The Glomar Explorer, Deep Ocean Working Vessel, Technical Description and Specification, 1975, describes the Glomar Explorer in the context of her cover story. Search on Glomar Explorer and Project Azorian to learn about her CIA sponsored mission to recover a Soviet submarine. Also see photos inside HMB-1 during 2011. At the bottom of HMB-1 tour there are additional documents describing Project Azorian and Glomar Explorer that readers of this document will want to explore.
In this online version of the manual we have attempted to keep the flavor of the original layout while taking advantage of the Web's universal accessibility. Different browsers and fonts will cause the text to move, but the text will remain roughly where it is in the original manual. In addition to errors we have attempted to preserve from the original this text was captured by optical character recognition. This process creates errors that are compounded while encoding for the Web.
Please report any typos, or particularly annoying layout issues with the Mail Feedback Form for correction.
CAUTIONARY NOTICE
PROPRIETARY RIGHTS OF GLOBAL MARINE
DEVELOPMENT INC.
This document, "The Glomar Explorer Deep Ocean Working Vessel - Technical Description and Specification," either discloses in part or touches upon certain technical information, developments and innovations which are regarded by Global Marine Development Inc. to be PROPRIETARY to it and to its related companies and associates.
Global Marine Development Inc. strives to respect the proprietary interests of others, and believes that others owe it the same respect. Therefore, no portion of the information or data contained herein may be reproduced, in whole or in part, in any manner or used for manufacture or other purposes, public or otherwise, unless the written consent of Global Marine Development Inc. has first been obtained pursuant to a formal request which shall 1) identify the portion hereof
CAUTIONARY NOTICE
PROPRIETARY RIGHTS OF GLOBAL MARINE
DEVELOPMENT INC.
(Continued)
desired to be reproduced or used and 2) state the purpose for which such re-
production or use is desired.
Certain of the technical developments described herein are the subject of pending or issued patents in the United States and in other countries. The patents issued include but are not limited to United States Patents 3,894,640, 3,918,379 and 3,918,380.
This brochure is intended to provide an introductory technical description of the GLOMAR EXPLORER, a unique deep ocean working vessel. This unusual ship incorporates many innovative engineering features which are significant advances beyond the present state of the art.
A limited distribution of this brochure is being made to acquaint interested persons with details of this technology. It is hoped that making others aware of the GLOMAR EXPLORER's capability to perform work in the marine environment heretofore considered impossible will stimulate those with imaginative and far reaching ideas to make use of this capability.
The Global Marine Development Inc. engineering design and systems management team brought the GLOMAR EXPLORER from concept to drawing board, and through construction to its first deep water operation in 29 months, a record time.
2
Global Marine Development Inc. would welcome inquiries or proposals from interested parties on possible applications of the GLOMAR EXPLORER's systems' technology.
Global Marine Development Inc. does not own the GLOMAR EXPLORER nor any of its subsystems, and therefore cannot guarantee the availability of said vessel nor of its subsystems. The purpose of this brochure is to demonstrate the technical capabilities and competence of Global Marine Development Inc. to design, develop, and fabricate a system encompassing the GLOMAR EXPLORER's capabilities.
3
4
HMB-1 with Tugs
5
SECTION I - INTRODUCTION
1-1
SECTION 1 - INTRODUCTION
The twin screw, diesel-electric powered GLOMAR EXPLORER is a ship-shaped vessel with an exceptional number of innovative technical features (see Table 1-1). The first of its kind, the ship was specially designed by Global Marine Development Inc. to dynamically maintain its position over a work site as deep as 17,000 feet while lowering or raising heavy subsea equipment or operating this equipment on the bottom. The ship is capable of carrying 25,000 tons of equipment, consumables, and stores, sufficient to allow a 100-day voyage without resupply.
Figure 1-1 shows the general arrangement of the GLOMAR EXPLORER. Tables 1-2 and 1-3 give general characteristics and principal dimensions; Table 1-4 outlines cargo capacities; and Table 1-5 indicates system performance characteristics. Miscellaneous equipment contained on board is listed in Table 1-6.
1-2
The ship meets or exceeds the applicable rules of the American Bureau of Shipping and is classed . In addition, the ship complies with the applicable requirements of governmental regulatory bodies, such as the U.S. Coast Guard, Federal Communications Commission, and U.S. Public Health Service.
TABLE 1-1. INNOVATIVE TECHNICAL FEATURES (CONTINUED)
ROLL STABILIZATION SYSTEM
- FOUR PAIRS MUIRHEAD-BROWN STABILIZERS
DYNAMIC POSITIONING SYSTEM
- FIVE 1750 HP TRANSVERSE THRUSTERS
- TWO 6600 HP PER SHAFT MAIN PROPULSION
DUAL PRESSURE AIR SYSTEM
- TWO COOPER BESSEMER AIR COMPRESSORS, 710 SCFM AT 3200 PSI EACH OR 1500 SCFM AT 1000 PSI
1-7
TABLE 1-2. GENERAL CHARACTERISTICS
VESSEL TYPE
- TWIN SCREW, DIESEL-ELECTRIC, DYNAMICALLY POSITIONED, DEEP OCEAN WORKING VESSEL
PORT OF REGISTRY
- WILMINGTON, DELAWARE
U.S. COAST GUARD CERTIFICATE
A.B.S. CLASSIFICATION
- OCEAN RESEARCH VESSEL, UNLIMITED OCEAN SERVICE
CONSTRUCTION
- WELDED STEEL, A.B.S.
CENTER WELL LENGTH
- 199'-0"
CENTER WELL BREADTH
- 74'-0"
NAVIGATIONAL DRAFT AT ASSIGNED LOADLINE
- 46'-8"
LIGHTSHIP DRAFT
- 25'-8" (WELL OPEN)
21'-l" (WELL CLOSED)
TRIAL SPEED
- 10.8 KTS
SERVICE SPEED
- 10.0 KTS
ENDURANCE
- 100 DAYS
NUMBER OF BERTHS
- 178 TOTAL
1-8
TABLE 1-3. PRINCIPAL CHARACTERISTICS
DIMENSIONS AND DISPLACEMENTS
Length Overall
- 618'-8"
Length Between Perpendiculars
- 589'-7"
Breadth Molded
- 115'-8-1/2"
Depth Molded to Main Deck at Side
- 50'-10"
Height to Derrick Top
- 263'-0"
Depth Below Baseline to Bottom of Gates
- 8'-10-1/8"
Draft at Summer Freeboard
- 46'-8"
Displacement at Summer Freeboard (Well Closed)
- 63,000 L.T.
Displacement at Summer Freeboard (Well Open)
- 47,000 L.T.
Displacement Light Ship (Well Closed)
- 21,100 L.T.
VCG Light Ship
- 46.90 Ft
LCG Light Ship
- 314.25 Ft
1-9
TABLE 1-3. PRINCIPAL CHARACTERISTICS (CONTINUED)
MACHINERY
5
Diesel Engines: Nordberg Model No. FS-1316-HSC Supercharged and Intercooled "V" Supairthermal Rated 4900 BHP at 514 RPM
5
Diesel Driven Generators: General Electric, AC Machines with a single bearing. Output - 3500 KW, 60 Hertz at 514 RPM, 4160 Volts, 3 Phase AC at 0.8 Power Factor
6
Propulsion Motors: General Electric Type MCF, 2200 H.P., 700 Volt, 2480 Line Amps, 800 RPM Shunt Wound D.C. Machines
2
Reduction Gears: Philadelphia Gear, Type 50 HMGH Horizontal Offset
5
Thrusters: 3 Bow and 2 Stern, Murry and Trequrtha, 102" Diameter, 4 Bladed Kaplan Type at 218 RPM. Motor 1750 H.P. at 900 RPM
PROPELLERS
2 Propellers:
1 Right and 1 Left Handed, 3 Bladed, 15'-0" in Diameter, each weighing approximately 26,000 pounds. Rated RPM 133
ANCHORS
4 Anchors:
Baldt Snug Stowing Type, each weighing approximately 20,000 pounds, with 1500 feet of chain marked every 100 feet
1-10
TABLE 1-4. CARGO CAPACITY
FUEL OIL
- 7263 L.T.
WASH WATER
- 1066 L.T.
STABILIZER TANKS (FRESH WATER)
- 2466 L.T. (OPERATING LEVEL)
- 4447 L.T. (FULL)
POTABLE WATER
- 396 L.T.
LUBE OIL
- 267 L.T.
HYDRAULIC OIL
- 330 L.T.
AVAILABLE SALTWATER BALLAST CAPACITY
- 12,708 L.T.
SLURRY MUD TANK CAPACITY
- 6860 FT3
LARGE LIFT PIPE
- 4253 L.T. (DRY AND STOWED)
UNDERWATER WORK PLATFORM
- 1000 L.T.
5" DIAMETER PIPE (IN CASING RACK)
- 500 L.T.
ASSIGNED STORAGE SPACES
- 3000 LINEAR FT OF SHELVING
UNASSIGNED SPACES
- 140,000 FT3
1-11
TABLE 1-4. CARGO CAPACITY (CONTINUED)
SHORING AND CRIBBING
- 100 L.T.
SHIP'S STORES
- 82 L.T.
REEFER CAPACITY
- 2973 FT3 FREEZE
- 5415 FT3 CHILL
1-12
TABLE 1-5. DESIGN AND OPERATING SPECIFICATIONS
I. UNDERWAY
Sea State
State 9 (storm conditions)
Wind Velocity
100 knots
Vessel Pitch Double Amplitude and Period
15°, 8.1 sec
Vessel Roll Double Amplitude and Period
60°, 11.5 sec
Vessel Heave Acceleration
.25 g
Stable Platform
Locked
Hoisting System
Not operating
II. DOCKING
Sea State
5 ft irregular seas, 4 ft swells (sea state 4)
Wind Velocity
20 knots
Vessel Pitch Double Amplitude and Period
4° 9 sec
1-13
TABLE 1-5. DESIGN AND OPERATING SPECIFICATIONS (CONTINUED)
Vessel Roll Double Amplitude and Period
4° 11 sec
Vessel Heave Double Amplitude and Period
5 ft, 8.8 sec
Stable Platform
Gimbal unlocked
Gimbal Pitch Double Amplitude
4°
Gimbal Roll Double Amplitude
4°
Hoisting System
10,000,000 lbs
III. OPERATING
Sea State
8 ft sea, 12 ft swells (sea state 5)
Wind Velocity
25 knots
Vessel Pitch Double Amplitude and Period
8°, 7.5 sec
Vessel Roll Double Amplitude and Period
15°, 15.3 sec
Vessel Heave Double Amplitude and Period
17 ft, 7.5 sec
1-14
TABLE 1-5. DESIGN AND OPERATING SPECIFICATIONS (CONTINUED)
Vessel Pitch Double Amplitude and Period
15°, 7.7 sec
Pipe Break Condition
Vessel Roll Double Amplitude and Period
22°, 15.8 sec
Pipe Break Condition
Vessel Heave Double Amplitude and Period
32 ft, 7.7 sec
Pipe Break Condition
Stable Platform
Unlocked
Gimbal Pitch Amplitude
10° (stop to stop)
Gimbal Roll Amplitude
17.2° (stop to stop)
Heave Compensation Amplitude
± 7 ft, working; ± 7.5 ft, stop to stop
Heave Compensation Live Load (max.)
20,000,000 lbs
Heavy Lift System
Not operating (load on Parking Brake)
1-15
TABLE 1-5. DESIGN AND OPERATING SPECIFICATIONS (CONTINUED)
Stable Platform
Unlocked
Gimbal Pitch Double Amplitude
6° Go to static hold mode
Gimbal Roll Double Amplitude
7° Go to static hold mode
Heave Compensation Double Amplitude
10 ft, (15 ft, stop to stop)
Heave Compensation Live Load
18,500,000 lbs
Heavy Lift System
Operating
Live Load (Static Plus Dynamic, Maximum)
14,000,000 lbs
Performance (Minimum)
14,000,000 lbs at 6 fpm
IV. STATIC HOLD - LOAD PLACED ON "PARKING BRAKE"
Sea State
12 ft sea, 18 ft swell (sea state 6)
Wind Velocity
50 knots
1-16
TABLE 1-6. MISCELLANEOUS EQUIPMENT
1. FOUR PEDESTAL MOUNTED, DIESEL POWERED, REVOLVER CRANES ON MAIN DECK
- 60, 80, 100 and 120 FT TO 35 TONS LIFT DEPENDING ON BOOM ANGLE
2. TWO DOUBLE DRUM WARPING WINCHES ON MAIN DECK
- 1650 FT 1-3/8 INCH WIRE, 60,000 LB LINE PULL (EACH), DIESEL POWERED WITH TORQUE CONVERTER
3. GANTRY CRANE ON FWD DECK
- 20 TONS
4. FOUR PART MOORING SYSTEM
- (4) 20,000 LB ANCHORS WITH 1500 FT 2-3/4 INCH CHAIN EACH
5. TWO MUD PUMPS
- NATIONAL 12-P-160 620 GPM @ 3650 PSI (EACH)
6. HELICOPTER DECK
- 90 FT X 75 FT (FOR LANDING A SIKORSKY S-61R HELO - 19,000 LBS)
7. TWO EM CABLES
- 18,500 FT 2.315 INCH CABLE (EA.), 75 KW POWER TRANSMISSION (EA.), PLUS 1 COAXIAL (EA.) AND 6 TWISTED PAIR (EA.)
8. DERRICK
- 1,000,000 LB CAPACITY
1-17
TABLE 1-6. MISCELLANEOUS EQUIPMENT (CONTINUED)
9. SATELLITE NAVIGATION SYSTEM
- 300 FT RAD. ACCURACY
10. METEOROLOGICAL FORECASTING
- SATELLITE CLOUD COVER PHOTO SYSTEM WAVE RIDER BUOY (SEA STATE DATA)
11. DIVERS' SUPPORT SYSTEM
- TWO 2-MAN RECOMPRESSION CHAMBERS, U/W TV, TWO LOX DEWARS 1500 GAL. CAPACITY EACH
The most unique features of the GLOMAR EXPLORER are the large center well and gates, which form a dry dock for the subsea equipment; the gimbal system and hydraulic-pneumatic heave compensation system, which provide a stable platform from which the heavy lift pipe is handled; the transverse A-frame which spans the well, supports the gimbal structure, and distributes the heavy lift load into the hull; the pipe handling systems (below deck, above deck, and heavy lift system); and the Le Tourneau docking legs which handle the subsea equipment when in close proximity to the hull.
The GLOMAR EXPLORER'S rated heavy lift capacity of 14.0 million pounds, at a continuous speed of 6 ft/min, had a large impact on the vessel's design. Machinery, structures, hull strength, and stability all are affected by this load. Tensile stresses in the heavy lift pipe leave little margin for dynamic or bending stresses due to ship's roll, pitch and heave, thus necessitating the gimballed stable
2-2
platform. The stable platform requires structure and machinery of its own, all of which is mounted across and above the center docking well. The resulting total load, high above the center of the ship, drastically changes the ship's stability and motion characteristics as well as the hull girder loading. Enough beam and ballast capacity has been provided to maintain at least the minimum amount of stability required by the U.S. Coast Guard.
Mass distribution is such that roll motions are minimal. American Bureau of Shipping high strength steel has been used where required to provide high strength with minimum weight penalty, and extends longitudinally in the hull girder from several frames forward of the docking well to several frames aft of it.
A large, unassigned space (14,000 ft3) below decks forward of the well is also available. This space could be utilized for placing laboratory vans, conference rooms, storage, etc., as required.
2-3
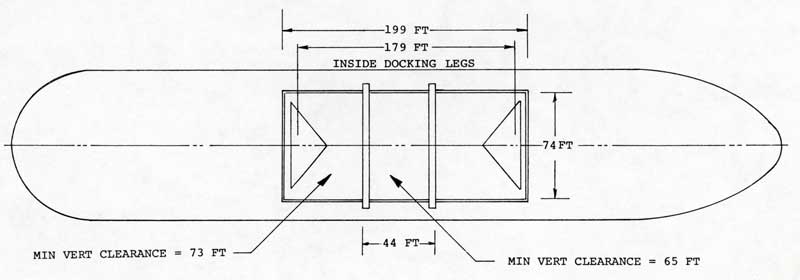
2.1 COVERED CENTER WELL AND GATES
One of the most unique features of the GLOMAR EXPLORER is the large (199 ft long x 74 ft wide x 65 ft high), dry center well. This well, which is totally enclosed, serves as a dry dock for the subsea equipment to be lowered on the pipe string. The size and general arrangement of this well are depicted in Figures 2-1 and 2-2.
The well is closed from the sea by two gates which roll longitudinally, one forward and one aft in gate guide rails. Buoyancy of the gates is controlled by regulating air volume in free flooding, saltwater ballast tanks. When the gates are closed and made buoyant, a two-compound rubber gasket between the gate and the ship's bottom shell seals against leakage into the well. The gates are operated by a rack and pinion mechanism, and are made slightly negatively buoyant when being opened or closed. The racks run along the centerline of the gates, and the pinions, located in the fore and aft cofferdams, are chain driven by a hydraulic motor with an intermediate air clutch to accommodate surge
2-4
Figure 2-1. Well Envelope
2-5
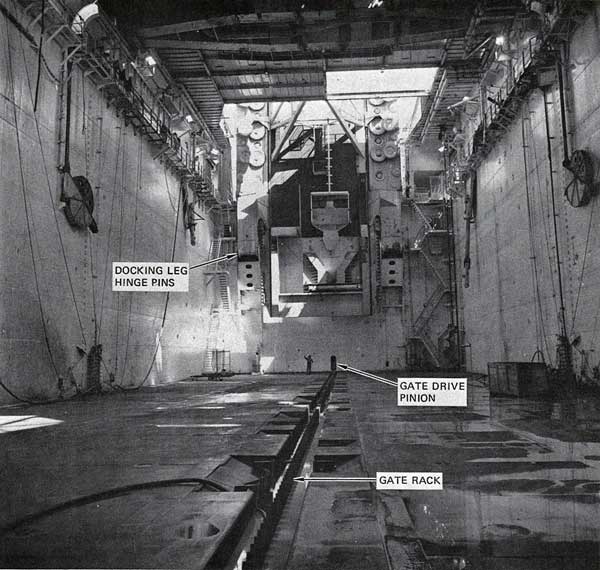
Figure 2-2. General View of Well and Gates
2-6
motion of the gates. The saltwater tanks are blown out with air when the gates are in the open position in order to keep them secure against the hull.
Prior to opening the gates the well is flooded to equalize the static head on the gates. Conversely, after closing of the gates, the well is pumped out to provide the dry environment.
Access to the well is provided by stairways and elevators. The well area can be serviced by air tuggers, the main deck pedestal cranes, and warping winches to handle extra large loads in the well. Power, welding, air, and telephone outlets are provided at various stations around the well.
2-7
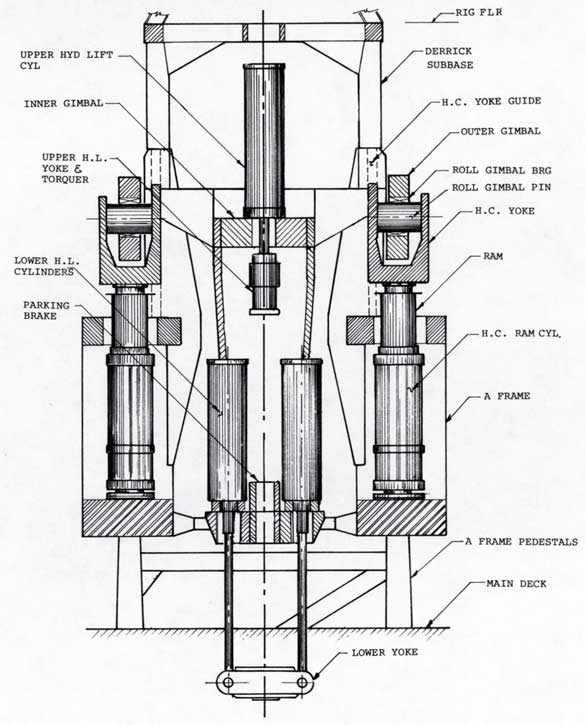
2.2 HOISTING SYSTEM
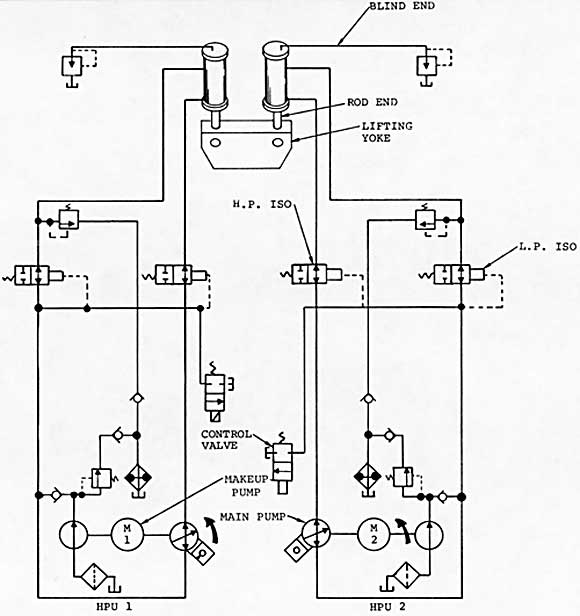
The 14,000,000 lb. (7,000 ton) capacity hoisting (heavy lift) system is the nucleus of the GLOMAR EXPLORER'S ability to lower and raise massive loads to and from the sea floor. Figures 2-3 and 2-4 show the arrangement of the four hydraulic cylinders which are mounted on the stable gimbal platform, and Figure 2-5 shows a simplified schematic of the hoisting system. The cylinders are mounted in pairs, one pair above the other and rotated 90°. Each pair of cylinders has a lifting yoke connected between the rod ends which support the pipe string at tool joints spaced every 30 feet (see Figure 2-6). In lifting or lowering the pipe string, the upper and lower cylinder pairs alternately assume and release the load in a hand over hand fashion. The system is capable of maintaining a continuous rate of 6 feet/minute.
The hydraulic system is powered by eight hydraulic pumping units located on the lower tween deck forward of the well. Each of these 1,500 H.P. units has six individual pumps. Considerable redundancy is provided by the arrangement.
2-8
Figure 2-3. Arrangement of Hoisting System Hydraulic Cylinders
2-9
Figure 2-4.Section Through Heavy Lift (Looking Fore/Aft)
2-10
Figure 2-5.Heavy Lift System Simplified Schematic
2-11
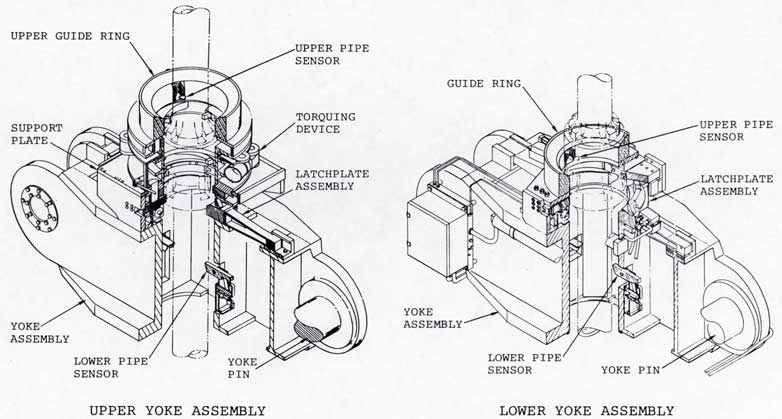
Figure 2-6. Upper and Lower Yoke Assemblies
2-12
Hydraulic lines run from the pump room below decks, to and up tripods on either side of the gimbal. The transfer from the stationary tripods to the moving gimbal is via bundles of large rotary hoses.
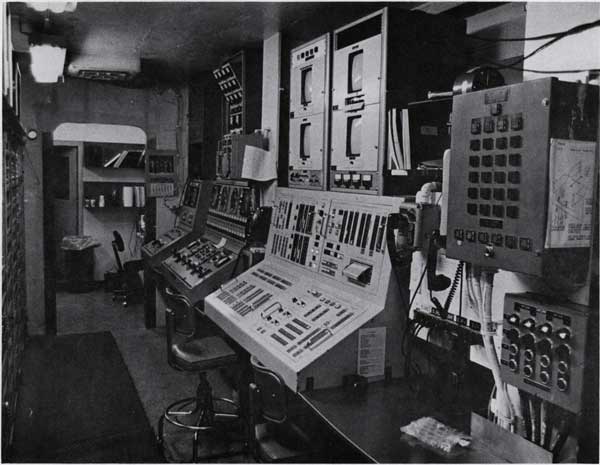
The entire hoisting system can be controlled either automatically or manually from the control room located below decks in the port wing wall aft (see Figure 7).
2-13
Figure 2-7. Heavy Lift Control Center
2-14
2.3 COMPLETELY GIMBALLED AND HEAVE COMPENSATED PLATFORM
The gimballed and heave compensated platform provides stable support for the hoisting system. This ensures that minimal bending loads are induced into the highly stressed large lifting pipe due to ship motions.
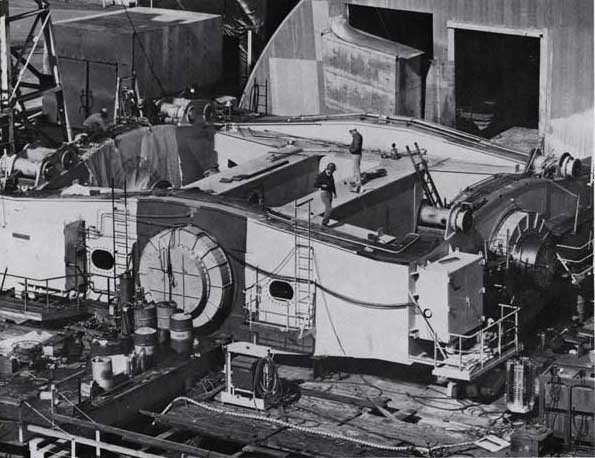
The gimbal platform consists of an outer gimbal ring, a high strength steel box weldment structure which is supported on the heave compensator ram forward and aft through support yokes (Figures 2-8 and 2-9). The connection between yoke and gimbal ring is through a longitudinal forged pin and large bearing. These pins and bearings serve as the gimbal roll pivot axis (Figure 2-10). Each yoke rides in vertical guide slots to contain the gimbal heave (15 foot total stroke). The inner gimbal structure is connected to the outer gimbal port and starboard through forged pins cantilevered to the inner gimbal and large bearings. These serve as the pitch axis (Figure 2-11).
2-15
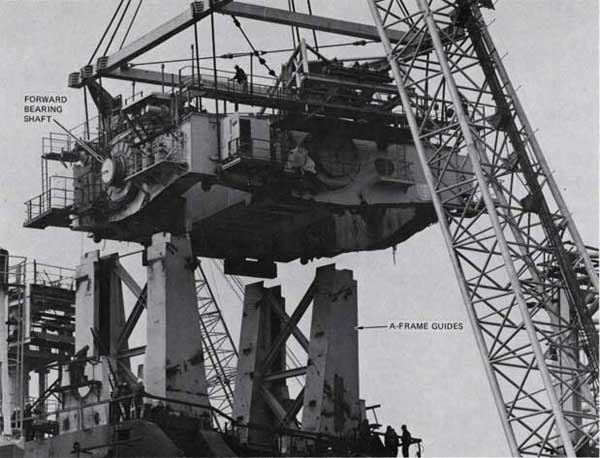
Figure 2-8. Gimbal Platform Being Lowered During Installation
2-16
Figure 2-9. Gimbal Platform During Ground Assembly
2-17
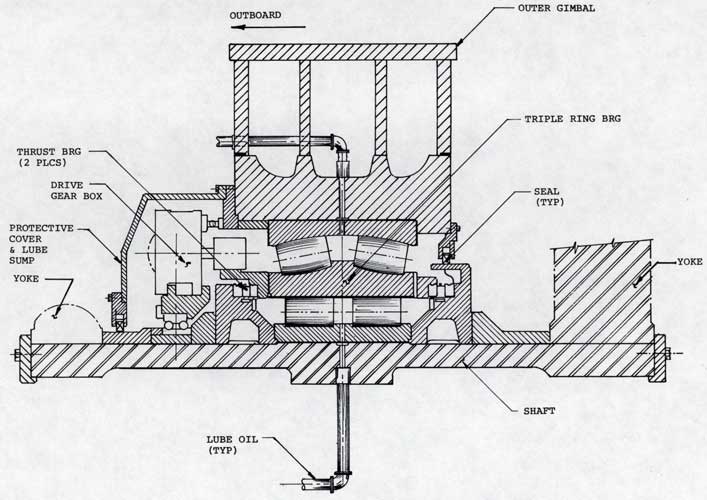
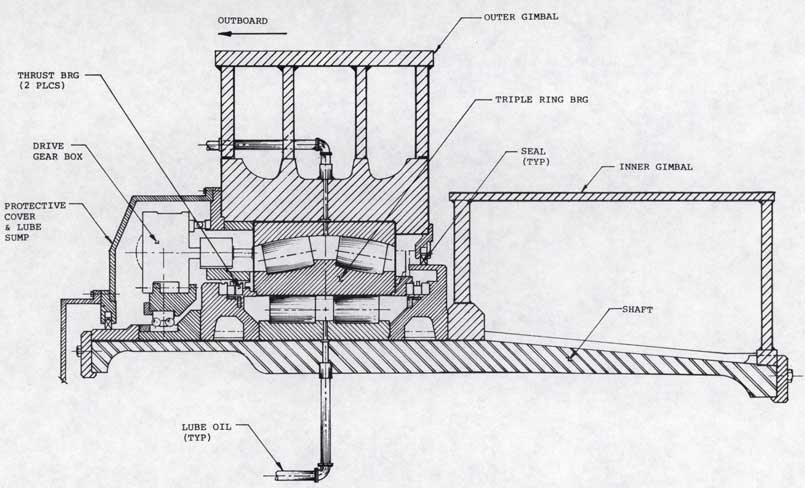
Figure 2-10. Typical Gimbal Roll Axis Bearing Installation
The 10,000,000 lb. capacity gimbal bearings (the heaviest bearings built in the world to date) are of a unique design. They consist of three races, the inner race of which is driven continuously, to provide a minimal friction, non-fretting bearing (Figure 2-12). The bearings are self aligning to allow for structural deflection under load as well as construction tolerances.
The inner gimbal, which is independent of ship roll, pitch and heave motions, forms the heart of the GLOMAR EXPLORER'S stable platform concept. The upper pair
of hoisting cylinders are mounted on the inner gimbal. Below the inner gimbal a cage structure is hung which serves to support the lower pair of heavy lift
cylinders. Also attached to the inner gimbal is the sub base structure which supports the rig floor and pipe handling derrick (Figure 2-13).
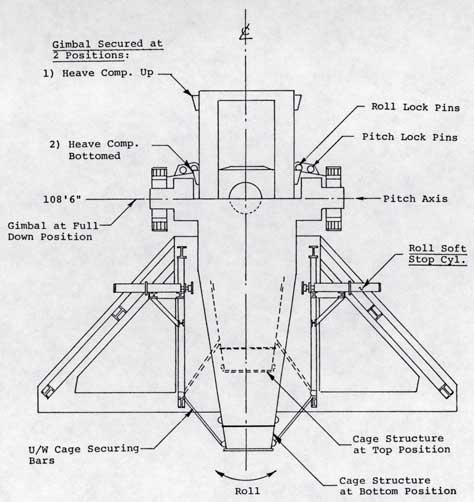
The gimbal system is capable of accommodating ship motion of ± 7 1/2 ft. heave,
± 8 1/2° roll and ± 5° pitch. A shock absorbing system is provided to protect the structure and the lift pipe if these motions are somewhat exceeded. Means
are also provided to capture and secure the gimbal system (see Figures 2-14 and 2-15).
2-20
Figure 2-12. Triple Ring Gimbal Bearing
2-21
Figure 2-13. Gimbal System and Rig Floor
2-22
Figure 2-14. Gimbal Roll Soft Stop Arrangement (Looking Fore/Aft)
2-23
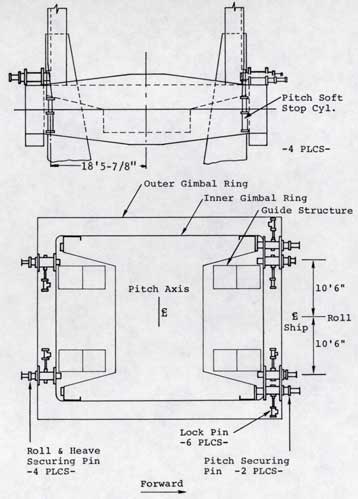
Figure 2-15. Gimbal Pitch Soft Stop and Lock Arrangement
2-24
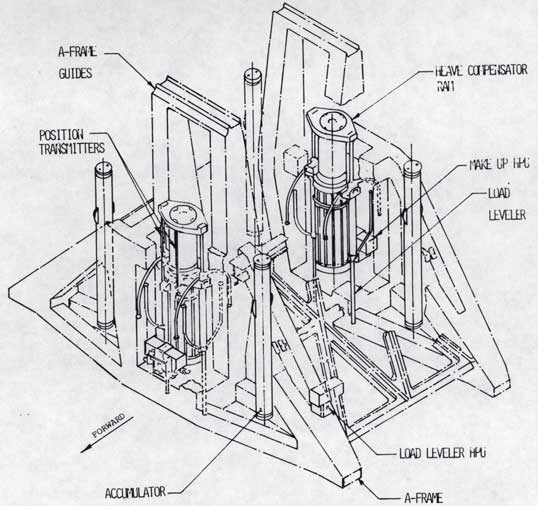
2.4 HEAVE COMPENSATOR AND HIGH PRESSURE AIR SYSTEM
The function of the heave compensation system is to minimize dynamic stresses in the pipe string. It does this by permitting relative motion between the gimbal platform and the vessel while providing a load path between the platform structure and the vessel structure. The motion is tuned to the dynamic system composed of the platform, the load, and pipe string by appropriate damping and spring rate.
The heave system is utilized while operating and docking. While the vessel is underway the heave compensation system is inoperative (the gimbal is locked up).
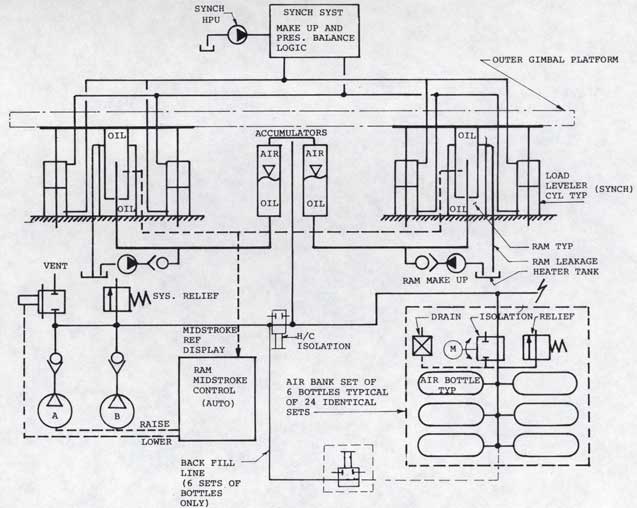
The heave compensation system shown schematically in Figure 2-16 is a passive hydraulic-pneumatic system in which the two load bearing hydraulic rams work against a compressed air bank. The hydraulic fluid is a fire resistant phosphate ester type. Air over liquid accumulators between the rams and the air bank contain the air/oil interface. They also provide the oil volume needed during ram stroking.
2-25
Figure 2-16. Heave Compensation System Schematic
2-26
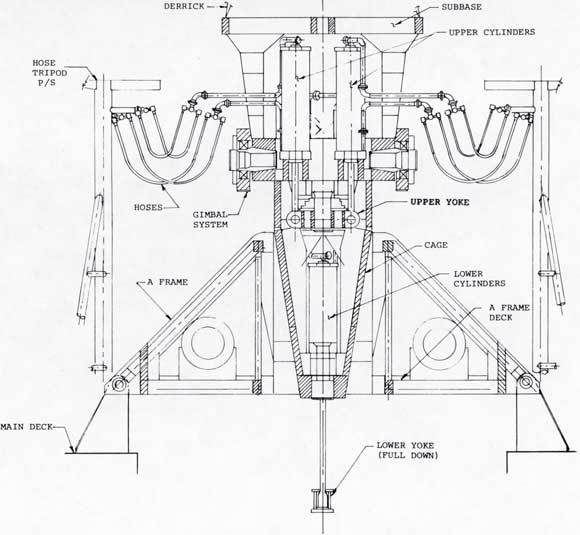
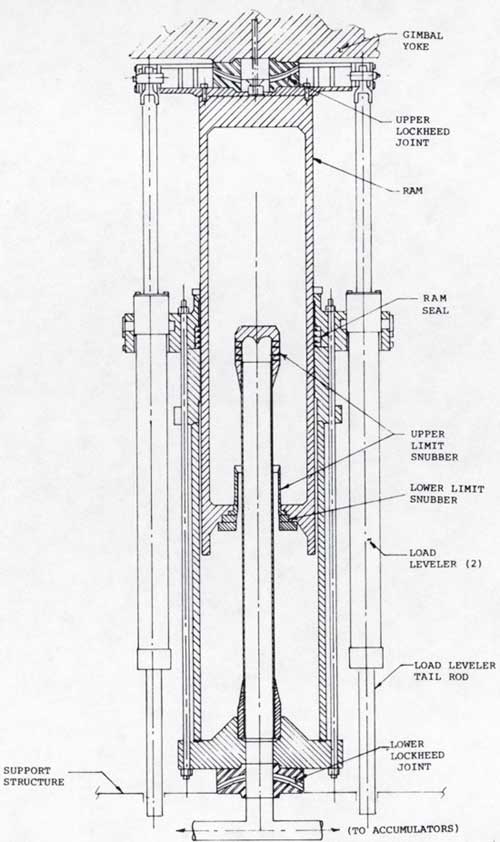
The general arrangement of the heave compensator system is shown in Figure 2-17. When the heave compensator is operating, the system pressure results from the sum of the weights of the gimbal structure, the equipment mounted on it and the pipe string load. Total heave compensator load capacity is 20,000,000 lbs. at a system pressure of 3,000 psi. The compressed air requirements are met by either of two large air compressors aboard the vessel. This air bank is composed of one hundred forty four (144), thirty-two (32) cubic foot air bottles. The air bank is divided into four groups of bottles located on the main deck at each corner of the A-frame. The system spring constant is variable in that air bottles in the air bank may be added to, or isolated from, the accumulators in groups of six.
The heave compensator rams also incorporate "snubbers" at either end of their stroke. These snubbers serve to protect the system in the event of ram over-travel. Also, in the unlikely event of a pipe break, the snubbers allow a more gradual slowdown.
2-27
Figure 2-17. Heave Compensator Ram
2-28
Makeup pumping units are utilized at either ram to return leakage oil from the ram seals back into the system. A pair of load leveller cylinders are connected mechanically to each ram. The load leveller cylinders are double acting cylinders hydraulically interconnected as shown in Figure 2-18. The combination of mechanical and hydraulic connections force the two pairs of load leveller cylinders and consequently the two rams to move in unison when subjected to unbalanced loads (friction in yoke guides).
An instrumentation and control system is provided to monitor the functioning of the heave compensation system and to allow necessary corrective control actions to be taken. The primary control function is the determination of a ram midstroke position and the necessary addition or removal of air to or from the system to maintain the ram midstroke of the desired level. Other control functions are the operation of the oil makeup systems for both the rams and the load leveller systems.
2-29
Figure 2-18. Heave Compensator System
2-30
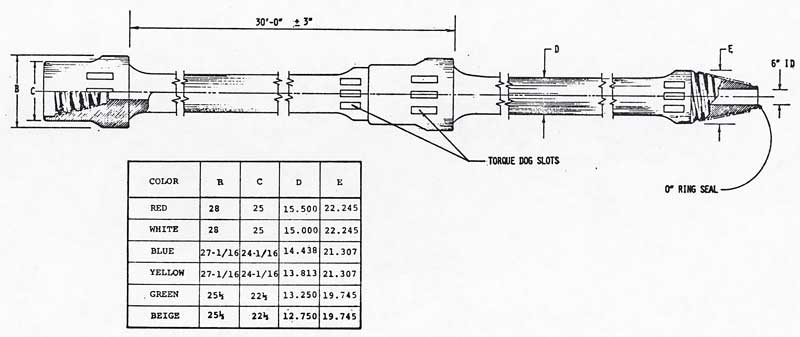
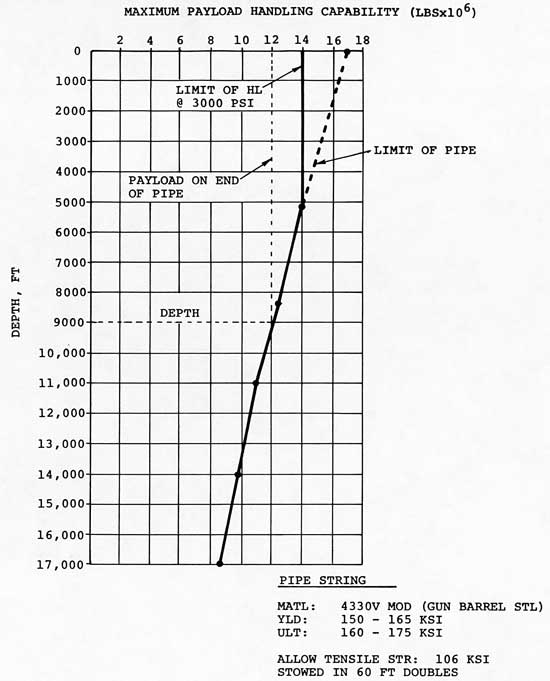
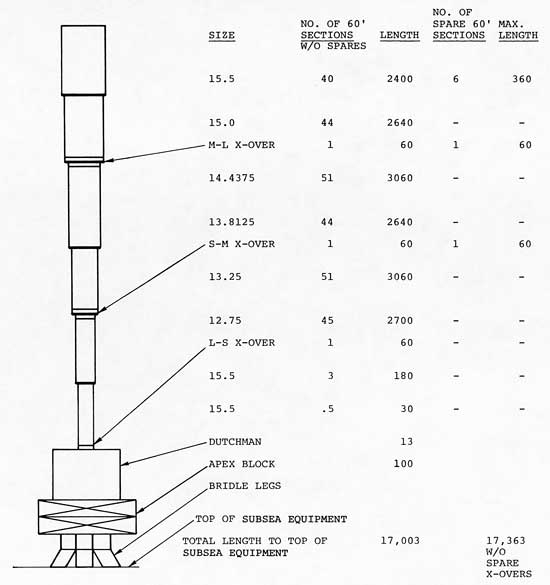
2.5 17,000 FOOT TAPERED PIPE STRING
The lift pipe is used to support the subsea equipment during lowering and raising operations and while working on or near the sea floor. The string consists of a series of threaded, gun barrel steel pipe sections, each 30 feet in length. Normally the pipe is stored, handled, made up and broken down from the string in 60 foot doubles. In order to minimize weight, the string is stepped with six different sizes in body diameter (varying from 12.75 inch to 15.50 inch) and three different sized tool joints (25.5 inch to 28 inch O.D.). The transition from one joint size to the other is accomplished by cross-over pipe sections. Figure 2-19 shows a typical pipe double configuration, and Figure 2-20 a view of a pipe pin end with threads and torque slots.
The pipe string can be made up for any depth of operation (17,000 feet maximum). Figure 2-21 shows the payload lift capability of an optimized pipe string as a function of depth. This payload varies from over 16,000,000 lbs. at shallow depths to 8,500,000 lbs. at a depth of 17,000 feet. Figure 2-22 shows a schematic profile of a maximum depth string.
2-31
Figure 2-19. Composite Pipe Assembly
2-32
Figure 2-20. View of Pipe Pin End Showing Threads and Torque Slots
2-33
Figure 2-21. Pipe Static Lift Capability
2-34
Figure 2-22. Typical Pipe String Profile for 17,000 Foot Depth
2-35
Each pipe section consists of a pin end and box end with constant diameter
center sections connecting them. Both ends have larger diameter support shoulders which rest on the lifting yokes and include nine slots spaced around the shoulder for torquing/detorquing mating joints. The pipe is coated, inside and out, for protection from saltwater corrosion.
Pipe threads are protected with a special thread compound which is inspected and reapplied as necessary each time the pipe is used.
The pipe string is made up or broken down by the hoisting system with pipe delivered and removed to storage by the pipe handling system. The heavy lift pipe is stowed in the pipe storage hold in six bays. Steel sleepers stack the pipe in an orderly fashion and serve to protect the pipe from damage.
2-36
2.6 AUTOMATIC STATION KEEPING SYSTEM
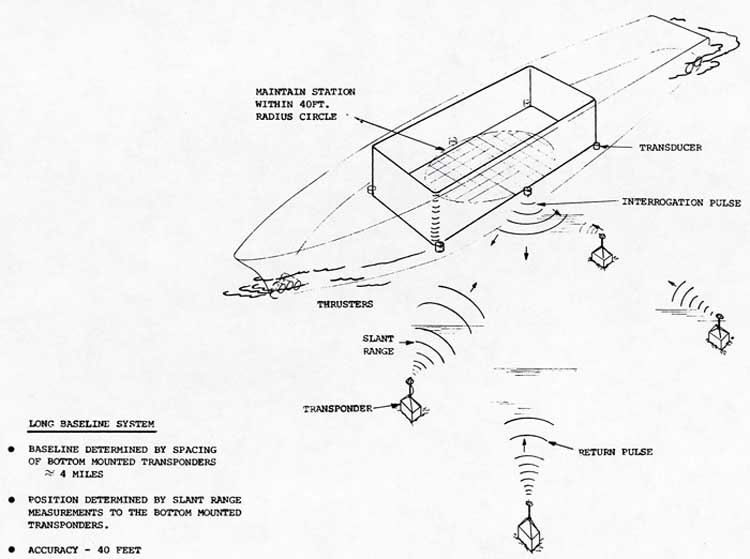
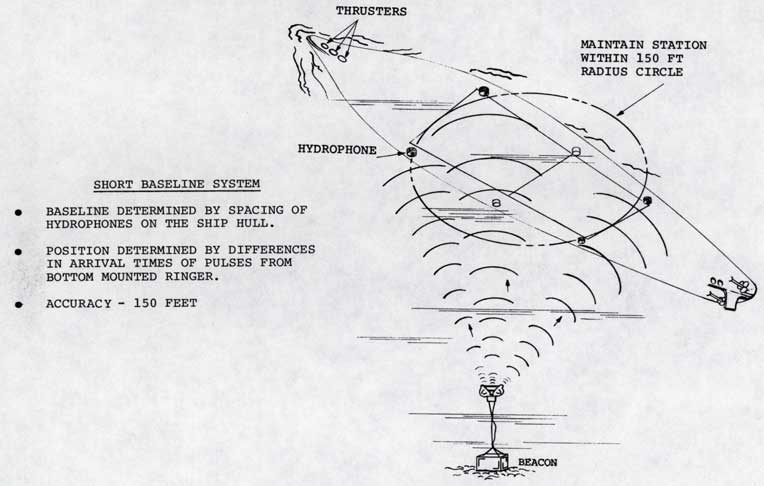
The GLOMAR EXPLORER is equipped with two Automatic Station Keeping (ASK) systems. The Long Baseline System (LBS) is used primarily when precise positioning of the ship is required over a large working area while operating in water depths over 3000 feet. The Short Baseline System (SBS) provides less accurate positioning but can be used in virtually any water depth. Both systems provide redundant parameter sensing, signal processing, and command functions with automatic switching when failures occur.
Both systems utilize any combination of five thrusters (three forward and two aft) and the two main screws. Each thruster is capable of 1750 HP and each screw can develop 6600 HP.
Control of the ASK system is from the After Bridge, whereas system performance can be monitored either at the After Bridge or at the ASK electronics van located on the Superstructure Deck.
Figures 2-23 through 2-32 show various controls and patterns of the ASK system.
2-37
Figure 2-23.Long Baseline System (LBS)
2-38
Figure 2-24.SBS Operation
2-39
Figure 2-25.Typical Beacon and Transponder Deployment Pattern
2-40
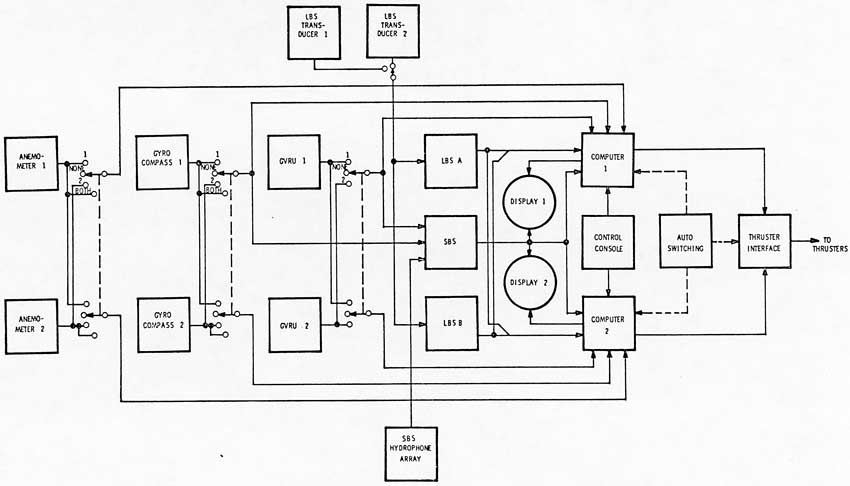
Figure 2-26. ASK System Simplified Block Diagram
2-41
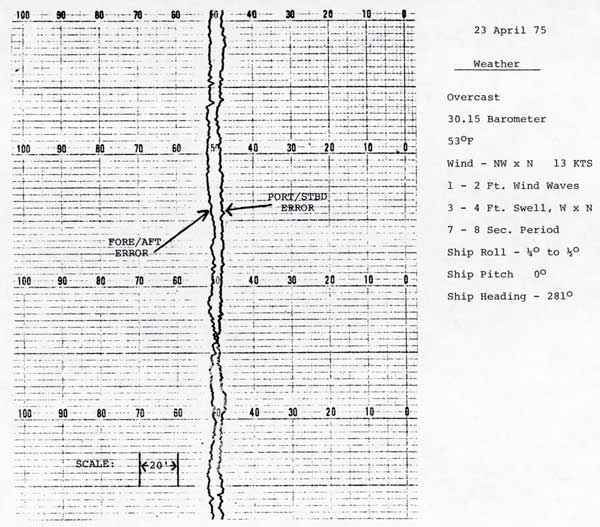
Figure 2-27. LBS Operation, Ship's Position Error
2-42
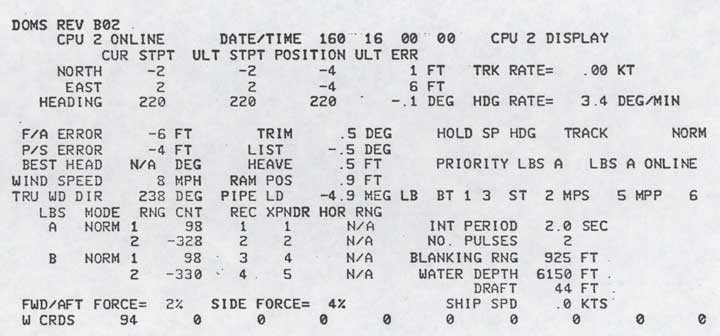
Figure 2-28. ASK/Ship's Systems Status Display
2-43
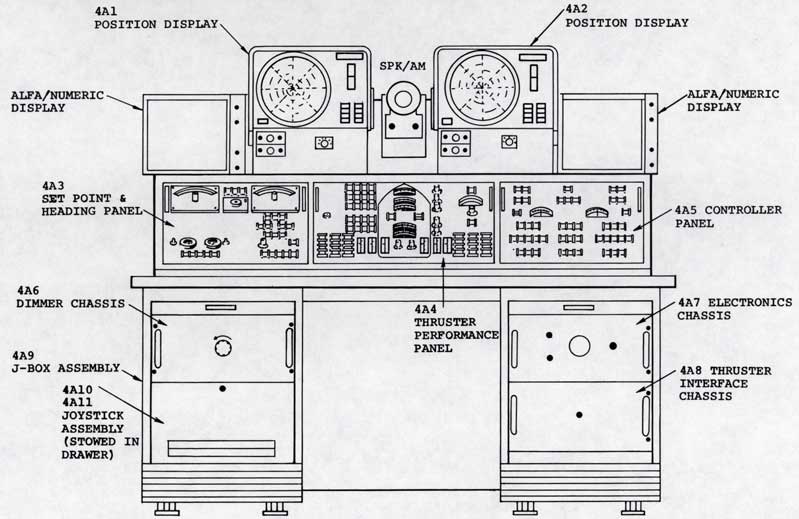
Figure 2-29. ASK Control Console
2-44
Figure 2-30. Aft Bridge, ASK Console
2-45
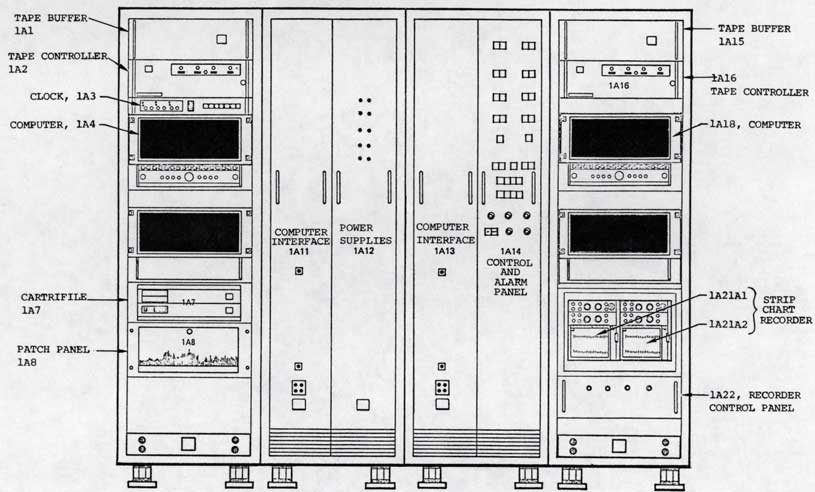
Figure 2-31. ASK Unit Cabinet 1
2-46
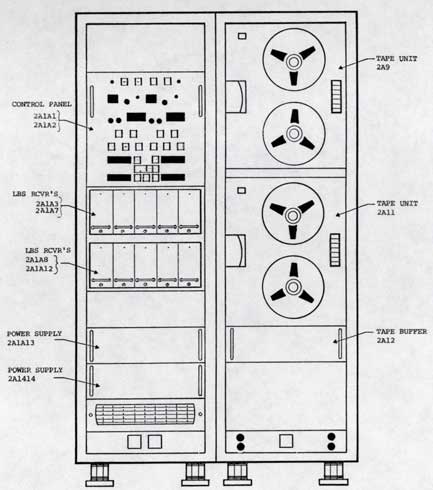
Figure 2-32. ASK Unit Cabinet 2
2-47
2.6.1 ASK System Performance
The ASK system is capable of positioning the ship to meet the accuracy and area of coverage requirements shown below when subjected to the following environmental conditions or any less severe environment:
• Waves
Significant height (fully developed sea, Neuman spectra)
12 feet
• Swells
Significant height
18 feet
Period
12 seconds
• Surface Current Velocity
1 Knot
• Wind
Spectrum
Van Derhoven
Distribution
Gaussian
Mean velocity
40 knots
• Maximum Water Depth (LBS/SBS)
18,000 feet
• Minimum Water Depth (LBS)
3,000 feet
• Minimum Water Depth (SBS)
N.A.
2-48
The ASK system will also automatically maintain the position and heading of the ship to the following accuracy when operating within the environmental conditions' limitations shown above:
• LBS
Position
40 feet (3 sigma)
Heading
± 2°
• SBS
Position
150 feet (3 sigma)
Heading
± 2°
In addition, the ASK system will position the ship, within the environmental conditions and with the accuracy shown above, at any point within the following areas of coverage:
• LBS
A circular area having a diameter equal to 50 percent of the water depth (in maximum water depth) which is centered directly over the center of
the LBS transponder array.
2-49
• SBS
A circular area having a radius equal to 12 percent of the water depth and centered directly over the beacon.
Five position control modes are provided for positioning the vessel - three for position and two for heading. These modes are:
• Joystick - A manual mode that provides X and Y force commands from an operator controlled joystick.
• Manual Moment - A mode that provides manual control of the moment command, generated from a proportional control dia. This mode provides emergency heading control in the event that no gyrocompass is available.
• Setpoint Position - In this mode, X and Y force commands are automatically computed, based on the acoustic position referencing system and a set point position input by the operator.
2-50
• Track - Thruster commands are automatically computed, based on inputs from the acoustic position referencing system and selected ship track input by the operator.
• Hold Setpoint Heading - Heading control is based on a reference heading selected at the control console. Moment commands are computed based on the difference between the reference heading and the gyrocompass output.
2-51
2.6.2 ASK Control Console
Control of the ASK system is realized at the control console located in the aft pilot house, which provides the controls, indicators and displays necessary in operating the system. Major units of the console are as follows:
Controller Panel (4A5)
Thruster Performance Panel (4A4)
Set Point Command and Heading Panel (4A3)
Display Assembly (2) (4A1, 4A2)
Console Electronics Chassis (4A7)
Thruster Interface Chassis (4A8)
Dimmer Control Chassis (4A6)
Manual Moment Assembly (4A11)
Joystick Assembly (4A10)
Junction Box Assembly (4A9)
2-52
2.6.3 ASK Unit Cabinet 1
This enclosure contains the ASK system digital computers, interface and alarm chassis, power supplies, and recording equipment. Major assemblies of the cabinet are as follows:
Magnetic Tape Buffer (1A1, 1A15)
Magnetic Tape Controller (1A2, 1A16)
Time of Day Clock (1A3)
H-316 Digital Computer (1A4, 1A18)
Cassette Recorder (Cartrifile) (1A7)
Patch Panel (1A8)
Computer Interface (A/D, DID, D/A) (1A11, 1A13)
Sensor Control and Alarm Chassis (1A14)
Strip Chart Recorder (1A21A1, 1A21A2)
Strip Chart Control Panel (1A22)
Power Supply Chassis (1A12)
2-53
2.6.4 ASK Unit Cabinet 2
This cabinet contains the LBS receivers and control panel, magnetic tape units, and power supplies. Major assemblies of the cabinet are as follows:
LBS Receiver (2A1A3 - A12)
LBS Control Panel (2A1A1, 2A1A2)
LBS Power Supply (2A1A13, 2A1A14)
Magnetic Tape Unit (2A9, 2A11)
Magnetic Tape Buffer (2A12)
2-54
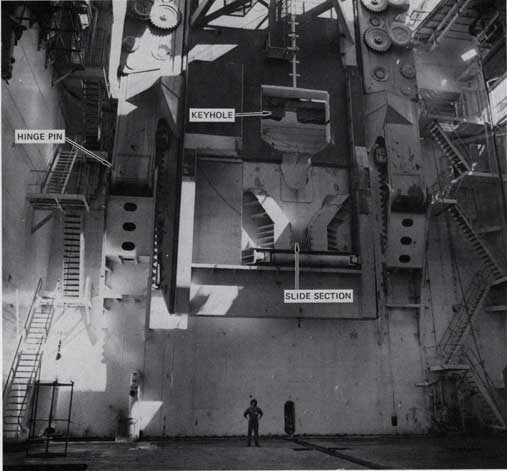
2.7 DOCKING LEG SYSTEM
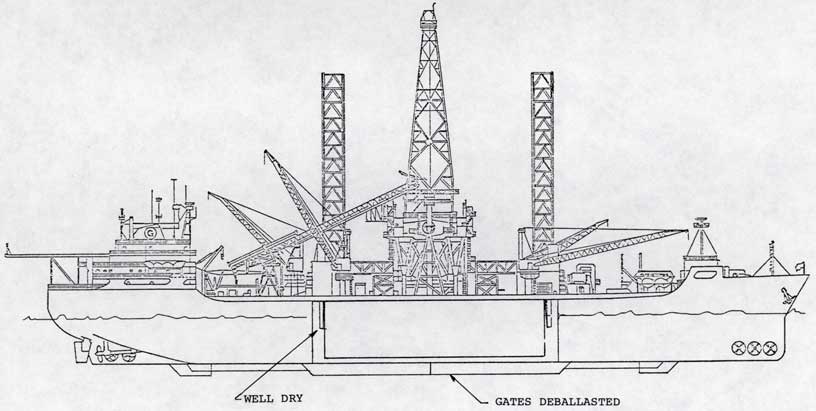
The docking legs, located at either end of the well, are used to transfer the equipment stowed in the dry well from the well to/from the lift pipe. The docking leg length allows the transfer to be made well below the water line (100 feet) where relative motions are minimized. The step by step sequence of this docking/undocking operation is shown in Figures 2-33 through 2-37. Whenever the undersea equipment is in the well, it is supported on the docking legs.
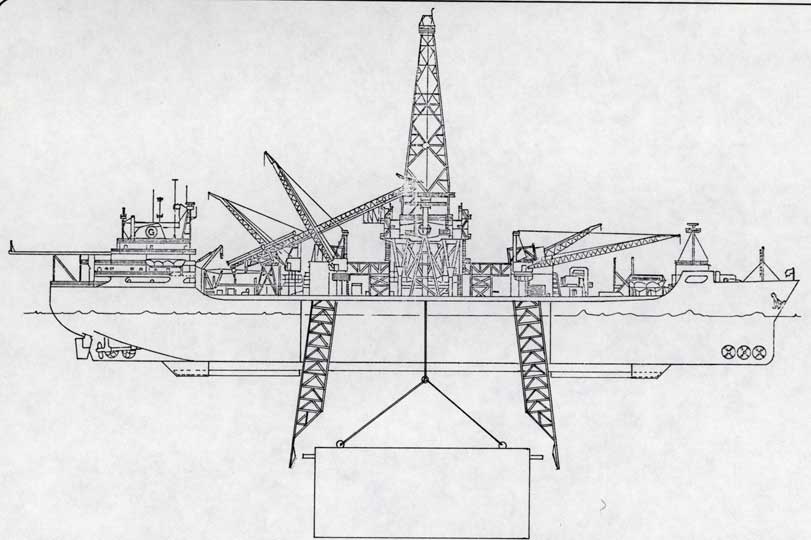
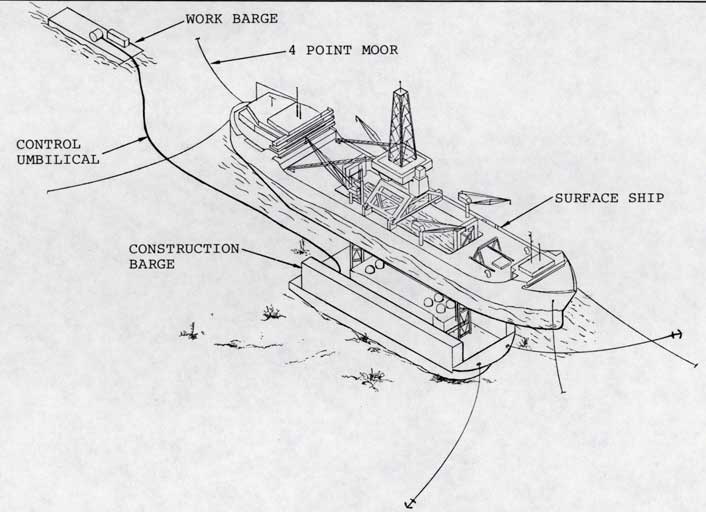
The docking leg system can also be used to transfer subsea equipment from a submersible barge to the ship, referred to as mating or demating, as shown in Figure 2-38.
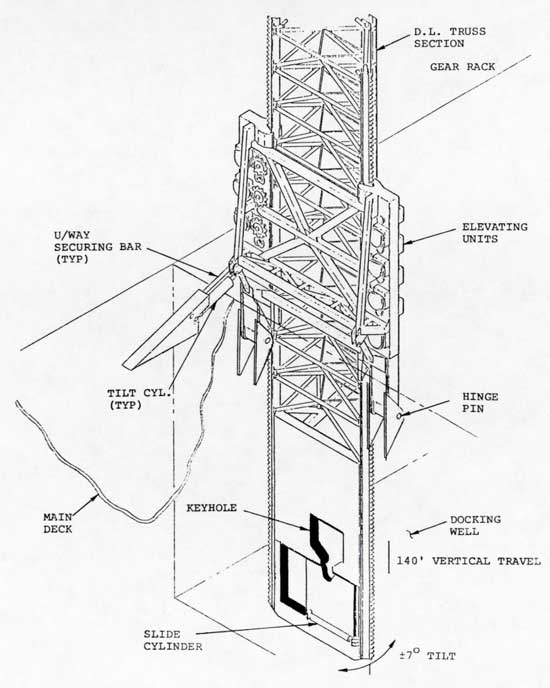
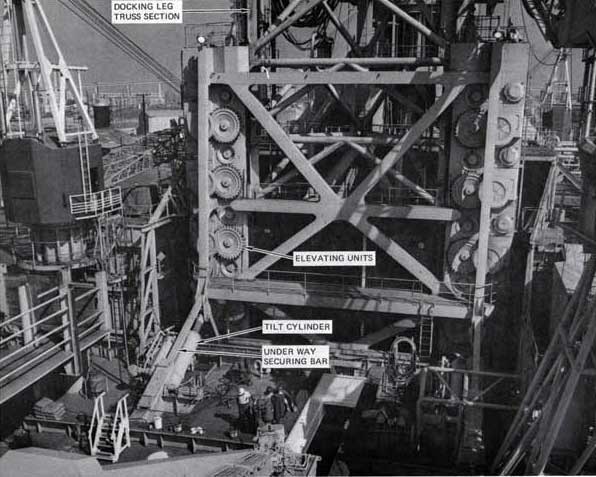
The Le Tourneau docking legs (Figure 2-39) are similar to those used on Le Tourneau offshore oil platforms. The upper section of the legs themselves are simple triangular truss sections. The flat lower section incorporates a "key way" section to engage a mating pin on the undersea equipment during docking and to support the equipment while in the well. This lower leg section also incorporates a sliding
2-55
Figure 2-33. Condition on Arrival at Work Area
2-56
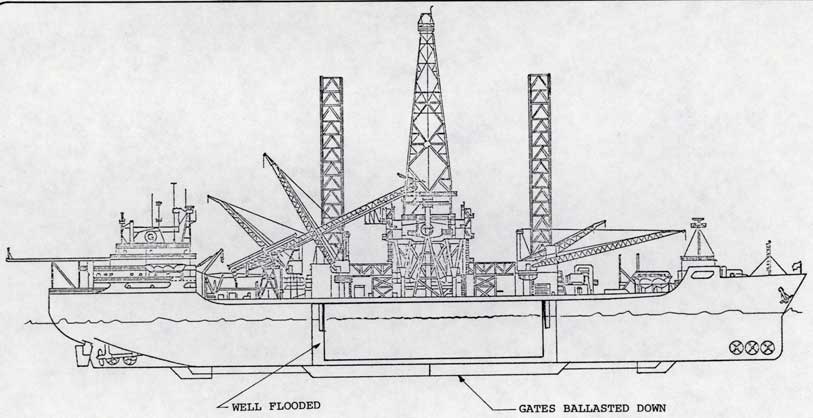
Figure 2-34. Well Flooded - Gates Ballasted
2-57
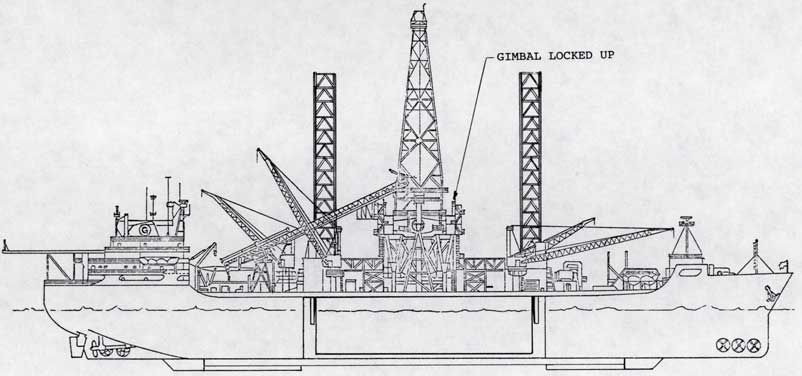
Figure 2-35. Gates Opened and Deballasted
2-58
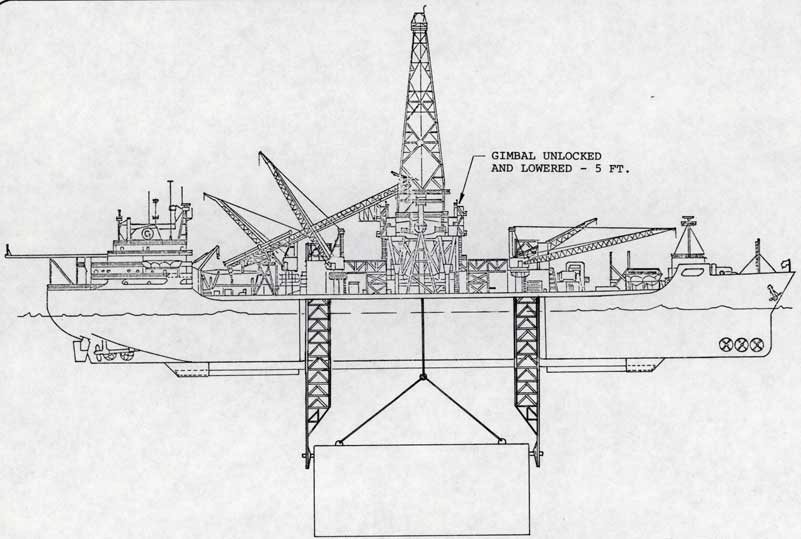
Figure 2-36. Subsea Equipment Lowered to Release Depth
2-59
Figure 2-37. Subsea Equipment Undocked and Ready for Lowering
2-60
Figure 2-38. Mate/Demate Configuration
2-61
Figure 2-39. Docking Leg System (1 of 3)
2-62
Figure 2-39. Docking Leg System (2 of 3)
2-63
Figure 2-39. Docking Lea System (3 of 3)
2-64
portion to allow lateral shifting of the supported equipment. This allows storage of unsymmetrical equipment in the well. A continuous rack runs up the entire length of both sides of the leg. The legs are raised/lowered by electric powered elevating units on either side of each leg. The elevating units are interconnected by a truss work and supported on hinge pin attachments to the cofferdam at either end of the well. While the legs are fully elevated they are locked in place with locking bars. During undocking, after the legs have been lowered to a certain depth, these locking bars are disconnected. The legs are then controlled in tilt by the large tilt cylinders (2 on each leg). In addition to providing a means of tilting the legs in or out, these cylinders also have integral hydraulic manifolds with snubbing valves to dampen "swinging" motions of the legs induced by ship pitching.
The load capabilities of the docking leg system under various operating conditions are summarized in Table 2-1.
2-65
TABLE 2-1.DOCKING LEG SYSTEM DESIGN CRITERIA
I. LOADS
(Load acting at subsea equipment attachment pin unless noted.)
1. Operating
a. Lift (per leg plus leg weight)
5,000,000 lbs Load acting on leg C/L Leg pitched ± 1° from vertical; full extended
4,000,000 lbs Load acting 4 ft off leg C/L Leg pitched ± 20 from vertical Leg extended 60 ft or less
b. Side (Lateral) (per leg)
600,000 lbs Leg fully extended
900,000 lbs Leg extended 60 ft or less
c. Fore/Aft
100,000 lbs Leg fully extended
d. Tilt cylinder reaction (ea.)
1,500,000 lbs Applied to elevating units
2-66
TABLE 2-1. DOCKING LEG SYSTEM DESIGN CRITERIA (CONTINUED)
e. Fore/Aft (per leg)
600,000 lbs Leg fully retracted and lower section in guides
f. Foundation pin reaction (per pin)
5,000,000 lbs
g. Torque (per leg)
25,000,000 ft-lbs
2. Impact Loads During Docking
Vertical
2,500,000 lbs
Lateral
600,000 lbs
Fore-Aft
100,000 lbs
II. RELATIVE MOTION DURING DOCKING (BETWEEN LEG AND SUBSEA EQUIPMENT)
Vertical
± 3 ft
Lateral
± 3.5 ft
Fore-Aft
± 6 ft
2-67
TABLE 2-1. DOCKING LEG SYSTEM DESIGN CRITERIA (CONTINUED)
III. GEOMETRIC REQUIREMENTS
Leg Tilt
± 7°
Leg Travel
138 ft
Max. Lift of Subsea Equipment Upper Pin
60 ft above baseline
Max. Extension of Stabbing Hole
65 ft below baseline
Fore-Aft Distance Between Lift Points
186 ft, 4 inches ± 1/8 inch
Stabbing Hole
100 ft below waterline
2-68
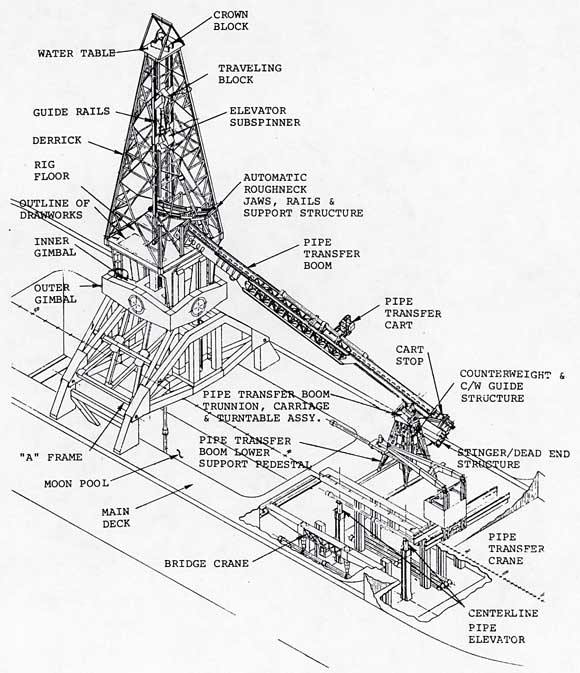
2.8 SEMI-AUTOMATIC PIPE HANDLING SYSTEM
The pipe handling system is designed to transport the heavy lift pipe from the pipe storage hold, aft of the docking well, to a vertical position in the derrick for sequential assembly into the pipe string (or the reverse sequence). This system consists of the following seven major subsystems (see Figures 2-40 and 2-41).
Below deck bridge cranes
Centerline elevator
Transfer crane
Transfer boom and cart
Automatic roughneck
Elevator-subspinner
Derrick and drilling equipment
2-69
Figure 2-40. Pipe Handling System
2-70
Figure 2-41. Pipe Handling System, Above Deck (1 of 2)
2-71
Figure 2-41. Pipe Handling System, Above Deck (2 of 2)
2-72
The major requirement of the overall system is the capability to deliver or receive a 40,000 pound, 60 foot long heavy lift pipe every 10 minutes continuously under ± 3 1/2 degrees roll, ± 3 degrees pitch and ± 5 feet heave ship operating conditions.
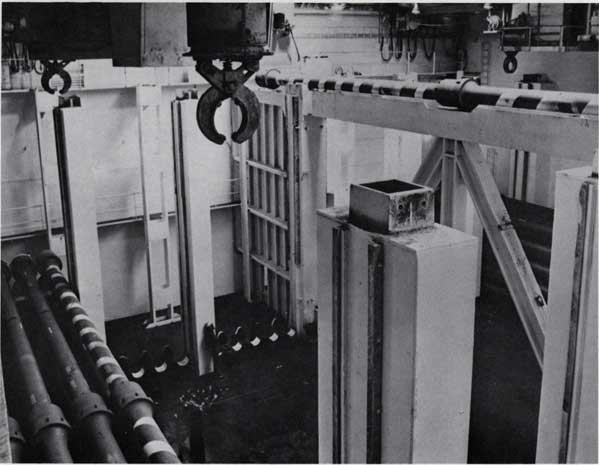
The bridge cranes transfer the heavy lift pipe in the pipe storage hold between the storage bays and the centerline elevator trunks (see Figure 2-42). The bridge cranes also place and remove the sleepers from the bays to the sleeper stowage areas at the fore and aft ends of the hold. There are two bridge cranes, one port and one starboard. Each can service five of the six bays and the centerline elevator. The electric powered, rack and pinion drive is mounted overhead of the stowed pipe on transverse rails. Monorail cranes on the fore and aft end of the bridge cranes handle the pipe sleepers.
The centerline elevator lifts or lowers the heavy lift pipe between the elevator trunks and a position five feet above the main deck level. The elevators consist
2-73
Figure 2-42. Pipe Handling System, Below Deck
2-74
of two - 250 1/4 inch stroke, double-acting hydraulic cylinders, guided with telescoping guides.
The transfer crane delivers or receives pipe from the centerline elevator in its elevated position five feet above the main deck to the transfer boom cart. The crane is powered by a diesel engine driving multiple hydraulic pumps. The control system is an electro-mechanical semi-automatic or completely manual system.
This crane is driven transversely by a rack and pinion drive. The crane boom tilt is powered by a hydraulic cylinder. The pipe grapple drive screws are actuated by a hydraulic motor. This unit is rotated and tilted with hydraulic cylinders for pipe positioning. The transfer boom system transfers the heavy lift pipe from main deck starboard to the gimballed rig floor. The lower section of the pipe transfer boom is supported on a gimbal which also allows the boom to translate fore and aft. The upper end of the boom is pinned to and supported above the rig floor.
2-75
The pipe is transported upon a cart which rides the boom and is raised and lowered by a cable and hydraulic hoist mounted at the upper end of the boom. This system is controlled semi-automatically by an operator on the rig floor.
The derrick pipe handling system consists of two major subsystems:
1. The automatic roughneck - This device handles the lower end of the pipe from the transfer cart to the well centerline. This unit is controlled by the operator who is also controlling the transfer system.
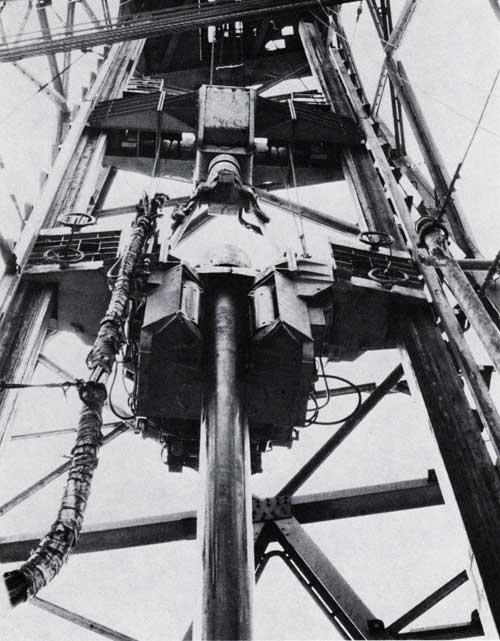
2. The elevator-subspinner - This device is hooked below the traveling block and handles the upper end of the heavy lift pipe. It also provides sub-torquing of the pipe into the string (see Figure 2-43).
2-76
Figure 2-43. Pipe Handling Elevator Subspinner (ESS)
2-77
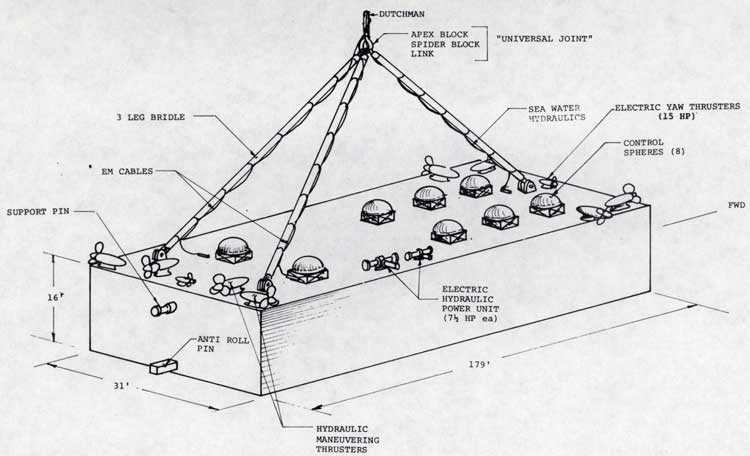
2.9 POSITIONABLE UNDERWATER WORK PLATFORM
It is possible to lower a large positionable underwater work platform from the GLOMAR EXPLORER. Figure 2-44 depicts such a platform which has the capability to maintain position within ± 2 1/2 feet in surge, sway and heave (Sea States 4 and 5).
The platform is suspended from the pipe string on a three-legged bridle and is connected to the pipe through a pinned joint. Power to the platform is provided via the two EM cables and seawater hydraulics system supplied from the surface vessel. Maneuvering or positioning is maintained with the eight large seawater powered thrusters. Two smaller electric yaw thrusters supply fine control. The eight pressure spheres contain the control logic. The two large pins at either end of the platform are used to capture and support the system with the docking legs.
2-78
Figure 2-44. Positionable Underwater Work Platform
2-79
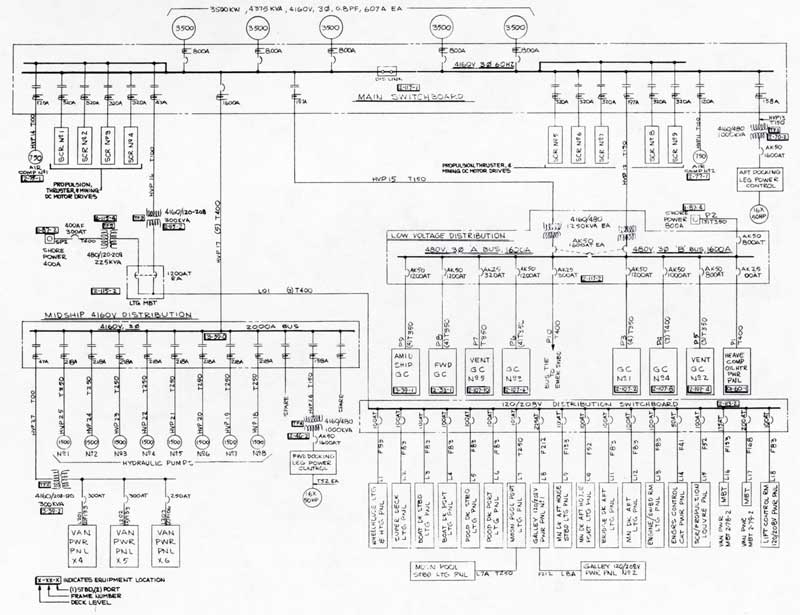
2.10 MAIN POWER SYSTEM
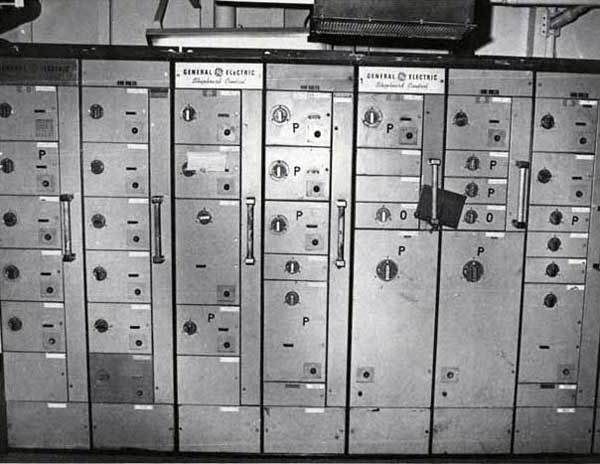
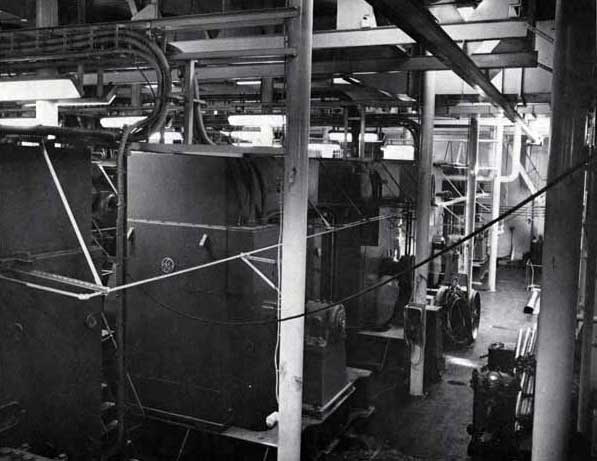
This ship is basically a diesel electric vessel. Primary power is generated by five diesel generator sets which provide power to a common AC power bus. Each generator is capable of developing 4375 KVA of three phase power at 4160 V, 60 HZ with a 0.8 power factor. This power is then distributed directly as 4160 VAC or is stepped down to 480 VAC and distributed through any of three major motor control centers. 120/208 VAC power is also provided via transformers and multiple distribution panels for lighting and other small electrical loads. Static converters are used to provide controllable DC power for use with the propulsion motors, thrusters, and subsea equipment.
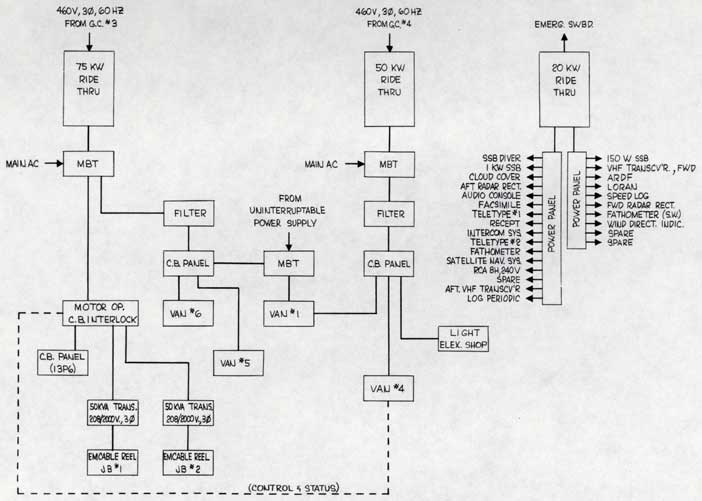
Many of the sophisticated electronic loads used aboard the GLOMAR EXPLORER require highly regulated clean "power". A series of ride-through (flywheel coupled motor-generator sets) power supplies are provided to accommodate these power requirements.
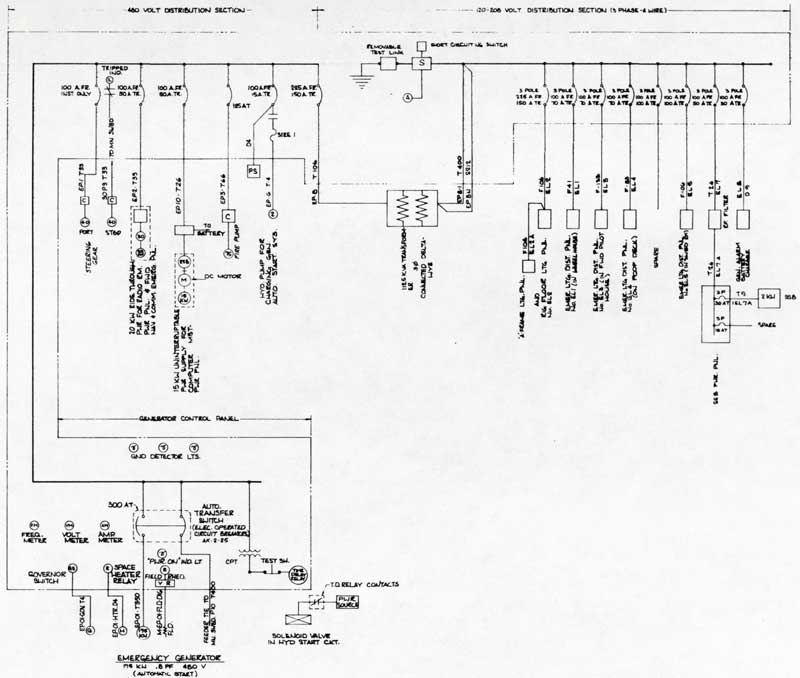
2-80
In the event the main power plant drops off the line, an emergency diesel-generator set is provided. The diesel automatically starts on loss of main plant power and the emergency generator is automatically connected to the emergency power distribution switchboard.
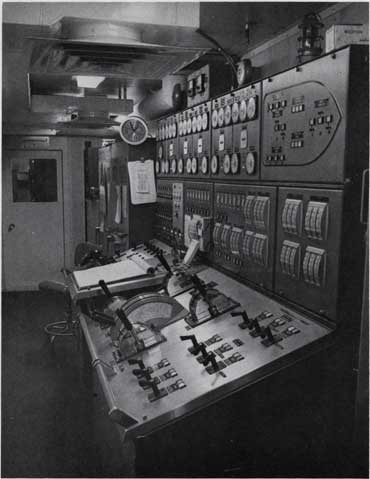
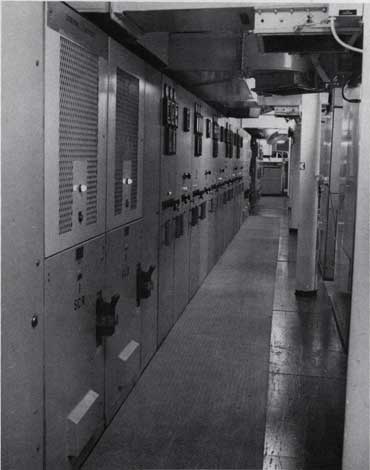
Monitoring of the power generation and distribution system is performed from the Engineer's Control Room located in the main switchboard room. Control of the diesel-generator and various power distribution assignments are also made from the control center.
The entire generation and distribution system has been built to meet or exceed USCG-259, IEEE-45, and ABS Rules and Regulations for marine electrical systems. Table 2-2 and Figures 2-45 through 2-51 show aspects of the main power system.
2-81
TABLE 2-2. ELECTRICAL PLANT SPECIFICATIONS
PRIMARY POWER
• Five G.E. Type 5AT19427-54A1 generators, each rated at 4375 KVA at 0.8 PF, 4160 V, 3 0, 60 HZ, 514 RPM
• Woodward Type 2301 load sensing electronic governors
DC POWER
• Nine G.E. Type Siltrol I Power Converters, each with the following ratings:
- 4160 VAC input
- 750 VDC output
- 2500 Amps DC output
- Output controllable from 0 to 100% load 480 V POWER
• Dual 1250 KVA, 480 VAC Main Distribution Center (total 2500 KVA, 480 VAC capability)
• Three (3) major 480 V Motor Control Centers (Forward, Midships, Aft)
• Two (2) major distribution centers (Midships, Aft)
115/208 VAC POWER
• Three (3) major distribution centers (Forward, Midships, Aft)
• 870 KVA total distribution capability
EMERGENCY POWER
• One G.E. Type 5SJ449P26Y5 generator rated at 175 KW, 480 VAC, 3 0, 60 HZ
• Automatic starting upon main power loss
2-83
Figure 2-45. Basic Power Generation and Distribution
2-84
Figure 2-46. Emergency Power System
2-85
Figure 2-47. Ride-Through Power System
2-86
Figure 2-48. Engineer's Control Console
2-87
Figure 2-49. Main Switchboard Room
2-88
Figure 2-50. Typical Motor Control Center
2-89
Figure 2-51. Main Generator Room
3-0
SECTION 3 - OPERATIONS
3-1
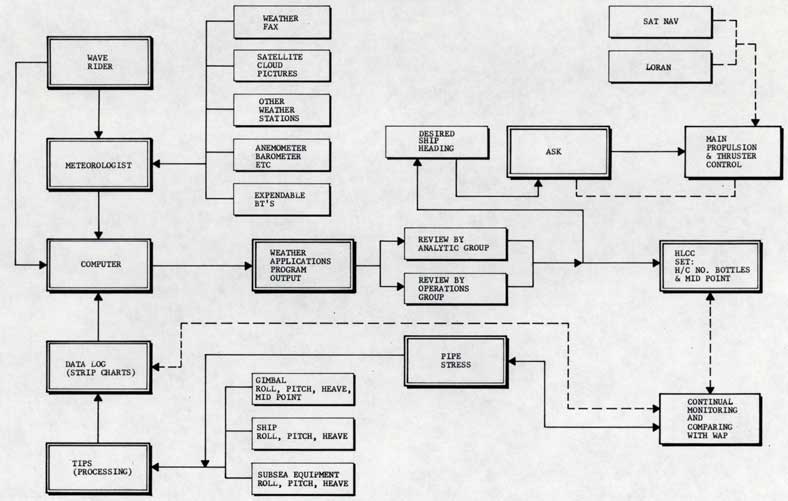
The operation of an enormously complex system such as the GLOMAR EXPLORER necessarily requires highly sophisticated coordination of all activities. During the first years of operation, the extensive detailed procedures required have been developed. Crews and specialists have become highly trained in the use and behavior of this ship and its equipment.
Figure 3-1 gives an overview of the coordination used to control operating parameters of the ship, gimbal and pipe string. There is continual feedback between weather (sea state) and its effect on the dynamic pipe string and gimbal system. An example of the control of the step by step events involved in lowering subsea equipment to the sea floor is shown in Figure 3-2.



 . In addition, the ship complies with the applicable requirements of governmental regulatory bodies, such as the U.S. Coast Guard, Federal Communications Commission, and U.S. Public Health Service.
. In addition, the ship complies with the applicable requirements of governmental regulatory bodies, such as the U.S. Coast Guard, Federal Communications Commission, and U.S. Public Health Service.