be varied from 0° to 145° R or L of centre. If the set running depth is more than 100 ft from launch depth, 0° to 160° R or L of centre can be set. These restrictions of angle are designed to protect the firing vessel from a sharply turning torpedo. In the event that a torpedo passes the 160° limit it will shut down
(See ACR protection).
c) Enabling Range;
This is a distance the torpedo travels on a straight pre-set course at set depth with the acoustic homing system switched out. The distance may be varied from a minimum of 300 yds to a maximum of 9,500 yds. During the minimum 300 yd distance, detonation voltage is with held from the exploder.
The remaining four settings are non-synchronous and are set by step switches at the TOFI console.
These consist of the following:
a) Homing mode selection
This setting will determine the acoustic search method used by the torpedo after the enable distance has been run. The
selection is:
1. Passive
2. Active
3. Passive to Active (combination)
When combination is set, the torpedo will search and make its initial attach in passive. If it misses the target it will shift to active and all subsequent attacks will be made in that mode.
12-147
12-6-32 (Cont'd)
b) Speed selection;
1. High speed
2. Low speed
3. Low to high speed
When set low to high speed, the torpedo will search in low and shift to high once
close-in has been established.
For MOD C torpedoes these settings are used to select the improved acoustic feature. When "high" is selected the improved
circuits are cut in, when "low" is selected these are cut out.
c) Stratum selection;
1. Above limit
2. Below limit
3. No limit
These settings define the depth limits in which the torpedo will search. These limits are designed to cause the torpedo to search in a depth area different from that occupied by the firing submarine. Should the torpedo exceed the stratum limits set on, the detonator will be disabled and a depth control circuit will force the torpedo back into stratum.
3. Search Selection
Selection of the search pattern is made at the T.O.F.I. The three possible selections are:
1. Snake search
2. Circle right
3. Circle left
The search selected will be in effect throughout the run but may be modified by certain run conditions described in the search operation section.
12-148
12-6-34 FIN SWITCH OPERATION
Once the tailcone is clear of the tube the fin
switch will be free to operate and will do so when the torpedo reaches a speed of 13 kts or more. If this speed is not reached the torpedo will shut down shortly after tube exit.
Once the fin switch has operated the following will take place;
a) Torpedo's set for low speed will shift to low speed.
b) The exploder arming cycle commences and takes 15 seconds to complete.
c) The torpedo will immediately seek set course and depth. When these have been reached it will run straight until the enable distance has been run off.
d) The enabler is clutched in and starts to run off the distance set on.
e) Detonation voltage is with held from the exploder until the 300 yd minimum enable distance is run off.
f) On a MOD 2 a five second status signal is passed to the director to indicate fin switch operation and to prove guidance wire continuity.
12-6-35 PRE-ENABLE
During this phase the torpedo is running straight on the pre-set course, depth and speed as set by fire control.
The acoustic system is ready to operate but is cut out until enable.
The purpose of this phase is twofold, it allows the torpedo to close the target as rapidly as possible, and ensures that it is well clear of the firing submarine when the search pattern begins. In order to ensure the second qualification there is a 300 yd minimum enabling range built in. After this minimum distance has been run there is one more step necessary before the torpedo can begin to search--the acoustic system must adjust to the torpedo speed and to the turbulence caused by the torpedo moving through the water. This is referred to as transmit and doppler sampling. Doppler sampling is in operation throughout the run and affects passive homing. Transmit sampling takes place 150 yds before enable and ensures that the transmitting frequency is adjusted for the effects of torpedo speed.
12-149
12-6-35 Cont'd
After the minimum 300 yds have been run the following takes place;
a) Voltage is applied to the exploder
b) MOD 3 will continue as described until 150 yds before set enable when transmit sampling will take place.
c) A MOD 2 may receive course adjustments and can be command enabled by transmitting the appropriate signal through the communication wire.
12-6-36 ACR PROTECTION
Anti-circular run. If the torpedo alters course by more than 170° L or R of launch datum (tube centre line) it will shut down. This feature is available throughout the pre-enable phase as protection to the firing submarine.
12-6-37 ENABLE AND SEARCH PHASE
The search phase commences when the torpedo has become enabled, either by command in a MOD 2 or, when the pre-set enabling distance has run off in a MOD 3 or MOD 2 not enabled by command.
Enable
At enable the following takes place
a) In a MOD 2, set active and enabled by command there is a 10 second delay during which transmit sampling takes place.
b) In a MOD 2 enabled by command or by distance the status signal commences and is displayed as a constant light at the director console.
c) The preset search commences in one of the following patterns:
1) Snake search
2) Circle search, left or right of course, as selected.
3) Depth search
The patterns followed in these searches are:
1) The snake search is conducted along the set course and depth. If set depth is above 150 ft the torpedo describes a sinuous path in azimuth only, i.e., back and forth across set course.
12-150
12-6-37 (Cont'd)
If set depth is below 150 ft the torpedo also pitches up and down. The depth and azimuth patterns are so arranged that the torpedo path resembles a screw thread.
2) Circle L or R. If the set depth is above 150 ft the torpedo will describe a flat
circle at set depth, at a constant turn rate to left or right of the original set course.
3) A depth search results from a combination of settings either set by fire control or caused by certain run conditions. To achieve a depth search the following settings must be present:
(a) Set for a circle search
(b) Set NO or BELOW limit
(c) Running depth set below 150 ft
As a result of these settings the torpedo will search in depth as well as in azimuth. On being enabled the torpedo will circle upward at a constant turn rate and fixed angle from set depth to 150 ft. On reaching 150 ft the torpedo will dive back to set depth and repeat the pattern. The depth and azimuth patterns are so synchronized that the search path resembles a helix.
12-6-38 ACQUISITION AND CLOSE-IN
During the search phase the torpedo will acquire its target by receiving a return "echo" when set active or by receiving target noise of an acceptable level when set passive. Receipt of these signals will cause the torpedo to steer toward the target. When target indication signals reach a pre-determined level the acoustic and control sections will shift to the close-in condition. Once this shift has taken place the torpedo will remain in this condition until a hit is achieved or the battery expires.
12-151
12-6-39 CLOSE-IN AND ATTACK
Once close-in has been established the following changes take place.
1) In a MOD 2 the status signal changes to produce a quick flashing light at the director console.
2) The turning rate doubles if not already in use.
3) The pitch rate doubles.
4) If the speed set was "low to high" the torpedo will switch to high speed and remain at this speed.
5) The active transmission rate will double (double pulse).
The result of these changes is to cause the torpedo to attack the target with as quick a response to pursuit orders as possible.
During close-in the torpedo will have departed from its search pattern to pursue the target. Once close-in has been established the torpedo will set up for circle right search only. This pattern will be used in the event of a miss.
Stratum protection (above or below limits) will remain in effect during close-in. Should the target be outside the set stratum limits the torpedo cannot home in depth but will home in azimuth only.
Anti-capture settings will restrict depth homing before and after close-in when shallow water settings are used. They will not be in effect during close-in nor do they disable the exploder and so should not be considered as a form of stratum protection to the firing vessel.
During close-in the torpedo will accept course changes transmitted via the communication wire. They will not affect the course during close-in but will be "stored" for reference and course correction in the event of a miss and loss of target.
The torpedo should hit its target during the close-in phase. However, should it miss it will re-attack as long as it can regain contact.
12-152
12-6-40 RE-ATTACK
If the torpedo has not lost acoustic contact it will re-attack as per close-in condition.
If contact is lost the torpedo will attempt to reacquire the target and to re-attack. In this case one of the following patterns will result depending on the settings originally applied.
1) Hold in period
This will follow loss of contact regardless of settings. During this period the torpedo will follow the same course and angle it was on when contact was lost. The acoustic system if set "combination" will shift to active at double pulse rate. Hold in will last 4.25 seconds unless anti-capture settings are applied when it will last 2.2 seconds.
2) On completion of the hold-in period the following patterns will take place;
a) In a MOD 2 which received and stored course corrections during close-in the new course will come into effect.
In a MOD 2 the close-in status signal will cease.
b) If set NO or BELOW limits and running depth above 150 ft, on completion of hold-in the torpedo will make two full circles to the right at the depth the target was missed. It will then dive to set depth and continue to circle right.
c) If set depth below 150 ft on completion of hold-in the torpedo will make two full circles to the right at the depth the target was missed. It will then follow the depth search pattern--ie., circle to the right at a fixed upward angle to 150 ft then dive to set depth and repeat the pattern.
d) Set ABOVE limit, passive or combination, on completion of hold-in the torpedo will regain set depth and circle right continuously.
3) During any of these patterns the torpedo is
still in the close-in condition and will re-attack the target immediately if contact is re-gained.
12-153
12-6-41 PRACTICE TORPEDO SHUT-DOWN
On a practice torpedo the run duration time is set on the exercise timer before the torpedo is loaded. When this pre-set time has run off, the timer will shut down the propulsion motor at time zero and the control section 20 seconds later. At the same time a locating knocker will start to guide
the recovery vessel to the torpedo. The knocker will operate
until switched off by hand or until the battery expires.
During a run there are three other actions that will shut down the torpedo:
3) HCO - hit cut out, operates on hitting the target.
The operation of any of these switches will shut down the torpedo in the same manner as the timer.
12-154
PART 12 SECTION 7
FIRE CONTROL SYSTEM FOR CANADIAN SUBMARINES
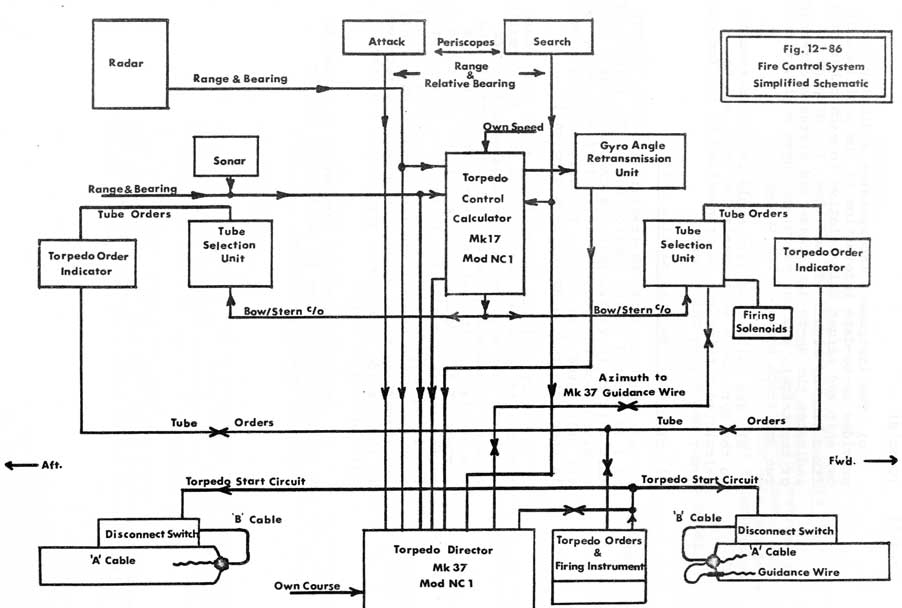
12-7-01 PURPOSE
The purpose of the system is to provide information to a selected torpedo when functioning as an unguided or as a guided torpedo that will intercept a target.
12-7-02 MAJOR UNITS
1) The major units in the system are:
a) Torpedo Control Calculator (TCC) MK 17 Mod 0
b) Gyro Angle Re-transmission Unit (GARTU) MK 2 Mod 0
c) Torpedo Order and Firing Instrument (TOFI) MK 1 Mod 01
d) Torpedo Order Indicator (TOI) MK 3 Mod 0
e) Torpedo Order Indicator (TOI) MK 4 Mod 0
f) Tube Selection Unit (TSU) MK 3 Mod 0
g) Tube Selection Unit (TSU) MK 4 Mod 0
h) Amplifier Assembly MK 129AA (2 off)
i) Torpedo Director MK 37
2) Torpedo Control Calculator
a) The torpedo control calculator (TCC) MK 17 is located in the Control Room. Its purpose is to calculate the instantaneous values of gyro angle and hitting run required by a selected torpedo to intercept a target. The type of torpedo to be fired is also selected at this instrument and the appropriate ballistic settings are applied to the computer.
NOTE: Enabling run, required by United States torpedoes, is applied as a function of hitting run.
b) To perform the calculation, the instrument requires inputs relating to:
(1) The position and characteristics of the target ship.
(2) The characteristics of own ship.
(3) The characteristics of the type of torpedo to be fired.
12-155
12-156
12-7-02 (Cont'd)
c) The instrument incorporates a display that provides up-to-date information of the positions of own ship and target ship relative to each other on a fixed line of sight. In addition, the display
indicates the up-to-date range and distance-off-track of the target, and the calculated gyro angle, time of run and track angle of the torpedo.
d) The calculated gyro angle is transmitted to the Gyro Angle Re-transmission Unit, and the calculated hitting run is transmitted to the Torpedo Order and Firing Instrument.
3) Gyro Angle Re-Transmission Unit
a) The Gyro Angle Re-transmission Unit (GARTU) MK 2 is located in the Control Room. The purpose of this unit is to re-transmit the calculated gyro angle, received from the TCC, at eleven different values around the calculated gyro angle. The calculated gyro angle is then referred to as the mean gyro angle.
b) This facility caters for a salvo shot where a number of torpedoes can be fired in a fan formation about the mean gyro angle, the angular difference between neighbouring torpedoes being determined by the angular spacing set into the instrument. The purpose of this method of attack is to offset the errors in the inputs and solution to the fire control problem by firing torpedoes ahead and astern of the calculated position of the target. In the instance where only one torpedo is to be fired, the gyro angle received by the torpedo is the mean gyro angle, i.e. the calculated gyro angle.
c) The re-transmitted gyro angle is routed as a synchro transmission to the torpedo via the Amplifier Assembly MK 129AA.
12-157
12-7-02 (CONT'D)
4) Torpedo Order And Firing Instruments
a) The Torpedo Order and Firing Instrument (TOFI) MK 1 is located in the Control Room. The instrument can be divided into four main panels, each panel associated with a set of functions as follows:
(1) The ordering and selection panel.
(2) The firing panel.
(3) The Synchronous settings panel.
(4) The Non-synchronous settings panel.
5) Ordering and Selection Panel
a) In Oberon and Porpoise class submarines (TCSS 7 MOD 0) there are eight tubes - six forward and two aft. It is therefore necessary to give indication to the forward and aft tube operators as to which tube is to be prepared for action and made ready.
b) If required, all tubes can be ordered to the action state and made ready, but only one tube can be selected at a time for firing. There is in addition an AUTO SELECT condition which incorporates a counting circuit which automatically selects each tube in turn enabling data on the torpedo to be inspected at a fixed interval.
c) The ordering and Selection Panel on the TOFI contains all the necessary push buttons which, when pressed, provide the appropriate indications to the forward or aft tube operators.
6) Firing Panel
a) The Firing Panel contains the DATA SET, TUBE READY and READY TO FIRE lamps, which illuminate only when the data has been accurately set into the torpedo, and the tube operator is ready.
b) The firing circuit is armed only when all lamp indications for the particular tube are achieved and the SAFETY SWITCH, located on the Firing Panel, is set to FIRE.
12-158
12-7-02 (Cont'd)
7) Synchronous Settings Panel
a) Synchronous settings are those settings that
are applied to the torpedo by means of synchro controlled servos. The settings are:
(1) Gyro angle
(2) Enabling run
(3) Depth
b) Of these three synchronous settings, gyro angle is calculated at the TCC and routed to the
selected tube via the GARTU and the Amplifier
Assembly MK 129AA. Hitting run is also calculated in the TCC and is transmitted to the TOFI, where it is displayed in the Enabling Run dial. An Enabling Run correction can be manually set at the TOFI and the corrected Hitting Run or Enabling Run is automatically transmitted via the Amplifier Assembly MK 129AA to the selected tube.
c) The torpedo running depth is manually set at the TOFI and is routed to the torpedo via the Amplifier Assembly MK 129AA as a synchronous Transmission.
8) Non-Synchronous Setting Panel
Non-synchronous settings are those settings that are applied to the torpedo by means of function selector switches. These settings, which can be described as on-off settings, apply only to some of the torpedoes controlled by the TCSS 7.
9) Torpedo Order Indicator
a) In Oberon and Porpoise class submarines, the Torpedo Order Indicator (TOI) MK 3 is located in the forward tube space and the TOI MK 4 in the aft tube space.
b) The TOI performs the following functions:
It provides lamp indications from the TOFI of:
(1) ORDER ACTION STATE
(2) STAND BY
(3) TUBE SELECTED
c) It provides push buttons to indicate at the TOFI that the tube or tubes are in the following states:
12-159
12-7-02 (Cont'd)
(1) REPEAT ACTION STATE
(2) TUBE READY
d) It causes the required supplies to be channelled to the selected tube and torpedo when the tube operator passes the action state back to the TOFI.
e) The forward TOI MK 3 has six TYPE OF TORPEDO selector switches, one for each forward tube, which enables various limiting functions and warning systems to be connected to the appropriate type of torpedo in the tube.
f) Both forward and aft TOIs have a FIRE lamp that illuminates momentarily when the selected tube is automatically fired, or in the event of a solenoid failure gives an indication for the operator to pull the hand firing lever.
10) Tube Selection Unit
a) In Oberon and Porpoise class submarines, the Tube Selection Unit (TSU) MK 3 is located in the forward tube space and the TSU MK 4 in the aft tube space.
b) Briefly, the TSU performs four basic functions:
(1) It channels the required supplies to the torpedo in the tube, when the tube operator has brought the selected tube to the action state at the TOI.
(2) It channels the synchronous and non-synchronous setting data to the torpedo in the tube, when the required tube has been selected for firing.
(3) It ensures, in the case of the forward TSU MK 3, that the firing supply is routed to the selected tube (see Note below).
(4) It ensures that, when a MK 37 torpedo is fired and being guided, another MK 37 torpedo cannot be selected for firing.
(5) It enables an intercept torpedo to be selected and fired during the guidance phase of a MK 37 attack.
NOTE: The firing supply applies to forward tubes only, where the tube firing gear is actuated by a solenoid. The firing mechanism for aft tubes is manually operated upon receipt of
the fire indication at the aft TOI.
12-160
12-7-02 (Cont'd)
11) Amplifier Assembly MK 129AA
a) In Oberon and Porpoise class submarines, there is an Amplifier Assembly MK 129AA in the forward tube space or accommodation space and another in the aft tube space.
b) The Amplifier Assembly MK 129AA receives the three synchronous transmissions, i.e. gyro angle from the GARTU, enabling run from the TOFI and depth from the TOFI. Three amplifiers in the assembly amplify the three transmissions and, when a tube is selected, drive the motors that set the corresponding information in the torpedo.
c) Included in the Amplifier Assembly is a Control Panel MK 80CP that enables the amplifiers to be tested. In addition, the Control Panel accommodates circuits that select the correct sector value for the synchronous function of the type of torpedo selected.
d) The Amplifier Assembly also houses a Data Set MK 6DS unit, which functions in conjunction with the three synchronous setting servo amplifiers: When the three settings have been received and accurately set by the torpedo servo motors, the unit operates to give the data set indication at the TOFI, and to provide one of the pre-firing conditions in the firing circuit.
12-7-03 TORPEDO DIRECTOR MK 37
1) Purpose of Equipment
a) The MK 37 Torpedo Director is provided as a means for steering wire-guided torpedoes to their target. The MK 37 Mod 1 torpedo requires guidance by the director. The torpedo is an electrically controlled and propelled, two speed torpedo with an active-passive acoustic homing system. A wire is used as a communications link between the torpedo and the firing ship. The torpedo is effective against either surface or submarine targets. It is launched from submerged
tubes as a swim-out torpedo and can be guided through the first 13,500 yards of its run.
12-161
12-7-03 (Cont'd)
b) The torpedo run consists of two phases: search and homing. Search commences either when the torpedo is at a preset distance from the firing craft or when a command search signal is initiated at the director. The start of search is called enabling and may occur anywhere between 300 and 9500 yards of torpedo run. There are two search modes: snake search, figure 1-2 and circle search, figure 1-3. Each mode has two patterns depending upon whether the torpedo is running above or below 150 feet. Each of these modes is preset. During the snake search the torpedo will respond to guidance commands. During circle search the torpedo ignores guidance commands.
c) Homing commences when the torpedo receives a target signal. Commencement of homing is called acquisition. Command guidance has no effect during homing except that if the torpedo is set for snake search, the torpedo accumulates guidance commands which it will respond to if the target is lost and search is recommenced.
d) During guidance of the torpedo the bearing rider mode of operation is employed.